1.本技术涉及一种建筑材料运输的技术领域,尤其是涉及一种环保建筑用运输作业机器人。
背景技术:
2.在建筑工程中材料运输量大,种类多,通常采用机械和人工进行运输,材料包括模板、钢筋、玻璃和砖块等,对于砖块的运输通常为人工采用推车并配合塔吊,具体过程为先将砖块装入到推车内,将推车推到塔吊的位置,然后通过塔吊将推车吊起,使砖块运输到对应的楼层后,再将推车从塔吊上取下,使砖块存放在对应的楼层内,从而方便后续对楼层主体内进行填充。
3.申请公布号cn109109998a的专利申请文件中公开了一种环保建筑用运输作业机器人,包括机架和设于机架上的厢体,厢体上设有开门装置,开门装置包括门体和设于门体一侧的导轨,所述导轨竖向设置,导轨上端转动安装第一不完全齿轮,所述第一不完全齿轮固定连接有第一门体安装板,所述导轨上设有竖向设置的导滑槽,所述机架上设置有行走装置,行走装置包括设于机架上的行走电机,行走电机的输出端连接并驱动第一足具和第二足具,通过第一足具和第二足具带动机架和厢体水平移动。
4.但是上述结构中可完成地面上的运输,无法通过已修建的楼梯向楼层内运输材料。
技术实现要素:
5.为了使建筑材料能够通过楼梯运输到楼层内,本技术提供一种环保建筑用运输作业机器人。
6.本技术提供一种环保建筑用运输作业机器人,采用如下的技术方案:
7.一种环保建筑用运输作业机器人,包括机架,机架上设置有厢体,所述机架上设置有行走装置,所述行走装置至少有两组,每个所述行走装置对应一个机架,所述机架上设置有滑轨,滑轨水平设置且滑动连接于两个机架上,所述厢体与滑轨滑动配合且厢体与滑轨之间设置有驱动厢体沿着滑轨移动的驱动装置,所述机架滑动连接在滑轨上且机架与滑轨之间设置有驱动机架沿着滑轨长度方向移动的平动装置,所述行走装置包括升降组件和安装在升降组件下端的履带组件。
8.通过采用上述技术方案,使用时,厢体内装入建筑材料,然后由行走装置带动厢体移动,行走装置在楼梯上时,先由升降组件升高厢体的高度,然后将厢体向后一个行走装置的位置移动,使厢体的重心位于后一个行走装置上,前一个行走装置先由升降组件抬升履带组件,然后由平动装置将机架沿着滑轨向前移动到楼梯的下一个台阶,再将厢体的重心通过驱动装置移动到前一个行走装置上,从而能够使厢体在楼梯上行走并将建筑材料运输到楼层内。
9.优选的,所述升降组件包括竖直螺杆、驱动电机、导向杆和导向套,所述导向套有
两个均竖直设置,导向套的下端连接在履带组件上,一个导向套内滑动连接导向杆,另一个导向套内螺纹连接竖直螺杆,所述导向杆固定在机架上,驱动电机固定在机架上,并且驱动电机的输出轴与竖直螺杆同轴固定设置。
10.通过采用上述技术方案,驱动电机带动竖直螺杆转动,竖直螺杆相对于导向套伸出,从而导向杆也在竖直螺杆内滑动,使升降组件能够升降的同时,提高稳定性。
11.优选的,所述平动装置包括水平螺杆和步进电机,步进电机固定在滑轨上,水平螺杆平行于滑轨设置,水平螺杆同轴固定在步进电机的输出轴上,所述水平螺杆螺纹连接在一个机架上。
12.通过采用上述技术方案,步进电机带动水平螺杆转动时,水平螺杆与机架螺纹连接,从而能够使机架沿着水平螺杆的长度方向移动,进而带动机架上的行走装置相对于滑轨移动。
13.优选的,所述驱动装置包括齿轮、伺服电机和设置有滑轨上的齿条,伺服电机固定在厢体上,齿条平行于滑轨,齿轮同轴固定在伺服电机的输出轴上,所述齿轮与齿条啮合。
14.通过采用上述技术方案,伺服电机工作时,伺服电机带动齿轮转动,由于伺服电机固定在厢体上,从而伺服电机上的齿轮沿着齿条滚动时,厢体相对于滑轨移动,调节厢体的重心位置。
15.优选的,所述厢体上设置有多个滚轮,滚轮转动连接在厢体上,滚轮滚动支撑在滑轨上。
16.通过采用上述技术方案,滚轮转动连接在厢体上,并且滚轮滚动支撑在滑轨上,使滚轮作用在厢体与滑轨之间,减少滑轨与厢体之间的摩擦力。
17.优选的,所述滑轨上开设有燕尾槽,所述机架滑动连接在燕尾槽内。
18.通过采用上述技术方案,滑轨上开设燕尾槽,燕尾槽滑动连接机架,提高机架与滑轨连接牢固性。
19.优选的,所述厢体位于一个机架的一侧设置有开口,所述开口处设置有门体,门体的上侧边转动连接在厢体上。
20.通过采用上述技术方案,厢体上开设有开口,当远离于开口一侧的机架所连接的行走装置升高能够将厢体内的建筑材料倒出。
21.优选的,所述厢体上设置有警示灯。
22.通过采用上述技术方案,厢体上设置警示灯,在工作时,警示灯能够提高周围的工作人员,提高安全性。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过行走装置在楼梯上时,先由升降组件升高厢体的高度,然后将厢体向后一个行走装置的位置移动,前一个行走装置先由升降组件抬升履带组件,然后由平动装置将机架沿着滑轨向前移动到楼梯的下一个台阶,从而能够使厢体在楼梯上行走并将建筑材料运输到楼层内;
25.2.通过驱动电机带动竖直螺杆转动,竖直螺杆相对于导向套伸出,从而导向杆也在竖直螺杆内滑动,使升降组件能够升降的同时,提高稳定性;
26.3.通过伺服电机固定在厢体上,从而伺服电机上的齿轮沿着齿条滚动时,厢体相对于滑轨移动,调节厢体的重心位置。
附图说明
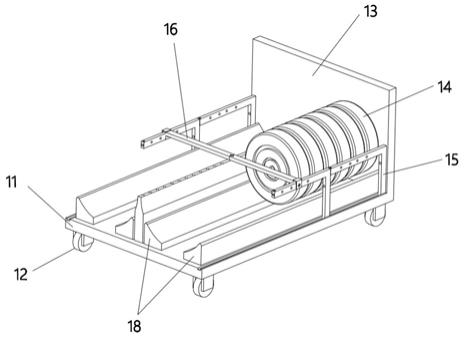
27.图1是本技术实施例的整体结构示意图;
28.图2是图1中a部分的局部放大示意图;
29.图3是本技术实施例的主视图。
30.附图标记说明:1、厢体;11、开口;12、门体;13、转轴;14、滑槽;2、机架;3、行走装置;31、升降组件;311、竖直螺杆;312、驱动电机;313、导向杆;314、导向套;32、履带组件;4、滑轨;41、燕尾槽;5、平动装置;51、水平螺杆;52、步进电机;6、驱动装置;61、齿轮;62、伺服电机;63、齿条;7、警示灯;8、滚轮。
具体实施方式
31.以下结合附图1
‑
3对本技术作进一步详细说明。
32.本技术实施例公开一种环保建筑用运输作业机器人,参考图1,包括厢体1,从厢体1的顶部可以装入砖块,厢体1的下方设置有两个机架2,两个机架2上分别连接有一组行走装置3,行走装置3对机架2进行支撑,两个机架2沿着行走装置3的行走方向前后设置,厢体1安装在机架2上,通过行走装置3能够带动厢体1移动。位于机架2与厢体1之间设置有滑轨4,滑轨4的长度方向沿着行走装置3的行进方向设置,机架2滑动连接在滑轨4上,厢体1滑动连接在滑轨4上。在机架2与滑轨4之间设置有平动装置5,厢体1与滑轨4之间设置有驱动装置6,平动装置5能够调节行走装置3位于滑轨4上的位置,驱动装置6用于调节厢体1位于滑轨4上的位置,从而能够使厢体1的重心位于一组行走装置3的正上方,进而两组行走装置3能够交替支撑厢体1,完成对建筑材料沿着楼梯运输的作业。
33.参考图1和图2,行走装置3包括升降组件31和履带组件32,升降组件31包括竖直螺杆311、驱动电机312、导向杆313和导向套314,每组行走装置3内的导向套314均设置两个,导向套314竖直设置,导向套314的下端与履带组件32固定连接,履带组件32用于水平移动,在一个导向套314的上端插入导向杆313,导向杆313的上端固定在机架2上,导向杆313的横截面设置有方形,在另一个导向套314的上端插入竖直螺杆311,并且竖直螺杆311与导向套314螺纹连接,竖直螺杆311的上端连接驱动电机312,驱动电机312固定在机架2上,驱动电机312的输出轴与竖直螺杆311同轴固定连接,通过驱动电机312带动竖直螺杆311转动时,能够使履带组件32相对于机架2的高度进行调节。在工作时,先通过升降组件31将厢体1的整体高度升高,再将厢体1的重心移动到后一组行走装置3上,前一组行走装置3通过升降组件31抬起履带组件32,从而能够将履带组件32向上移动一个楼梯台阶。同时厢体1设置一组行走装置3的一端开设有开口11,开口11处设置有门体12,门体12的上侧设置有转轴13,转轴13水平设置,从而门体12通过转轴13安装在开口11处,当需要将厢体1内的砖块取出时,远离于开口11一侧的升降组件31将厢体1的一端升高,门体12打开开口11,使砖块由开口11处滑出。
34.参考图1和图2,平动装置5包括水平螺杆51和步进电机52,水平螺杆51平行于滑轨4设置,步进电机52固定在滑轨4上,步进电机52的输出轴与水平螺杆51同轴固定设置,水平螺杆51与机架2螺纹连接,在步进电机52工作时,机架2受到水平螺杆51的作用能够沿着水平螺杆51移动,从而调节机架2上行走装置3相对于滑轨4的位置。在行走装置3抬高后,需要通过平动装置5将机架2沿着滑轨4的长度方向移动,使行走装置3向前移动一个楼梯台阶。
在厢体1上设置有警示灯7,警示灯7工作时能够提醒周围的工作人员,提高安全性。滑轨4的长度方向开设有燕尾槽41,机架2通过燕尾槽41与滑轨4滑动配合,从而能够提高机架2与滑轨4的连接牢固性。
35.参考图1和图3,驱动装置6包括齿轮61、伺服电机62和齿条63,齿条63一体设置在滑轨4上,齿条63的长度方向平行于滑轨4的长度方向,伺服电机62固定在厢体1的侧壁上,并且伺服电机62位于厢体1的中部,齿轮61固定在伺服电机62的输出轴上,齿轮61与齿条63啮合,当滑轨4固定时,通过伺服电机62带动齿轮61转动,从而齿轮61在齿条63的作用下带动厢体1沿着滑轨4的长度方向移动,从而调节厢体1重心的位置。在箱体上开设有滑槽14,滑轨4通过滑槽14滑动连接在厢体1上,并且在滑槽14的上部设置有多个滚轮8,滚轮8转动连接在厢体1上,滚轮8滚动支撑在滑轨4的上侧壁上,从而能够使厢体1与滑轨4之间的摩擦力减少。
36.本实施例的工作过程:
37.先将厢体1沿着滑轨4移动到后一组行走装置3的上方,然后前一组行走装置3通过升降组件31提升履带组件32,然后由平动装置5将前一组行走装置3向前移动使行走装置3落在后一个楼梯台阶上,再将厢体1的重心通过驱动装置6移动到前一组行走装置3上,然后再使后一组行走装置3向前行走一个楼梯台阶,从而完成通过楼梯运输建筑材料的效果。
38.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。