技术特征:
1.一种环保建筑用运输作业机器人,包括机架(2),机架(2)上设置有厢体(1),所述机架(2)上设置有行走装置(3),其特征在于:所述行走装置(3)至少有两组,每个所述行走装置(3)对应一个机架(2),所述机架(2)上设置有滑轨(4),滑轨(4)水平设置且滑动连接于两个机架(2)上,所述厢体(1)与滑轨(4)滑动配合且厢体(1)与滑轨(4)之间设置有驱动厢体(1)沿着滑轨(4)移动的驱动装置(6),所述机架(2)滑动连接在滑轨(4)上且机架(2)与滑轨(4)之间设置有驱动机架(2)沿着滑轨(4)长度方向移动的平动装置(5),所述行走装置(3)包括升降组件(31)和安装在升降组件(31)下端的履带组件(32)。2.根据权利要求1所述的一种环保建筑用运输作业机器人,其特征在于:所述升降组件(31)包括竖直螺杆(311)、驱动电机(312)、导向杆(313)和导向套(314),所述导向套(314)有两个均竖直设置,导向套(314)的下端连接在履带组件(32)上,一个导向套(314)内滑动连接导向杆(313),另一个导向套(314)内螺纹连接竖直螺杆(311),所述导向杆(313)固定在机架(2)上,驱动电机(312)固定在机架(2)上,并且驱动电机(312)的输出轴与竖直螺杆(311)同轴固定设置。3.根据权利要求1所述的一种环保建筑用运输作业机器人,其特征在于:所述平动装置(5)包括水平螺杆(51)和步进电机(52),步进电机(52)固定在滑轨(4)上,水平螺杆(51)平行于滑轨(4)设置,水平螺杆(51)同轴固定在步进电机(52)的输出轴上,所述水平螺杆(51)螺纹连接在一个机架(2)上。4.根据权利要求1所述的一种环保建筑用运输作业机器人,其特征在于:所述驱动装置(6)包括齿轮(61)、伺服电机(62)和设置有滑轨(4)上的齿条(63),伺服电机(62)固定在厢体(1)上,齿条(63)平行于滑轨(4),齿轮(61)同轴固定在伺服电机(62)的输出轴上,所述齿轮(61)与齿条(63)啮合。5.根据权利要求1所述的一种环保建筑用运输作业机器人,其特征在于:所述厢体(1)上设置有多个滚轮(8),滚轮(8)转动连接在厢体(1)上,滚轮(8)滚动支撑在滑轨(4)上。6.根据权利要求1所述的一种环保建筑用运输作业机器人,其特征在于:所述滑轨(4)上开设有燕尾槽(41),所述机架(2)滑动连接在燕尾槽(41)内。7.根据权利要求1所述的一种环保建筑用运输作业机器人,其特征在于:所述厢体(1)位于一个机架(2)的一侧设置有开口(11),所述开口(11)处设置有门体(12),门体(12)的上侧边转动连接在厢体(1)上。8.根据权利要求1所述的一种环保建筑用运输作业机器人,其特征在于:所述厢体(1)上设置有警示灯(7)。
技术总结
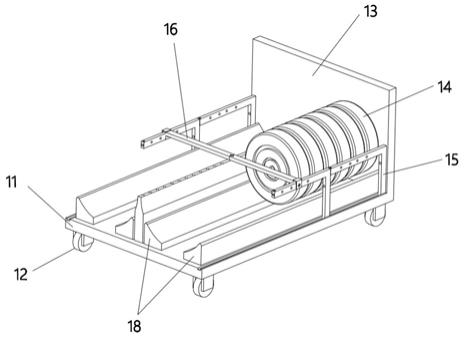
本申请涉及一种建筑材料运输的技术领域,尤其是涉及一种环保建筑用运输作业机器人,其包括机架,机架上设置有厢体,所述机架上设置有行走装置,所述行走装置至少有两组,每个所述行走装置对应一个机架,所述机架上设置有滑轨,滑轨水平设置且滑动连接于两个机架上,所述厢体与滑轨滑动配合且厢体与滑轨之间设置有驱动厢体沿着滑轨移动的驱动装置,所述机架滑动连接在滑轨上且机架与滑轨之间设置有驱动机架沿着滑轨长度方向移动的平动装置,所述行走装置包括升降组件和安装在升降组件下端的履带组件。本申请具有通过楼梯运输建筑材料到楼层内的效果。到楼层内的效果。到楼层内的效果。
技术研发人员:姚淦生 郑坚龙 辛升杰 郑旭明
受保护的技术使用者:深圳市南博工程有限公司
技术研发日:2021.04.30
技术公布日:2021/10/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。