1.本发明涉及一种控制对车辆的开闭体进行开闭驱动的电动马达的旋转的马达控制装置。
背景技术:
2.在专利文献1中示出一种马达控制装置,其在占空比的指令值小于0%的情况下(即,超速的情况下)进行短路制动控制,在1%~互补pwm最大占空的情况下,进行互补脉宽调制(pulse width modulation,pwm)控制,在互补pwm最大占空~100%的情况下,进行无互补pwm控制。在互补pwm控制中,例如两相的通电相中的其中一相的上段开关元件被固定为接通(on),另一相的下段开关元件及上段开关元件分别由pwm信号及互补pwm信号控制。在无互补pwm控制中,所述另一相的上段开关元件被固定为断开(off)。
3.现有技术文献
4.专利文献
5.专利文献1:日本专利特开2018
‑
107960号公报
技术实现要素:
6.发明所要解决的问题
7.例如,在一厢式(one
‑
box)车等车辆中,有时搭载对设置在车身侧部的滑动门(开闭体)进行开闭驱动的电动马达、以及控制电动马达的旋转的马达控制装置。马达控制装置通常以伴随开闭驱动而动力滑动门以预定的速度移动的方式进行速度控制。但是,马达控制装置例如在将停在上坡地的车辆的动力滑动门向开方向驱动这样的情况下,有时无法充分地抑制伴随动力滑动门的重力的加速。
8.因此,例如,考虑使用如专利文献1所示的方式来增加开闭驱动时的制动力。但是,在坡地更陡峭的情况、或驱动重量更重的动力滑动门这样的情况下,即使使用如专利文献1所示的方式,也会担心制动力不足。
9.本发明是鉴于此种情况而完成,其目的之一在于提供一种能够高精度地进行开闭体的速度控制的马达控制装置。
10.解决问题的技术手段
11.本发明的马达控制装置是控制对车辆的开闭体进行开闭驱动的电动马达的旋转的马达控制装置,包括:三相的上段开关元件,分别连接在高电位侧电源和与所述电动马达连接的三相的输出端子之间;三相的下段开关元件,分别连接在所述三相的输出端子和低电位侧电源之间;旋转检测部,检测所述电动马达的旋转位置及旋转速度;速度控制部,基于由所述旋转检测部检测出的所述旋转速度与预定的目标旋转速度的误差,输出pwm占空比的指令值;以及pwm控制部,在对所述开闭体进行开闭驱动时,接收来自所述旋转检测部的所述旋转位置、及来自所述速度控制部的所述指令值,基于依次切换作为所述三相中的两相的通电相、与作为剩余的一相的无通电相的通电模式,对所述三相的上段开关元件及
所述三相的下段开关元件进行pwm控制,且所述pwm控制部具有两相互补pwm控制部,所述两相互补pwm控制部在所述通电相中的一相中,利用pwm信号控制所述上段开关元件或所述下段开关元件的其中一个,利用与所述pwm信号为相反极性的互补pwm信号控制另一个,在所述无通电相中,将所述上段开关元件或所述下段开关元件的其中一个控制为断开,利用所述互补pwm信号控制另一个。
12.在本发明的另一方式中,所述pwm控制部具有单相互补pwm控制部,所述单相互补pwm控制部在所述通电相中的一相中,利用所述pwm信号控制所述上段开关元件或所述下段开关元件的其中一个,利用所述互补pwm信号控制另一个,在所述无通电相中,将所述上段开关元件及所述下段开关元件控制为断开。
13.在本发明的又一方式中,具有通电模式控制部,所述通电模式控制部接收来自所述速度控制部的所述指令值,在基于所述指令值的通电接通的比率相较于第一阈值而降低的情况下,起动所述两相互补pwm控制部来代替所述单相互补pwm控制部,在所述通电接通的比率超过第二阈值的情况下,起动所述单相互补pwm控制部来代替所述两相互补pwm控制部。
14.在本发明的又一方式中,所述第二阈值比所述第一阈值大。
15.在本发明的又一方式中,所述pwm控制部具有无互补pwm控制部,所述无互补pwm控制部在所述通电相中的一相中,利用所述pwm信号控制所述上段开关元件或所述下段开关元件的其中一个,将另一个控制为断开,在所述无通电相中,将所述上段开关元件及所述下段开关元件控制为断开。
16.在本发明的又一方式中,具有通电模式控制部,所述通电模式控制部接收来自所述速度控制部的所述指令值,在基于所述指令值的通电接通的比率相较于第一阈值而降低的情况下,起动所述两相互补pwm控制部来代替所述单相互补pwm控制部,在所述通电接通的比率超过第二阈值的情况下,起动所述单相互补pwm控制部来代替所述两相互补pwm控制部,在所述通电接通的比率超过比所述第二阈值大的第三阈值的情况下,起动所述无互补pwm控制部来代替所述单相互补pwm控制部,在所述通电接通的比率相较于比所述第一阈值大的第四阈值而降低的情况下,起动所述单相互补pwm控制部来代替所述无互补pwm控制部。
17.在本发明的又一方式中,所述第二阈值比所述第一阈值大,所述第三阈值比所述第四阈值大。
18.本发明的马达控制装置是控制对车辆的开闭体进行开闭驱动的电动马达的旋转的马达控制装置,包括:三相的上段开关元件,分别连接在高电位侧电源和与所述电动马达连接的三相的输出端子之间;三相的下段开关元件,分别连接在所述三相的输出端子和低电位侧电源之间;以及pwm控制部,在将所述开闭体的位置固定在开闭中途的位置时,基于将所述三相中的两相作为通电相、将剩余的一相作为无通电相的通电图案,对所述三相的上段开关元件及所述三相的下段开关元件进行pwm控制,由此将所述电动马达的旋转位置固定为与所述通电相的通电方向对应的朝向,且所述pwm控制部具有位置固定pwm控制部,所述位置固定pwm控制部在所述通电相中的一相中,利用pwm信号控制所述上段开关元件或所述下段开关元件的其中一个,利用与所述pwm信号为相反极性的互补pwm信号控制另一个,在所述无通电相中,将所述上段开关元件或所述下段开关元件的其中一个控制为断开,
利用所述互补pwm信号控制另一个。
19.在本发明的又一方式中,包括:旋转检测部,检测所述电动马达的旋转位置及旋转速度;以及速度控制部,基于由所述旋转检测部检测出的所述旋转速度与预定的目标旋转速度的误差,输出pwm占空比的指令值,所述pwm控制部具有两相互补pwm控制部,在对所述开闭体进行开闭驱动时,接收来自所述旋转检测部的所述旋转位置、及来自所述速度控制部的所述指令值,基于依次切换所述通电相及所述无通电相的通电模式,对所述三相的上段开关元件及所述三相的下段开关元件进行pwm控制,且所述两相互补pwm控制部在所述通电相中的一相中,利用所述pwm信号控制所述上段开关元件或所述下段开关元件的其中一个,利用所述互补pwm信号控制另一个,在所述无通电相中,将所述上段开关元件或所述下段开关元件的其中一个控制为断开,利用所述互补pwm信号控制另一个。
20.发明的效果
21.根据本发明,在马达控制装置中,能够高精度地进行开闭体的速度控制。
附图说明
22.[图1]是表示搭载本发明实施方式1的马达控制装置的车辆的概略结构例的侧面图。
[0023]
[图2]是表示图1中的动力滑动门装置的结构例的平面图。
[0024]
[图3]是表示图2中的驱动单元的结构例的正面图。
[0025]
[图4]是表示图3中的卷筒的结构例的立体图。
[0026]
[图5]是表示图2中的ecu周围的主要部分的结构例的概略图。
[0027]
[图6]是表示图5中的三相逆变电路的结构例的电路图。
[0028]
[图7]是表示图5中的pwm控制部的主要部分的结构例的概略图。
[0029]
[图8]是表示图7中的单相互补pwm控制部在cw时的运行例的时序图。
[0030]
[图9]是表示图7中的单相互补pwm控制部在ccw时的运行例的时序图。
[0031]
[图10](a)是表示图8中的pwm接通期间的运行例的示意图,(b)是表示图8中的pwm断开期间的运行例的示意图。
[0032]
[图11](a)是表示与图10(a)不同的pwm接通期间的运行例的示意图,(b)是表示与图10(b)不同的pwm断开期间的运行例的示意图。
[0033]
[图12]是表示图7中的无互补pwm控制部在cw时的运行例的时序图。
[0034]
[图13]是表示图7中的两相互补pwm控制部在cw时的运行例的时序图。
[0035]
[图14]是表示图7中的两相互补pwm控制部在ccw时的运行例的时序图。
[0036]
[图15](a)是表示图13中的pwm接通期间的运行例的示意图,(b)是表示图13中的pwm断开期间的运行例的示意图。
[0037]
[图16](a)是表示与图15(a)不同的pwm接通期间的运行例的示意图,(b)是表示与图15(b)不同的pwm断开期间的运行例的示意图。
[0038]
[图17]是表示图5中的通电模式控制部的主要部分的运行例的状态转换图。
[0039]
[图18]是表示在本发明实施方式2的马达控制装置中,图5中的pwm控制部的主要部分的结构例的概略图。
[0040]
[图19](a)是表示图18中的位置固定pwm控制部的运行例的时序图,(b)是表示伴
随图19(a)的运行的马达电流的一例的示意图。
[0041]
[图20](a)是表示图19(a)及图19(b)中的pwm接通期间的运行例的示意图,(b)是表示图19(a)及图19(b)中的pwm断开期间的运行例的示意图。
[0042]
[图21]是说明使用作为比较例的马达控制装置时的问题点的一例的图。
具体实施方式
[0043]
以下,使用附图对本发明的实施方式进行详细说明。
[0044]
(实施方式1)
[0045]
《动力滑动门装置的概略》
[0046]
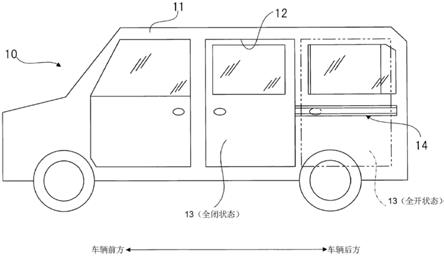
图1是表示搭载本发明实施方式1的马达控制装置的车辆的概略结构例的侧面图。图2是表示图1中的动力滑动门装置的结构例的平面图。图1所示的车辆10例如是一厢式车。在形成车辆10的车身11的侧部,设置有沿着导轨14将开口部12开闭的滑动门(开闭体)13。如图2所示,在滑动门13上连结辊组件13a。辊组件13a与滑动门13一起沿着固定在车身11侧部的导轨14移动。
[0047]
其结果,滑动门13如图1及图2所示,通过在“全闭位置”与“全开位置”之间沿车辆10的前后方向移动来将开口部12开闭。此处,在导轨14的车辆10的前方侧的部分,如图2所示,设置向车室内侧(图中上侧)弯曲的引入部14a。辊组件13a被引入部14a引导,由此滑动门13将开口部12堵塞,并且相对于车身11的侧面而被收入同一面。此外,详细而言,除了此种设置在车身11的中央部的导轨14之外,在车身11的上下部也分别设置导轨(未图示)。
[0048]
在图2中,在车辆10上搭载自动地开闭滑动门13的动力滑动门装置20。在本例中,动力滑动门装置20是缆线式的开闭装置,包括驱动单元21、开侧缆线22a、闭侧缆线22b、以及作为马达控制装置的电子控制单元(electronic control unit,ecu)31。驱动单元21例如配置在车身11的车室内,且配置在导轨14的延伸方向的大致中央部,使用电动马达(以下简称为马达)mt对滑动门13进行开闭驱动。ecu(马达控制装置)31控制马达mt的旋转。
[0049]
开侧缆线22a及闭侧缆线22b均经由辊组件13a与滑动门13连结,承担将驱动单元21的动力传递至滑动门13的功能。具体而言,开侧缆线22a经由位于车辆10的后方侧的第一反转滑轮(pulley)23a被引入至驱动单元21的内部,闭侧缆线22b经由位于车辆10的前方侧的第二反转滑轮23b被引入至驱动单元21的内部。由此,驱动单元21通过卷绕开侧缆线22a来将滑动门13向开方向驱动,通过卷绕闭侧缆线22b来将滑动门13向闭方向驱动。
[0050]
图3是表示图2中的驱动单元的结构例的正面图,图4是表示图3中的卷筒的结构例的立体图。图3所示的驱动单元21包括包含塑料等树脂材料的壳体30。壳体30还作为支撑构成驱动单元21的各构件或机构的框架发挥功能。驱动单元21经由设置于壳体30的四处固定部fp,利用螺栓等(未图示)固定于车身11(参照图1、图2)。
[0051]
在壳体30上设置作为驱动单元21的动力源的马达mt。马达mt例如是能够沿正反方向旋转的扁平形状的无刷马达。通过使用无刷马达,能够抑制驱动单元21的厚度尺寸的增大。在壳体30的内部且马达mt的附近设置包括行星齿轮减速机的减速机构(未图示)。减速机构通过以规定的比率对马达mt的旋转进行减速来实现高转矩化,并利用此高转矩化的驱动力使输出轴32旋转。另外,在壳体30的大致中心部分设置形成为大致圆筒形状的卷筒收容室30a。卷筒收容室30a相对于马达mt而配置在同轴上,卷筒33旋转自如地收容在其内部。
[0052]
如图4所示,卷筒33形成为在外周面具有螺旋状的引导槽33a的大致圆柱形状,其轴心固定在突出至卷筒收容室30a内的输出轴32上。开侧缆线22a(闭侧缆线22b也同样)的一端通过卡止块34固定在卷筒33上。开侧缆线22a在卷筒33逆时针地(向ccw方向)旋转的情况下,自轴向的其中一侧沿着引导槽33a卷绕。闭侧缆线22b在卷筒33顺时针地(向cw方向)旋转的情况下,自轴向的另一侧沿着引导槽33a卷绕。
[0053]
在图3中,在卷筒收容室30a的背侧的部分,且在靠近开侧张紧器机构40a及闭侧张紧器机构40b的部分(图中下部)设置基板收容室(未图示)。在基板收容室中,收容控制马达mt的旋转且与图2的ecu(马达控制装置)31相当的控制基板。控制基板(ecu31)经由连接器连接部35a、35b,与搭载于车辆10的电池(电源)或车室内的操作开关等电连接。
[0054]
此处,控制基板(ecu31)根据操作开关的“开操作”而逆时针地(向ccw方向)对马达mt进行旋转驱动。伴随于此,输出轴32及卷筒33逆时针地以高扭矩旋转,开侧缆线22a一边牵引滑动门13一边卷绕于卷筒33。其结果,滑动门13被自动地控制为开方向。此时,闭侧缆线22b自卷筒33被送出至壳体30的外部。
[0055]
同样地,控制基板(ecu31)根据操作开关的“闭操作”而顺时针地(向cw方向)对马达mt进行旋转驱动。伴随于此,输出轴32及卷筒33顺时针地以高扭矩旋转,闭侧缆线22b一边牵引滑动门13一边卷绕于卷筒33。其结果,滑动门13被自动地控制为闭方向。此时,开侧缆线22a自卷筒33被送出至壳体30的外部。此外,各缆线22a、22b在驱动单元21的出入口与反转滑轮23a、23b(参照图2)之间的区间被具有挠性的外管tu覆盖,并在其内部移动。
[0056]
在壳体30上,与卷筒收容室30a邻接地设置有开侧张紧器收容室30b及闭侧张紧器收容室30c。开侧张紧器收容室30b及闭侧张紧器收容室30c分别收容对开侧缆线22a及闭侧缆线22b施加规定的张力的开侧张紧器机构40a及闭侧张紧器机构40b。开侧张紧器机构40a及闭侧张紧器机构40b分别包括以滑轮轴45为基准旋转的滑轮46以及按压滑轮46的螺旋弹簧(弹性构件)44。
[0057]
开侧缆线22a在卷绕在开侧张紧器机构40a的滑轮46上后,卷绕在卷筒33上。同样地,闭侧缆线22b在卷绕在闭侧张紧器机构40b的滑轮46上后,卷绕在卷筒33上。此时,开侧张紧器机构40a及闭侧张紧器机构40b分别通过利用螺旋弹簧44按压滑轮46,来去除开侧缆线22a及闭侧缆线22b的松弛。例如,各缆线22a、22b通过反复牵引重量重的滑动门13,有时缆线长度伸长。各张紧器机构40a、40b去除随着所述缆线长度的伸长而产生的松弛。
[0058]
《ecu(马达控制装置)周围的概略》
[0059]
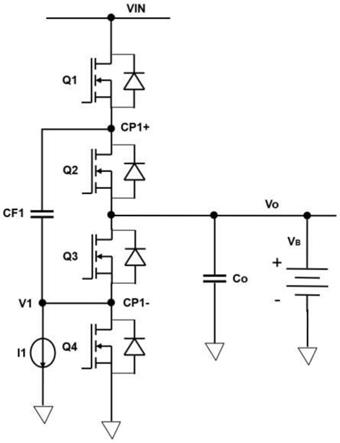
图5是表示图2中的ecu周围的主要部分的结构例的概略图。图6是表示图5中的三相逆变电路的结构例的电路图。图7是表示图5中的pwm控制部的主要部分的结构例的概略图。图5所示的ecu(马达控制装置)31包括马达控制部50及三相逆变电路(马达驱动器)51。如图6所示,三相逆变电路51包括:三相(u相、v相、w相)的上段开关元件swhu、swhv、swhw及回流二极管dhu、dhv、dhw;以及三相的下段开关元件swlu、swlv、swlw及回流二极管dlu、dlv、dlw。
[0060]
三相的上段开关元件swhu、swhv、swhw分别连接在高电位侧电源vdd和与马达mt连接的三相的输出端子outu、outv、outw之间。三相的下段开关元件swlu、swlv、swlw分别连接在三相的输出端子outu、outv、outw和低电位侧电源gnd之间。说明书中,将上段开关元件swhu、swhv、swhw统称为上段开关元件swh,将下段开关元件swlu、swlv、swlw统称为下段开
关元件swl。
[0061]
上段开关元件swh及下段开关元件swl分别例如包括n沟道型金属氧化物半导体场效应晶体管(metal oxide semiconductor field effect transistor,mosfet)、或n沟道型绝缘栅双极晶体管(insulated gate bipolar transistor,igbt)等。回流二极管dhu、dhv、dhw分别与上段开关元件swhu、swhv、swhw逆并联连接,回流二极管dlu、dlv、dlw分别与下段开关元件swlu、swlv、swlw逆并联连接。各回流二极管例如有时通过对应的开关元件的寄生二极管来实现,或有时通过外置的肖特基势垒二极管(schottky barrier diode)等来实现。
[0062]
u相的上段开关元件swhu及下段开关元件swlu分别由成为u相的pwm(脉冲宽度调制)信号pwmu的开关信号uh、ul来控制接通/断开,从而向u相的输出端子outu输出驱动电压vu。同样地,v相的各开关元件swhv、swlv根据成为v相的pwm信号pwmv的开关信号vh、vl,向输出端子outv输出驱动电压vv,w相的各开关元件swhw、swlw根据成为w相的pwm信号pwmw的开关信号vh、vl,向输出端子outw输出驱动电压vw。
[0063]
在图5中,马达控制部50根据来自操作开关osw的信号,生成用于生成三相的驱动电压vu、vv、vw的pwm信号,由此控制马达mt的旋转,从而控制驱动单元21。操作开关osw根据用户的操作,输出用于使滑动门13向开方向移动的开指令信号op、或用于使滑动门13向闭方向移动的闭指令信号cls、或者用于使滑动门13在开闭途中停止的停止指令信号stp。操作开关osw具体而言为驾驶席周围的开关或遥控开关。
[0064]
马达控制部50例如包括包含中央处理器(central processing unit,cpu)的微控制器等,与三相逆变电路51一起安装在构成ecu31的配线基板(控制基板)上。但是,马达控制部50不限于微控制器,也可一部分或全部由现场可编程门阵列(field programmable gate array,fpga)或专用的硬件等构成。即,马达控制部50只要包括由cpu进行的程序处理、或由专用的硬件进行的硬件处理、或其组合即可。
[0065]
马达mt包括转子rt、生成用于使转子rt旋转的磁力的定子stt、以及检测转子rt的旋转位置(旋转角度)的旋转角传感器rs。旋转角传感器rs代表性地为根据转子rt的旋转位置来生成三相的位置检测信号pu、pv、pw的霍尔元件等。但,旋转角度传感器rs并不特别限定于此,也可为旋转变压器(resolver)等。
[0066]
马达控制部50包括旋转检测部55、通电模式控制部56、速度控制部57及pwm控制部58。旋转检测部55基于来自旋转角传感器rs的位置检测信号pu、pv、pw的循环数、频率、相位差等,检测马达mt的旋转位置、旋转速度及旋转方向,进而检测滑动门13的门位置、门移动速度及门开闭方向。即,旋转检测部55与旋转角传感器rs一起作为检测滑动门(开闭体)13的门位置、门移动速度的旋转检测传感器发挥功能。门位置例如作为计数值输出。
[0067]
速度控制部57具有速度控制图60及比例
‑
积分(proportional
‑
integral,pi)补偿器61,控制马达mt的旋转速度,进而控制对滑动门(开闭体)13进行开闭驱动时的移动速度。速度控制图60包含预先确定了滑动门13的门位置(例如计数值)与门目标移动速度(马达mt的目标旋转速度)ω*的对应关系的存储数据,接收来自旋转检测部55的门位置,输出与其对应的门目标移动速度(马达mt的目标旋转速度)ω*。
[0068]
pi补偿器61基于由旋转检测部55检测出的门移动速度(马达mt的旋转速度)ω与来自速度控制图60的门目标移动速度(马达mt的目标旋转速度)ω*的误差,通过比例积分
运算而算出用于使所述误差接近零的pwm占空比(d)。然后,pi补偿器61将所述算出的pwm占空比(d)的指令值67输出至pwm控制部58,并且还输出至通电模式控制部56。
[0069]
通电模式控制部56基于来自操作开关osw的信号及来自速度控制部57的指令值67,自多个通电模式中确定一个通电模式,将表示所述通电模式的通电模式选择信号66输出至pwm控制部58,详细情况将后述。另外,虽然省略了详细情况,但通电模式控制部56还承担包括来自旋转检测部55的各检测信号的异常监视等在内的马达控制部50整体的监视、控制。
[0070]
pwm控制部58接收来自旋转角传感器(旋转检测传感器)rs的位置检测信号pu、pv、pw及来自速度控制部57的指令值67,基于来自通电模式控制部56的通电模式选择信号66所显示的通电模式,通过pwm信号pwmu、pwmv、pwmw来对三相逆变电路51内的各开关元件进行pwm控制。作为对滑动门(开闭体)13进行开关驱动时的通电模式,pwm控制部58使用依次切换作为三相中的两相的通电相及作为剩余的一相的非通电相的所谓的120
°
通电模式。
[0071]
具体而言,如图7的pwm控制部58a所示,pwm控制部58具有无互补pwm控制部70、单相互补pwm控制部71及两相互补pwm控制部72。作为来自通电模式控制部56的通电模式选择信号66,pwm控制部58a接收六个起动信号ncw、nccw、1cw、1ccw、2cw、2ccw。在接收到两个起动信号ncw、nccw的任一个时,起动无互补pwm控制部70。在接收到两个起动信号1cw、1ccw的任一个时,起动单相互补pwm控制部71。在接收到两个起动信号2cw、2ccw的任一个时,起动两相互补pwm控制部72。
[0072]
无互补pwm控制部70在120
°
通电模式下的两相的通电相中的一相中,利用pwm信号控制上段开关元件swh或下段开关元件swl的其中一个,将另一个控制为断开,详细情况将在图12中叙述。另外,无互补pwm控制部70在120
°
通电模式下的单相的无通电相中,将上段开关元件swh及下段开关元件swl控制为断开。在使用此种通电模式使马达mt顺时针地(向cw方向)旋转时,输出起动信号ncw,在使马达mt逆时针地(向ccw方向)旋转时,输出起动信号nccw。
[0073]
单相互补pwm控制部71在120
°
通电模式下的两相的通电相中的一相中,利用pwm信号控制上段开关元件swh或下段开关元件swl的其中一个,且与无互补pwm控制部70的情况不同,利用与pwm信号为相反极性的互补pwm信号控制另一个,详细情况将在图8及图9中叙述。另外,单相互补pwm控制部71在无通电相中,与无互补pwm控制部70的情况同样地,将上段开关元件swh及下段开关元件swl控制为断开。在使用此种通电模式使马达mt向cw方向旋转时,输出起动信号1cw,在使马达mt向ccw方向旋转时,输出起动信号1ccw。
[0074]
两相互补pwm控制部72在120
°
通电模式下的两相的通电相中的一相中,与单相互补pwm控制部71的情况同样地,利用pwm信号控制上段开关元件swh或下段开关元件swl的其中一个,利用互补pwm信号控制另一个,详细情况将在图13及图14中叙述。另外,两相互补pwm控制部72在无通电相中,与单相互补pwm控制部71的情况不同,将上段开关元件或下段开关元件的其中一个控制为断开,利用互补pwm信号控制另一个。在使用此种通电模式使马达mt向cw方向旋转时,输出起动信号2cw,在使马达mt向ccw方向旋转时,输出起动信号2ccw。
[0075]
《单相互补pwm控制部的运行》
[0076]
图8是表示图7中的单相互补pwm控制部在cw时的运行例的时序图。图9是表示图7
中的单相互补pwm控制部在ccw时的运行例的时序图。单相互补pwm控制部71在接收到起动信号1cw的情况下进行图8的运行,在接收到起动信号1ccw的情况下进行图9的运行。一般而言,在120
°
通电模式下,如图8所示,通过两相的通电相与单相的无通电相的组合来预先确定六种通电图案pt1a~pt6a,根据位置检测信号pu、pv、pw依次切换所述六种通电图案pt1a~pt6a。
[0077]
例如,在图8中,单相互补pwm控制部71根据位置检测信号pu的上升沿,选择将u相及v相设为通电相、将w相设为无通电相的通电图案pt1a。另外,单相互补pwm控制部71根据cw时从位置检测信号pu的上升沿起在电气角60
°
后产生的位置检测信号pw的下降沿,选择将u相及w相设为通电相、将v相设为无通电相的通电图案pt2a。
[0078]
进而,单相互补pwm控制部71根据cw时从位置检测信号pw的下降沿起在电气角60
°
后产生的位置检测信号pv的上升沿,选择将v相及w相设为通电相、将u相为无通电相的通电图案pt3a。以后,一边以相同的方式切换通电相及无通电相,一边根据位置检测信号pu的下降沿选择通电图案pt4a,根据位置检测信号pw的上升沿选择通电图案pt5a,根据位置检测信号pv的下降沿选择通电图案pt6a。
[0079]
此处,单相互补pwm控制部71在各通电图案pt1a~pt6a中,将两相的通电相中的一相的上段开关元件swh控制为接通,分别利用pwm信号及互补pwm信号控制剩余的一相的下段开关元件swl及上段开关元件swh。另外,单相互补pwm控制部71在各通电图案pt1a~pt6a中,将无通电相的上段开关元件swh及下段开关元件swl均控制为断开。
[0080]
若以通电图案pt1a为例,则单相互补pwm控制部71通过成为
‘
h’电平的开关信号uh将作为通电相(u相
→
v相)的u相的上段开关元件swhu控制为接通,利用成为pwm信号pwmv的开关信号vl对作为通电相的驱动侧的v相的下段开关元件swlv进行pwm控制。进而,单相互补pwm控制部71利用成为互补pwm信号(/pwmv)的开关信号vh对作为通电相的回流侧的v相的上段开关元件swhv进行pwm控制。
[0081]
此时,单相互补pwm控制部71基于来自速度控制部57的pwm占空比(d)的指令值67,确定pwm周期tpwm中的pwm接通期间ton(通电接通)的比率即pwm占空比(d)。另外,单相互补pwm控制部71通过成为
‘
l’电平的开关信号wh及开关信号wl,将作为无通电相的w相的上段开关元件swhw及下段开关元件swlw均控制为断开。
[0082]
此外,例如在使用微控制器等的情况下,通过计时器(计数器)等来实现单相互补pwm控制部71(无互补pwm控制部70、两相互补pwm控制部72也相同)。另外,在图8的例子中,在通电相中,其中一相的上段开关元件swh被控制为接通,另一相的下段开关元件swl由pwm信号控制,但也可为其中一相的下段开关元件swl被控制为接通,另一相的上段开关元件swh由pwm信号控制。在所述情况下,另一相的下段开关元件swl由互补pwm信号控制。此种切换在说明书中叙述的其他时序图中也同样。
[0083]
在图9中,使用与图8的情况同样的通电图案pt1a~pt6a,但随着马达mt的旋转方向的不同,位置检测信号pu、pv、pw的产生顺序及与其对应的通电图案pt1a~pt6a的选择顺序不同。在图9中,单相互补pwm控制部71与图8的情况相反地,按照通电图案pt6a
→
pt5a
→…→
pt2a
→
pt1a的顺序选择通电图案。
[0084]
图10(a)是表示图8中的pwm接通期间的运行例的示意图,图10(b)是表示图8中的pwm断开期间的运行例的示意图。图10(a)及图10(b)中示出图8的通电图案pt1a的选择区间
内,前半部分的区间(pt1a1)中的运行例。在所述前半部分的区间(pt1a1)中,作为无通电相的w相的感应电压vbf(w)以中间电压vmid(=vdd/2)为基准成为正极( )。
[0085]
在图10(a)的pwm接通期间ton,u相的上段开关元件swhu被控制为接通,v相的下段开关元件swlv由pwm信号pwmv控制为接通,由此,驱动电流iduv以上段开关元件swhu
→
马达mt
→
下段开关元件swlv的路径流动。若将开关元件的接通电阻假定为零,则u相的输出端子outu被箝位至高电位侧电源vdd的电压(为了方便,称为vdd),v相的输出端子outv被箝位至低电位侧电源gnd的电压(例如0v)。
[0086]
其结果,马达mt的中点电压vct大致为vdd/2。作为无通电相的w相的输出端子outw的电压成为对中点电压vct加上w相的感应电压vbf(w)而得的电压,所述电压在vdd~0v的范围内。因此,w相不产生电流路径,w相的输出端子outw断路。
[0087]
在图10(b)的pwm断开期间toff中,v相的下段开关元件swlv通过pwm信号pwmv被控制为断开,取而代之,v相的上段开关元件swhv通过互补pwm信号(/pwmv)被控制为接通。其结果,以蓄积在u相及v相的线圈lu、lv中的电力作为电动势,回流电流iruv以上段开关元件swhu
→
马达mt
→
上段开关元件swhv的路径流动。在所述情况下,v相的输出端子outv被箝位至高电位侧电源vdd的电压,因此马达mt的中点电压vct也大致为vdd。
[0088]
向w相的输出端子outw输出对所述中点电压vct(≒vdd)加上了成为正极( )的w相的感应电压vbf(w)而得的电压。在所述感应电压vbf(w)比w相的回流二极管dhw的正向电压(δv)大的情况下,电流(ibw1)以自马达mt的w相经由回流二极管dhw的路径流动。其结果,w相的输出端子outw的电压被箝位至对高电位侧电源vdd的电压加上回流二极管dhw的正向电压(δv)而得的电压。流过所述w相的输出端子outw的电流在消耗w相的感应电压vbf(w)的方向(换言之,制动旋转的方向)上流动,因此成为制动电流(braking current)ibw1。
[0089]
另外,关于马达mt的u相及v相,也是通过感应电压vbf(u)及感应电压vbf(v),制动电流(braking current)ibvu1在消耗感应电压vbf(u)及感应电压vbf(v)的方向(对旋转进行制动的方向)上流动。所述制动电流ibvu1叠加于回流电流iruv,在减少回流电流iruv的方向上起作用。
[0090]
图11(a)是表示与图10(a)不同的pwm接通期间的运行例的示意图,图11(b)是表示与图10(b)不同的pwm断开期间的运行例的示意图。图11(a)及图11(b)中示出图8的通电图案pt1a的选择区间内,后半部分的区间(pt1a2)中的运行例。在所述后半部分的区间(pt1a2)中,作为无通电相的w相的感应电压vbf(w)以中间电压vmid(=vdd/2)为基准成为负极(
‑
)。
[0091]
在图11(a)的pwm接通期间ton中,进行与图10(a)的情况同样的运行。但是,w相的感应电压vbf(w)的极性与图10(a)的情况不同。在所述情况下,作为无通电相的w相的输出端子outw的电压也与图10(a)的情况同样地,在vdd~0v的范围内。因此,w相不产生电流路径,w相的输出端子outw断路。
[0092]
在图11(b)的pwm断开期间toff中,与图10(b)的情况同样地,回流电流iruv以上段开关元件swhu
→
马达mt
→
上段开关元件swhv的路径流动。其结果,马达mt的中点电压vct与图10(b)的情况同样地,大致为vdd。向w相的输出端子outw输出对所述中点电压vct(≒vdd)加上了成为负极(
‑
)的w相的感应电压vbf(w)而得的电压。其结果,w相的输出端子outw的电压可能会成为比高电位侧电源vdd的电压低的电压。在所述情况下,不流过如图10(b)的情
况那样的制动电流ibw1。此外,关于u相及v相的制动电流ibvu1,与图10(b)的情况同样。
[0093]
《无互补pwm控制部的运行》
[0094]
图12是表示图7中的无互补pwm控制部在cw时的运行例的时序图。无互补pwm控制部70在接收到起动信号ncw的情况下进行图12的运行。在图12中,无互补pwm控制部70与图8的情况同样地,进行根据位置检测信号pu、pv、pw依次切换各通电图案pt1c~pt6c的控制。但是,无互补pwm控制部70在各通电图案pt1c~pt6c中,与图8的情况同样地,利用pwm信号控制两相的通电相中的剩余的一相的下段开关元件swl,但与图8的情况不同,将所述剩余的一相的上段开关元件控制为断开,而非利用互补pwm信号进行控制。
[0095]
例如,若以通电图案pt1c为例,则作为通电相的驱动侧的v相的下段开关元件swlv通过成为pwm信号pwmv的开关信号vl进行pwm控制,但作为通电相的回流侧的v相的上段开关元件swhv通过成为
‘
l’电平的开关信号vh被控制为断开。在使用图12的通电模式(ncw)的情况下,例如关于图10(b)及图11(b)中的w相的制动电流ibw1,与图10(b)及图11(b)的情况同样。
[0096]
另一方面,图10(b)及图11(b)中的回流电流iruv经由回流二极管dhv流动来代替v相的上段开关元件swhv。由于从高电位侧电源vdd朝向v相的输出端子outv的方向的电流路径因v相的上段开关元件swhv的断开而被阻断,因此伴随u相及v相的感应电压vbf(u)、vbf(v)的制动电流ibvu1变得难以流动。
[0097]
其结果,在使用图12所示的无互补pwm的通电模式(ncw)的情况下,与使用图8所示的单相互补pwm控制的通电模式(1cw)的情况相比较,马达mt的制动力变弱。此外,虽然省略图示,但无互补pwm控制部70在接收到起动信号nccw的情况下,与图8及图12的情况同样地,使用将图9中的互补pwm信号(/pwm(u,v,w))的部分变更为
‘
l’电平这样的通电图案运行。
[0098]
《马达控制装置(比较例)的结构及问题点》
[0099]
此处,作为比较例的马达控制装置例如成为在图7中包括短路制动控制部来代替两相互补pwm控制部72的结构。图21(a)及图21(b)是说明使用作为比较例的马达控制装置时的问题点的一例的图。在图21(a)中,在将车辆10停车于陡峭的上坡的状态下,进行滑动门13向开方向的驱动。在图21(b)中,在将车辆10停车于陡峭的下坡的状态下,进行滑动门13向闭方向的驱动。在图21(a)的情况下,由于上坡与重力的关系,滑动门13向开方向加速,在图21(b)的情况下,由于下坡与重力的关系,滑动门13向闭方向加速。
[0100]
在如上所述伴随倾斜而产生滑动门13的加速的情况下,有时无法充分地抑制马达mt的旋转速度ω>马达mt的目标旋转速度ω*的超速,不能高精度地进行滑动门13的速度控制。因此,与专利文献1的情况同样地,可考虑在发生超速的情况下通过短路制动控制部进行短路制动控制。短路制动控制是指通过将三相的上段开关元件swh全部控制为接通,或者将三相的下段开关元件swl全部控制为接通,来构筑消耗马达mt的感应电压的闭环电路,使马达mt减速的控制。
[0101]
但是,若使用短路制动控制,则作用有强的制动力,因此,例如会担心由于所述制动力而检测到滑动门13的夹入等(即产生误检测)。另一方面,若不进行短路制动控制,则在单相互补pwm控制部71(对应于专利文献1的互补pwm控制)中,特别是在滑动门13的重量重的情况下,有时制动力不足,不能高精度地进行速度控制。即,若为了弥补伴随单相互补pwm控制部71的制动力不足而使用短路制动控制部,则有时制动力会过剩。另外,在单相互补
pwm控制部71及短路制动控制部,除了此种制动力的强度之外,控制方法也大为不同,因此担心会导致控制的复杂化等。
[0102]
《两相互补pwm控制部的运行》
[0103]
图13是表示图7中的两相互补pwm控制部在cw时的运行例的时序图。图14是表示图7中的两相互补pwm控制部在ccw时的运行例的时序图。两相互补pwm控制部72在接收到起动信号2cw的情况下进行图13的运行,在接收到起动信号2ccw的情况下进行图14的运行。在图13及图14中,与图8及图9中叙述的单相互补pwm控制部71的情况同样地,两相互补pwm控制部72进行根据位置检测信号pu、pv、pw依次切换各通电图案pt1b~pt6b的控制。
[0104]
即,在图13及图14所示的各通电图案pt1b~pt6b中,两相互补pwm控制部72将两相的通电相中的一相的上段开关元件swh控制为接通,分别利用pwm信号及互补pwm信号控制剩余的一相的下段开关元件swl及上段开关元件swh。其中,两相互补pwm控制部72在无通电相中,与图8及图9的情况同样地,将下段开关元件swl控制为断开,但与图8及图9的情况不同,利用互补pwm信号控制上段开关元件swh而非断开。
[0105]
若以图13的通电图案pt1b为例,则两相互补pwm控制部72通过成为
‘
h’电平的开关信号uh将作为通电相(u相
→
v相)的u相的上段开关元件swhu控制为接通,利用成为pwm信号pwmv的开关信号vl对作为通电相的驱动侧的v相的下段开关元件swlv进行pwm控制。另外,两相互补pwm控制部72利用成为互补pwm信号(/pwmv)的开关信号vh对作为通电相的回流侧的v相的上段开关元件swhv进行pwm控制。
[0106]
进而,两相互补pwm控制部72通过成为
‘
l’电平的开关信号wl控制作为无通电相的w相的下段开关元件swlw,另一方面,利用成为互补pwm信号(/pwmv)的开关信号wh对w相的上段开关元件swhw进行pwm控制。互补pwm信号(/pwmv)是在v相的上段开关元件swhv中使用的信号,w相的上段开关元件swhw由与所述v相的互补pwm信号(/pwmv)相同的信号控制。
[0107]
图15(a)是表示图13中的pwm接通期间的运行例的示意图,图15(b)是表示图13中的pwm断开期间的运行例的示意图。图15(a)及图15(b)中示出图13的通电图案pt1b的选择区间内,前半部分的区间(pt1b1)中的运行例。在所述前半部分的区间(pt1b1)中,作为无通电相的w相的感应电压vbf(w)以中间电压vmid(=vdd/2)为基准成为正极( )。
[0108]
在图15(a)的pwm接通期间ton中,w相的上段开关元件swhw通过互补pwm信号(/pwmv)而被控制为断开,因此进行与图10(a)中的单相互补pwm控制部71的情况同样的运行。另一方面,在图15(b)的pwm断开期间toff中,与图10(b)的情况不同,w相的上段开关元件swhw通过互补pwm信号(/pwmv)而被控制为接通。由此,w相的输出端子outw经由w相的上段开关元件swhw被箝位至高电位侧电源vdd的电压。
[0109]
其结果,在w相中,根据感应电压vbf(w),经由w相的上段开关元件swhw立即流过制动电流ibw2。另一方面,在图10(b)的情况下,在w相中,限于感应电压vbf(w)比回流二极管dhw的正向电压(δv)大的情况(即,马达mt的旋转速度快的情况)而经由回流二极管dhw流动制动电流ibw1。因此,制动电流ibw2的大小还包括上段开关元件swhw与回流二极管dhw的接通电阻的不同在内,相较于制动电流ibw1而言足够大。此外,关于u相及v相的制动电流ibvu1,与图10(b)的情况同样。
[0110]
图16(a)是表示与图15(a)不同的pwm接通期间的运行例的示意图,图16(b)是表示与图15(b)不同的pwm断开期间的运行例的示意图。图16(a)及图16(b)中示出图13的通电图
案pt1b的选择区间内,后半部分的区间(pt1b2)中的运行例。在所述后半部分的区间(pt1b2)中,作为无通电相的w相的感应电压vbf(w)以中间电压vmid(=vdd/2)为基准成为负极(
‑
)。
[0111]
在图16(a)的pwm接通期间ton中,进行与图15(a)的情况同样的运行。但是,w相的感应电压vbf(w)的极性与图15(a)的情况不同。另一方面,在图16(b)的pwm断开期间toff中,与图11(b)中的单相互补pwm控制部71的情况不同,w相的上段开关元件swhw通过互补pwm信号(/pwmv)而被控制为接通。由此,w相的输出端子outw经由w相的上段开关元件swhw被箝位至高电位侧电源vdd的电压。
[0112]
其结果,在w相中,根据感应电压vbf(w),经由w相的上段开关元件swhw立即流过制动电流ibw3。另一方面,在图11(b)的情况下,在w相中,上段开关元件swhw断开,因此从高电位侧电源vdd朝向输出端子outw的方向的电流路径被阻断,不流过制动电流。此外,关于u相及v相的制动电流ibvu1,与图11(b)的情况同样。
[0113]
如从以上的说明可知,在使用图13及图14所示的两相互补pwm控制的通电模式(2cw、2ccw)的情况下,与使用图8及图9所示的单相互补pwm控制的通电模式(1cw、1ccw)的情况相比较,马达mt的制动力变强。其结果,即使不使用图21(a)及图21(b)中说明的作为比较例的马达控制装置那样的短路制动控制,也可充分地制动马达mt,能够高精度地进行滑动门13的速度控制。
[0114]
另外,制动力的强度为:短路制动控制>两相互补pwm控制>单相互补pwm控制。因此,若使用两相互补pwm控制来代替短路制动控制,则可以单相互补pwm控制为基准获得不过剩的适当的制动力,可防止滑动门13的夹入等误检测。进而,与短路制动控制及单相互补pwm控制的情况相比较,两相互补pwm控制及单相互补pwm控制的制动力及控制方法的背离小,因此可实现控制的容易化。
[0115]
进而,例如在图13所示的两相互补pwm控制的通电模式下,若减小pwm占空比(d),则结果会接近三相的上段开关元件swh全部接通的状态。所述三相的上段开关元件swh全部接通的状态是与短路制动控制的情况相同的状态。因此,若使用两相互补pwm控制,则实质上能够朝向短路制动控制时获得的制动力连续地对制动力进行可变控制。
[0116]
《通电模式控制部的运行》
[0117]
图17是表示图5中的通电模式控制部的主要部分的运行例的状态转换图。在图17中,当接收到来自操作开关osw的闭指令信号cls时,通电模式控制部56转移至cw方向的单相互补pwm模式(s1a)。与此相应地,通电模式控制部56通过向pwm控制部58输出起动信号1cw而起动单相互补pwm控制部71。在所述状态下,通电模式控制部56接收来自速度控制部57的pwm占空比(d)的指令值67。
[0118]
并且,当基于指令值67的通电接通的比率(即pwm占空比(d))相较于阈值(第一阈值)du2而降低时,通电模式控制部56转换为cw方向的两相互补pwm模式(s2a)。在所述情况下,通电模式控制部56通过向pwm控制部58输出起动信号2cw而起动两相互补pwm控制部72来代替单相互补pwm控制部71。
[0119]
另一方面,当在cw方向的两相互补pwm模式(s2a)的状态下,基于指令值67的pwm占空比(d)超过阈值(第二阈值)dd2时,通电模式控制部56转换为cw方向的单相互补pwm模式(s1a)。在所述情况下,通电模式控制部56通过向pwm控制部58输出起动信号1cw而起动单相
互补pwm控制部71来代替两相互补pwm控制部72。
[0120]
另外,当在cw方向的单相互补pwm模式(s1a)的状态下,基于指令值67的pwm占空比(d)超过比阈值(第二阈值)dd2大的阈值(第三阈值)dd1的情况下,通电模式控制部56转换为cw方向的无互补pwm模式(s0a)。在所述情况下,通电模式控制部56通过向pwm控制部58输出起动信号ncw而起动无互补pwm控制部70来代替单相互补pwm控制部71。
[0121]
另一方面,当在cw方向的无互补pwm模式(s0a)的状态下,基于指令值67的pwm占空比(d)相较于比阈值(第一阈值)du2大的阈值(第四阈值)du1而降低时,通电模式控制部56转换为cw方向的单相互补pwm模式(s1a)。在所述情况下,通电模式控制部56通过向pwm控制部58输出起动信号1cw而起动单相互补pwm控制部71来代替无互补pwm控制部70。
[0122]
同样地,当接收到来自操作开关osw的开指令信号op时,通电模式控制部56转移至ccw方向的单相互补pwm模式(s1b)。之后,通电模式控制部56接收来自速度控制部57的pwm占空比(d)的指令值67,基于与所述cw方向的情况同样的各阈值,在ccw方向的单相互补pwm模式(s1b)、两相互补pwm模式(s2b)、无互补pwm模式(s0b)之间进行状态转换。
[0123]
此处,pwm占空比(d)的值越小,则意味着不需要驱动力,反之则意味着需要大的制动力。因此,在需要大的制动力的情况下,使用两相互补pwm模式(s2a、s2b)。另一方面,pwm占空比(d)的值越大,则意味着需要驱动力,反之则意味着不需要制动力。因此,在不需要制动力的情况下,使用无互补pwm模式(s0a、s0b)。
[0124]
另外,在此例中,阈值(第二阈值)dd2(例如,45%)被设定为比阈值(第一阈值)du2(例如,35%)大的值,阈值(第三阈值)dd1(例如,65%)被设定为比阈值(第四阈值)du1(例如55%)大的值。通过如上所述使阈值具有滞后(hysteresis)特性,从而能够防止通电模式的频繁切换,使控制稳定。例如,在pwm占空比(d)暂时较35%降低之后,在所述35%左右发生变动这样的情况下,可不切换为单相互补pwm模式(s1a、s1b),而维持两相互补pwm模式(s2a、s2b)下的运行。
[0125]
此外,通电模式控制部56也可代替pwm占空比(d)的指令值67,进行如下的控制,例如使用计时器等判定旋转速度ω超过目标旋转速度ω*的状态是否持续了规定的期间,在持续了规定的期间的情况下,转换为制动力更强的通电模式。在使用此种方式的情况下,也能进行与使用指令值67的情况大致同样的控制。即,伴随pi补偿,根据马达mt的旋转速度ω与目标旋转速度ω*的误差的大小、以及伴随积分延迟的所述误差持续了何种程度的期间,指令值67的值发生变化。
[0126]
《实施方式1的主要效果》
[0127]
以上,通过使用实施方式1的马达控制装置,能够高精度地进行开闭体的速度控制。特别是在开闭体的重量重的情况下,也能高精度地进行开闭体的速度控制。另外,无需使用短路制动控制那样的复杂控制,可简化控制。
[0128]
(实施方式2)
[0129]
《作为前提的问题点》
[0130]
在实施方式1中,说明了对滑动门13进行开闭驱动时的控制,但在实施方式2中,对将滑动门13的位置固定在开闭中途的位置时的控制进行说明。例如,如图21(a)及图21(b)所示,假设在使车辆10停车于坡地的状态下开闭滑动门13并且在所述开闭中途的位置停止,将滑动门13的位置(即马达mt的旋转位置)固定在所述开闭中途的位置的情况。
[0131]
作为此时的控制方式,可列举短路制动控制。若使用短路制动控制,则不流过贯通电流,因此能够以少的功耗固定马达mt的旋转位置。但是,就在产生滑动门13的加速的坡地固定马达mt的旋转位置的方面而言,担心制动力不足。因此,作为其他的控制方式,可列举对三相中的预定的两相固定地进行通电的单相通电控制。若使用单相通电控制,则可获得强的制动力。但是,会担心固定旋转位置时的功耗增加。
[0132]
《pwm控制部的结构》
[0133]
图18是表示在本发明实施方式2的马达控制装置中,图5中的pwm控制部的主要部分的结构例的概略图。图18的pwm控制部58b在将滑动门(开闭体)13的位置(马达mt的旋转位置)固定在开闭中途时,基于将三相中的两相设为通电相、将剩余的一相设为无通电相的通电图案,对三相的上段开关元件swh及三相的下段开关元件swl进行pwm控制。即,pwm控制部58b使用在120
°
通电模式下使用的六个通电图案中的预定的一个,向马达mt继续进行通电。由此,pwm控制部58b将马达mt的旋转位置固定为与通电相的通电方向对应的朝向。
[0134]
具体而言,图18的pwm控制部58b构成为,相对于图7的结构例,追加了位置固定pwm控制部75。位置固定pwm控制部75根据通电模式选择信号66中的起动信号fx来起动。图5的通电模式控制部56例如在接收到来自操作开关osw的停止指令信号stp时,或者在由于未图示的各种保护功能而产生使马达mt在开闭中途强制停止的必要性的情况下,向pwm控制部58b输出起动信号fx。
[0135]
《位置固定pwm控制部的运行》
[0136]
图19(a)是表示图18中的位置固定pwm控制部的运行例的时序图,图19(b)是表示伴随图19(a)的运行的马达电流的一例的示意图。位置固定pwm控制部75在两相的通电相中的一相中,利用pwm信号控制上段开关元件swh或下段开关元件swl的其中一个,利用互补pwm信号控制另一个。另外,位置固定pwm控制部75在无通电相中,将上段开关元件swh或下段开关元件swl的其中一个控制为断开,利用互补pwm信号控制另一个。
[0137]
在图19(a)的例子中,使用与图13所示的两相互补pwm控制中使用的从u相向v相的通电图案pt1b相同的通电图案pt1d。此外,当然还能够使用其他通电图案pt2b~pt6b中的任一个。此处,在通过单相通电控制来固定马达mt的旋转位置的情况下,例如,可考虑使用图8所示的单相互补pwm控制的通电图案pt1a、或图12所示的无互补pwm控制的通电图案pt1c,但在此处,使用两相互补pwm控制的通电图案pt1b。
[0138]
在图19(b)中,在pwm接通期间ton,驱动电流iduv从u相的上段开关元件swhu经由马达mt向v相的下段开关元件swlv流动。另一方面,在pwm断开期间toff,回流电流iruv从u相的上段开关元件swhu经由马达mt向v相的上段开关元件swhv流动。所述驱动电流iduv与回流电流iruv的平均电流成为马达电流imt。另外,pwm占空比(d)还能够预先确定,或者,在图5中,通过将目标旋转速度ω*设定为零而由速度控制部57生成。
[0139]
图20(a)是表示图19(a)及图19(b)中的pwm接通期间的运行例的示意图,图20(b)是表示图19(a)及图19(b)中的pwm断开期间的运行例的示意图。在图20(a)的pwm接通期间ton,驱动电流iduv从u相的上段开关元件swhu经由马达mt向v相的下段开关元件swlv流动。根据所述驱动电流iduv的朝向而产生磁通φuv,转子rt沿着所述磁通φuv的朝向被固定。驱动电流iduv(磁通φuv)越大,则固定转子rt的力(即制动力)越强。
[0140]
在图20(b)的pwm断开期间toff,回流电流iruv从u相的上段开关元件swhu经由马
达mt向v相的上段开关元件swhv流动。通过伴随所述回流电流iruv的磁通φuv,转子rt的固定状态得以维持。此处,在假如制动力不足而转子rt旋转的情况下,各相中会产生感应电压。此时,如实施方式1(图15、图16等)中所述,在作为无通电相的w相中,在使用单相互补pwm控制的情况下,难以充分地流过制动电流,但在使用两相互补pwm控制的情况下,可充分地流过制动电流ibw4。
[0141]
如上所述,通过在固定马达mt的旋转位置时使用两相互补pwm控制,与使用单相互补pwm控制的情况相比较,可获得强的制动力,因此,在结果方面,可使驱动电流iduv(pwm占空比(d))较使用单相互补pwm控制的情况更小。另外,通过使用两相互补pwm控制,与使用无互补pwm控制的情况相比较,可获得更强的制动力,且也不会产生伴随回流电流iruv的二极管损耗,因此可使驱动电流iduv(pwm占空比(d))较使用无互补pwm控制的情况更小。
[0142]
《实施方式2的主要效果》
[0143]
以上,通过使用实施方式2的马达控制装置,能够降低固定马达的旋转位置时的功耗。特别是在开闭体的重量重的情况下,也可实现低功耗化。
[0144]
本发明不限于所述实施方式,当然可在不脱离其主旨的范围内进行各种变更。例如,在所述实施方式中,例示了应用于动力滑动门的例子,但同样地能够应用于以包括动力尾门(power tail gate)、动力窗等的各种开闭体为对象的所有马达控制装置。其中,尤其是应用于开闭体的重量大,容易受到停车时的倾斜状态的影响的动力滑动门或动力尾门更为有益。
[0145]
此外,所述各实施方式中的各结构要素的材质、形状、尺寸、数量、设置部位等只要可达成本发明则为任意,并不限定于所述各实施方式。
[0146]
符号的说明
[0147]
10:车辆
[0148]
11:车身
[0149]
12:开口部
[0150]
13:滑动门(开闭体)
[0151]
13a:辊组件
[0152]
14:导轨
[0153]
14a:引入部
[0154]
20:动力滑动门装置
[0155]
21:驱动单元
[0156]
22a:开侧缆线
[0157]
22b:闭侧缆线
[0158]
23a:第一反转滑轮
[0159]
23b:第二反转滑轮
[0160]
30:壳体
[0161]
30a:卷筒收容室
[0162]
30b:开侧张紧器收容室
[0163]
30c:闭侧张紧器收容室
[0164]
31:ecu(马达控制装置)
[0165]
32:输出轴
[0166]
33:卷筒
[0167]
33a:引导槽
[0168]
34:卡止块
[0169]
35a、35b:连接器连接部
[0170]
40a:开侧张紧器机构
[0171]
40b:闭侧张紧器机构
[0172]
44:螺旋弹簧
[0173]
45:滑轮轴
[0174]
46:滑轮
[0175]
50:马达控制部
[0176]
51:三相逆变电路
[0177]
55:旋转检测部
[0178]
56:通电模式控制部
[0179]
57:速度控制部
[0180]
58、58a、58b:pwm控制部
[0181]
60:速度控制图
[0182]
61:pi补偿器
[0183]
66:通电模式选择信号
[0184]
67:指令值
[0185]
70:无互补pwm控制部
[0186]
71:单相互补pwm控制部
[0187]
72:两相互补pwm控制部
[0188]
75:位置固定pwm控制部
[0189]
fp:固定部
[0190]
gnd:低电位侧电源
[0191]
mt:马达
[0192]
ncw、nccw、1cw、1ccw、2cw、2ccw、fx:起动信号
[0193]
osw:操作开关
[0194]
outu、outv、outw:输出端子
[0195]
pt1~pt6:通电图案
[0196]
pwmu、pwmv、pwmw:pwm信号
[0197]
/pwmu、/pwmv、/pwmw:互补pwm信号
[0198]
pu、pv、pw:位置检测信号
[0199]
rs:旋转角传感器
[0200]
rt:转子
[0201]
stt:定子
[0202]
swh:上段开关元件
[0203]
swl:下段开关元件
[0204]
tu:外管
[0205]
vdd:高电位侧电源
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。