1.本发明涉及一种磁性位置测量装置,该磁性位置测量装置适合于两个对象的位置测量,所述两个对象沿着至少一个测量方向相对彼此可运动地布置。
背景技术:
2.磁性位置测量装置通常包括磁性标尺(该磁性标尺交替地由以栅尺度p布置的带有不同的磁化部的标尺区域构成)以及沿至少一个测量方向相对于该磁性标尺可运动的采样单元(或扫描单元,即abtasteinheit)。在此,栅尺度p规定标尺区域沿着测量方向的延展。在采样单元的侧面上尤其设置有探测器组件,所述探测器组件具有适合的磁场敏感的探测器元件。在此,将条形构造的磁阻的薄层、例如带有各向异性的磁阻的坡莫合金
‑
层考虑作为探测器元件。这意味着,在存在外部的磁场的情况下探测器元件中的电阻改变。在探测器元件中产生的电阻改变在此是外部的磁场的函数,其中,随着磁场强度增加,这种探测器元件的特征线经受失真。特征线的失真那么导致探测器元件的输出信号也取决于标尺
‑
磁场的振幅地具有失真并且对位置测量的精度产生不利影响。这种失真在下面被称为测量信号
‑
基本频率的谐波或高次谐波,该测量信号
‑
基本频率由标尺的栅尺度p得到。
3.为了消除磁性位置测量装置中的这种高次谐波,已知一系列解决方案。在此,通常根据要过滤的高次谐波,在采样侧的探测器组件中设置探测器元件的特定的几何布置结构。
4.jp 10
‑
185507 a例如为了过滤不期望的三次谐波而提出在探测器组件中的探测器基本单体的特定构造,所述探测器基本单体包括三个条形的、磁阻的探测器元件,所述探测器元件沿测量方向相对彼此间隔开地布置;探测器元件的纵向方向在此分别垂直于测量方向定向。相邻的探测器元件沿着测量方向具有p/8的间距,其中,p说明带有相反的磁化部的标尺区域的栅尺度。探测器基本单体的中间的探测器以长度l1具有比两个外部的探测器元件更大的长度,所述外部的探测器元件分别具有长度l2。外部的探测器元件的长度l2根据jp 10
‑
185507 a分别以选择。沿着测量方向间隔开地设置有相同构造的第二探测器基本单体,所述第二探测器基本单体与第一探测器基本单体一起形成第一探测器块。借助于第一探测器块在此产生周期性的第一增量信号;经由第二探测器块产生周期性的第二增量信号,该第二增量信号相对于第一增量信号相位偏移90
°
。第二探测器块垂直于测量方向相对于第一探测器块偏移大于长度l1的量地布置。
5.该滤波变型方案一方面仅为从测量信号过滤掉第三谐波而设计;但有时测量信号还包含要被消除的较高次的谐波。
6.另一方面,探测器块的垂直于条方向所需的偏移以用于产生第一和第二增量信号被证明为不利的。例如如果在标尺中的材料组分中存在不均匀性,则第一增量信号的振幅和第二增量信号的振幅局部不同,这导致不准确的位置检测。
技术实现要素:
7.本发明的目的在于给出一种高精度的磁性位置测量装置,该磁性位置测量装置实现从输出信号有效地过滤掉多个不期望的谐波。在此,经由探测器组件的尽可能紧凑的延展即使在被采样的标尺中存在不均匀性的情况下也应确保良好的滤波效果。
8.该目的根据本发明通过带有权利要求1的特征的磁性位置测量装置来实现。
9.根据本发明的磁性位置测量装置的有利的实施形式由在从属权利要求中举出的措施得出。
10.根据本发明的磁性位置测量装置包括磁性标尺以及沿至少一个测量方向相对于所述磁性标尺可运动的采样单元。磁性标尺具有以均匀的栅尺度p布置的标尺区域,所述标尺区域带有相反定向的磁化部,其中,栅尺度p规定标尺区域沿着测量方向的延展。采样单元具有至少一个第一探测器基本单体,所述第一探测器基本单体包括三个条形的、磁阻的探测器元件,所述探测器元件沿测量方向相对彼此间隔开地布置,其中,探测器元件的纵向方向分别垂直于测量方向定向。第一探测器基本单体中的沿着测量方向相邻的探测器元件具有间距d
x
=p/12。
11.优选地,中间的探测器元件沿着其纵向方向具有长度l
b
,该长度大于两个外部的探测器元件的长度l
a
、l
c
。
12.在一种可行的实施形式中,所述两个外部的探测器元件在此分别具有探测器元件长度。
13.此外,可以设置成,采样单元具有至少一个第一探测器块,所述第一探测器块包括第一探测器基本单体第二探测器基本单体,第二探测器基本单体与所述第一探测器基本单体相同地构造,其中,第二探测器基本单体
‑
沿着测量方向相对于第一探测器基本单体偏移测量方向偏移量v_de
x
=p/6地布置,并且
‑
垂直于所述测量方向相对于第一探测器基本单体偏移横向偏移量v_de
y
=l
b
δ1地布置,从而第一探测器块沿着探测器元件的纵向方向具有探测器块长度l_db
y
=2
•
l
b
δ1,并且其中,选择δ1=[10μm至100μm]。
[0014]
此外可行的是,采样单元还具有第二探测器块,该第二探测器块与所述第一探测器块相同地构造,其中,第一探测器块和第二探测器块一起形成第一探测器组,并且其中,第二探测器块
‑
沿着测量方向相对于第一探测器块偏移测量方向偏移量v_db
x
=p/22地布置,并且
‑
垂直于所述测量方向相对于第一探测器块偏移横向偏移量v_db
y
=l_db
y
δ2地布置,并且其中选择δ2=[10μm至100μm]。
[0015]
此外,第一探测器组的探测器元件可以相互串联,从而在标尺和采样单元相对运动的情况下经由第一探测器组能够产生周期性的第一子增量信号。
[0016]
此外可以设置成,采样单元具有至少三个另外的探测器组,所述另外的探测器组分别与所述第一探测器组相同地构造,其中,
‑
第二探测器组沿着测量方向以间距g
x
=p/4与第一探测器组间隔开地布置,从而在标尺和采样单元相对运动的情况下经由第二探测器组能够产生周期性的第二子增量信
号,所述第二子增量信号相对于第一子增量信号相位偏移90
°
,并且
‑
第三探测器组沿着测量方向以间距g
x
=p/4与第二探测器组间隔开地布置,从而在标尺和采样单元相对运动的情况下经由第三探测器组能够产生周期性的第三子增量信号,所述第三子增量信号相对于第二子增量信号相位偏移90
°
,并且
‑
第四探测器组沿着测量方向以间距g
x
=p/4与第三探测器组间隔开地布置,从而在标尺和采样单元相对运动的情况下经由第四探测器组能够产生周期性的第四子增量信号,所述第四子增量信号相对于第三子增量信号相位偏移90
°
。
[0017]
在此可行的是,
‑
第一和第三探测器组如此相互联接,使得由第一和第三子增量信号能够产生周期性的第一增量信号,并且
‑
第二和第四探测器组如此相互联接,使得由第二和第四子增量信号能够产生周期性的第二增量信号,该第二增量信号相对于第一增量信号相位偏移90
°
。
[0018]
在一种备选实施形式中还可以设置成,采样单元具有至少一个第一探测器块,第一探测器块包括第一探测器基本单体和第二探测器基本单体,其中,第二探测器基本单体垂直于所述测量方向相对于第一探测器基本单体偏移测量方向偏移量v_de
x
=p/6地布置,并且其中,探测器元件不仅是第一探测器基本单体的组成部分而且是第二探测器基本单体的组成部分,从而第一探测器块包括五个探测器元件。
[0019]
在此可行的是,
‑
所述两个探测器基本单体的中间的探测器元件分别具有相同的长度l
b
=l
b
',并且
‑
所述两个探测器基本单体的最外面的探测器元件分别具有相同的长度l
a
=l
a
',并且
‑
不仅是第一探测器基本单体的组成部分而且是第二探测器基本单体的组成部分的探测器元件沿着其纵向方向具有探测器元件长度。
[0020]
优选地,在此第一探测器块沿着探测器元件的纵向方向具有探测器块长度l_db
y
'=2
•
l
b
δ1',其中,选择δ1'=[10μm至100μm]。
[0021]
此外在此设置成,
‑
不仅是第一探测器基本单体的组成部分而且是第二探测器基本单体的组成部分的探测器元件相对于第一探测器块的居中的对称线对称地布置,并且
‑
第一探测器基本单体的两个另外的探测器元件在δ1'/2和l_db
y
'/2之间的范围内间隔开地布置在对称线的一侧上,并且
‑
第二探测器基本单体的两个另外的探测器元件在δ1'/2和l_db
y
'/2之间的范围内布置在对称线的相对而置的侧面上。
[0022]
此外,采样单元还可以具有第二探测器块,所述第二探测器块与所述第一探测器块相同地构造,其中,第一探测器块和第二探测器块一起形成第一探测器组,并且其中,第二探测器块
‑
沿着测量方向相对于第一探测器块偏移测量方向偏移量v_db
x
'=p/22地布置,并且
‑
垂直于测量方向相对于第一探测器块偏移横向偏移量v_db
y
=l_db
y
' δ2'地布置,并且其中,选择δ2'=[10μm至100μm]。
[0023]
有利地,探测器组的探测器元件分别相互串联。
[0024]
此外可以设置成,探测器元件构造为各向异性的磁阻的传感器。
[0025]
在根据本发明的磁性位置测量装置中,可以基于第一探测器基本单体的构造而构建如下装置,该装置也确保对输出信号中的多个不期望的谐波的滤波或抑制、例如确保对3次、5次、7次、9次和11次谐波的同时滤波。这此外可以通过采样侧的探测器组件中的为此所需要的结构的极其紧凑的空间延展来实现。由此能够显著减小可能的标尺不均匀性对期望的滤波效果的影响。
[0026]
本发明的其他细节和优点借助下面结合附图对根据本发明的装置的实施例的描述来阐释。
附图说明
[0027]
其中:图1示出根据本发明的适合于检测旋转的相对运动的磁性位置测量装置的第一实施例的示意图;图2示出根据本发明的适合于检测线性的相对运动的磁性位置测量装置的第二实施例的示意图;图3示出用于阐释根据本发明的磁性位置测量装置的采样单元的实施例中的探测器基本单体的构造的示意图;图4示出用于阐释根据本发明的磁性位置测量装置的采样单元的实施例中的探测器块的构造的示意图;图5示出用于阐释根据本发明的磁性位置测量装置的采样单元的实施例中的探测器组的构造的示意图;图6示出用于阐释带有根据本发明的磁性位置测量装置的采样单元的实施例中的多个探测器组的布置结构的示意图;图7示出用于阐释根据本发明的磁性位置测量装置的采样单元的另外的实施例中的探测器块的构造的示意图;图8示出用于阐释图7的实施例中的探测器组的构造的示意图。
具体实施方式
[0028]
图1和2以强烈示意性的形式图解说明根据本发明的磁性位置测量装置的第一和第二实施例。
[0029]
图1中所示的变型方案在此用于检测两个
‑
未示出的
‑
对象的相对位置,所述对象围绕旋转轴线r相对彼此可旋转运动地布置。在此,第一对象与根据本发明的磁性位置测量装置的磁性标尺10连接,第二对象与位置测量装置的采样单元20连接。标尺10和采样单元20可沿着测量方向x相对于彼此围绕旋转轴线r运动,其中,测量方向x在此沿着围绕旋转轴线r的圆环延伸。
[0030]
与标尺10和采样单元20连接的对象可以例如是相对彼此围绕旋转轴线r可运动的两个机器部件,所述机器部件的相对位置可借助于根据本发明的磁性位置测量装置检测。为此,位置测量装置产生与位置有关的呈周期性增量信号形式的采样信号,其能够由
‑
未示
出的
‑
后续电子设备进一步处理。
[0031]
磁性标尺10具有标尺区域11a,11b,所述标尺区域带有相反定向的磁化部,所述标尺区域以均匀的栅尺度p沿着测量方向x布置在转鼓状的承载体的外部的周缘面上。转鼓状的承载体在此可转动地围绕旋转轴线r布置。栅尺度p规定标尺区域11a,11b沿着测量方向x的延展;由此不仅标尺区域11a而且标尺区域11b都具有沿着测量方向x的相同的延展。如由图1可见,标尺区域11a,11b如此布置,使得相邻的标尺区域11a,11b在边界区域中分别具有相反定向的磁化部或相同的磁极。因此,在相邻的标尺区域11a,11b中,磁性的北极或南极总是相对而置。标尺周期性λ在如此构造的标尺10中因此根据λ=2
•
p得到。
[0032]
由此,经由标尺10沿着测量方向x相邻于标尺10产生周期性调制的磁场,该磁场被采样单元20采样。在一种可行的实施例中,标尺区域11a,11b的栅尺度根据p=395μm选择。
[0033]
在采样单元20的侧面上设置有探测器组件,该探测器组件带有多个磁阻的探测器元件,以用于产生与位置有关的采样信号或增量信号。探测器组件在图1中仅示意性示出并且在进一步描述的过程中还更详细阐释。在当前实施例中,采样单元20相对于旋转的、转鼓状的带有标尺10的承载体固定地布置。
[0034]
在该实施例中各向异性的磁阻的传感器在采样单元20中充当磁阻的探测器元件,所述各向异性的磁阻的传感器也作为所谓的amr
‑
传感器已知。所述各向异性的磁阻的传感器由条形构造的薄层构成,所述薄层由nife
‑
合金、例如坡莫合金制成,所述nife
‑
合金的电阻在存在外部的磁场的情况下改变。基于周期性调制的标尺磁场,在标尺10和采样单元20相对运动的情况下由此可以经由采样单元20的探测器组件产生与位置有关的、周期性的采样信号,其具有信号周期sp=p。
[0035]
借助于根据本发明的磁性位置测量装置产生的采样信号被传输到同样未在附图中示出的后续电子设备处,该后续电子设备视应用而定进一步处理所述采样信号。例如,所述后续电子设备可以是上级的机器控制设备,该上级的机器控制设备控制两个相对彼此可运动的机器部件的相对运动。
[0036]
根据本发明的磁性位置测量装置的第二变型方案在图2中示出。其用于检测两个
‑
同样未示出的
‑
对象的相对位置,所述对象在此沿着线性测量方向x相对彼此可移动地布置。第一对象又与根据本发明的磁性位置测量装置的磁性标尺110连接,第二对象与位置测量装置的采样单元120连接。
[0037]
标尺110在此沿着线性测量方向x延伸并且同样具有带有相反定向的磁化部的标尺区域111a,111b。标尺区域111a,111b如旋转的变型方案中那样以均匀的栅尺度p沿着测量方向x布置在适合的承载体上。
[0038]
在该示例中,采样单元120和尤其带有磁阻的探测器元件的探测器组件的具体构造也不能从图中看出。随后借助图3至6详细阐释根据本发明的磁性位置测量装置的采样单元120的可行的变型方案;其不仅可以使用在根据本发明的装置的旋转的实施形式中而且可以使用在根据本发明的装置的线性的实施形式中。
[0039]
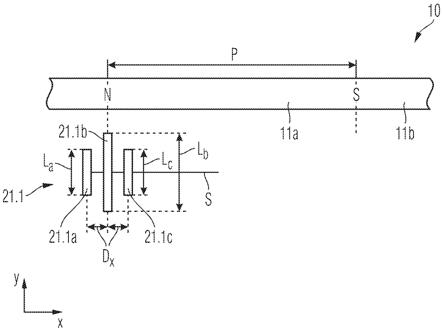
图3以示意性形式示出采样单元的探测器组件中的第一探测器基本单体21.1的俯视图,该采样单元相邻于在该采样单元上方采样的磁性标尺10的区段示出。根据该实施例,探测器基本单体21.1包括三个条形的、磁阻的探测器元件21.1a,21.1b,21.1c,所述探测器元件沿测量方向x相对彼此间隔开地布置。探测器元件21.1a至21.1c矩形地构造,其中,所
述探测器元件的平行定向的纵向方向y分别垂直于测量方向x延伸。
[0040]
在相邻的探测器元件21.1a
‑
21.1c之间的沿着测量方向x设置的间距d
x
在根据本发明的磁性位置测量装置中根据标尺10上的标尺区域11a,11b的栅尺度p选择并且为d
x
=p/12。
[0041]
如由图3可见,中间的探测器元件21.1b沿着其纵向方向y具有长度l
b
,该长度选择成大于两个外部的探测器元件21.1a,21.1c的长度l
a
、l
c
。这两个外部的探测器元件21.1a,21.1c的长度l
a
、l
c
选择成相同的并且分别具有长度。
[0042]
在一种可行的实施例中,在栅尺度p=395μm的情况下,中间的探测器元件21.1b的l
b
的长度根据l
b
=80μm选择,由此对于这两个外部的探测器元件21.1a,21.1c的长度l
a
、l
c
根据上文提到的关系l
a
=l
c
=46,19μm得出。
[0043]
经由第一探测器基本单体21.1的这种构造产生对包含在周期性采样信号中的谐波的定义的滤波效果。由此,利用如此构造的探测器基本单体21.1能够将5次谐波和7次谐波从如下采样信号中过滤出来,所述采样信号在标尺10和采样单元之间相对运动的情况下在磁性标尺10采样时产生。
[0044]
原则上,在第一探测器基本单体21.1的该示例中,不一定需要使两个外部的探测器元件21.1a,21.1c如图3的示例中所设置的那样关于中间的探测器元件21.1b的对称线s居中地布置。备选地也可行的是,所述探测器元件21.1a,21.1c沿着其纵向方向y在如下区域中移动地布置,该区域通过中间的探测器元件21.1b的长度l
b
预设。
[0045]
为了除了5次谐波和7次谐波以外还将其他谐波从采样信号中去除,可以对采样单元中的由第一探测器基本单体21.1构成的探测器组件适当地进行修改或扩展。下面借助图4中的示意图阐释一种用于对3次谐波和9次谐波的附加的滤波的可行方案。
[0046]
在该实施例中设置成,采样单元中的探测器组件除了第一探测器基本单体21.1以外还具有第二探测器基本单体21.2。第二探测器基本单体21.2原则上与第一探测器
‑
5基本单体21.1相同地构造,即类似于第一探测器基本单体21.1同样包括三个探测器元件21.2a
‑
21.2c,所述三个探测器元件的沿着方向y的长度及其沿着测量方向彼此间的相对布置类似于第一探测器基本单体21.1地选择。
[0047]
第二探测器基本单体21.2以相对于第一探测器基本单体21.1的特定的相对位置布置在探测器组件中。由此,第二探测器基本单体21.2沿着测量方向x相对于第一探测器基本单体21.1偏移测量方向偏移量v_de
x
=p/6地布置。此外设置成,第二探测器基本单体21.2垂直于测量方向x(即沿着y方向)相对于第一探测器基本单体21.1偏移横向偏移量v_de
y
=l
b
δ1地布置。在此,参量δ1优选在δ1=[10μm至100μm]的范围内选择。
[0048]
由此,经由这两个探测器基本单体21.1,21.2构造第一探测器块22.1。第一探测器块22.1在此沿着探测器元件21.1a
‑
21.1c,21.2a
‑
21.2c的纵向方向y具有探测器块长度l_db
y
=2
•
l
b
δ1。
[0049]
如果参量δ1在一种实施例中选择例如δ1=80μm,则在l
b
=80μm的情况下产生沿着y方向的探测器块长度l_db
y
=240μm。由此,借助于探测器组件因而可以实现将不期望的谐波从所产生的采样信号中过滤掉,该探测器组件沿着y方向非常紧凑地构造。如果可能的标尺不均匀性的典型的延展以约300μm的数量级存在,则由此可以借助于如此构造的探测器组件显著减小可能的标尺不均匀性对期望的滤波效果的影响。
[0050]
如果除了对3次、5次、7次和9次谐波进行滤波以外还要将11次谐波从采样信号中过滤出来,则由第一探测器块22.1构成的探测器组件可以根据图4在采样单元中再次扩展。下面借助图5中的示意图阐释用于对11次谐波的附加的滤波的可行方案。
[0051]
在该实施例中设置成,采样单元中的探测器组件除了第一探测器块22.1以外还具有第二探测器块22.2。第二探测器块22.2原则上与第一探测器块22.1相同地构造并且同样由两个探测器基本单体构成,所述两个探测器基本单体具有相对彼此特定的相对布置。
[0052]
第二探测器块22.2在探测器组件中以相对于第一探测器块22.1的特定的相对布置来安放。由此,一方面设置成,第二探测器块沿着测量方向x相对于第一探测器块22.1偏移测量方向偏移量v_db
x
=p/22地布置。另一方面,第二探测器块22.2垂直于测量方向x相对于第一探测器块22.1偏移横向偏移量v_db
y
=l_db
y
δ2地布置。参量δ2在此优选在δ2=[10μm至100μm]的范围内选择。
[0053]
在该实施例中,经由两个探测器块22.1,22.2构造第一探测器组23.1,第一探测器组适合用于将3次、5次、7次、9次和11次谐波从采样信号中过滤掉。
[0054]
第一探测器组23.1的全部的探测器元件在采样单元中相互串联。由此在标尺10和采样单元相对运动的情况下可以产生周期性的第一子增量信号,该第一子增量信号在下面用s_0表示。
[0055]
为了可以给处于根据本发明的磁性位置测量装置下游的后续电子设备提供相位偏移90
°
的增量信号,图5中的探测器组件可以再次扩展。这种探测器组件的相应的变型方案在图6中示意性示出。此外,在该图中示出连接线路,所述连接线路在探测器组10内分别将探测器元件相互串联;所述连接线路可以例如构造为在探测器元件的坡莫合金
‑
层条之间的铜线路。
[0056]
图6中所示出的探测器组件除了根据图5中的示例的第一探测器组23.1以外还包括三个另外的探测器组23.2
‑
23.4,所述另外的探测器组分别原则上与第一探测器组23.1相同地构造。
[0057]
在此,第二探测器组23.2沿着测量方向x以间距g
x
=p/4与第一探测器组23.1间隔开地布置。由此,在标尺10和采样单元相对运动的情况下,经由第二探测器组23.2能够产生周期性的第二子增量信号s_90,该第二子增量信号相对于第一子增量信号s_0相位偏移90
°
。
[0058]
第三探测器组23.3此外沿着测量方向x以间距g
x
=p/4与第二探测器组23.2间隔开地布置,对此在标尺10和采样单元相对运动的情况下能够产生周期性的第三子增量信号s_180,该第三子增量信号相对于第二子增量信号s_90相位偏移90
°
。
[0059]
最后,第四探测器组23.4沿着测量方向x以间距g
x
=p/4与第三探测器组23.3间隔开地布置,以便对此在标尺10和采样单元相对运动的情况下经由第四探测器组23.4产生周期性的第四子增量信号s_270,该第四子增量信号相对于第三子增量信号s_180相位偏移90
°
。
[0060]
为了由四个如此产生的子增量信号s_0,s_90,s_180,s_270产生在后续电子设备方面所需要的带有相位偏移90
°
的两个周期性的增量信号,此外可以设置成,一方面第一和第三探测器组23.1,23.3经由半桥如此相互联接,使得由第一和第三子增量信号s_0,s_180能够产生周期性的第一增量信号sin。另一方面,在这种情况下第二和第四探测器组23.2,
23.4经由另外的半桥如此相互联接,使得由第二和第四子增量信号s_90,s_270)能够产生周期性的第二增量信号cos,该第二增量信号相对于第一增量信号sin相位偏移90
°
。探测器元件的相应的联接在图6中在此并未详细地示出,而是仅示意性示出。
[0061]
对此备选地,增量信号sin,cos的产生也能够由全桥实现,所述全桥分别由两个相对彼此并联的半桥构成。为了形成全桥设置有四个另外的探测器组(23.1',23.2',23.3'和23.4'),所述四个另外的探测器组与根据所阐释的示例的第一至第四探测器组相同地构造并且沿着测量方向x相对于前四个探测器组偏移栅尺度p地布置。第一增量信号sin那么由组23.1,23.3,23.1'和23.3'的全桥
‑
联接产生。相位偏移90
°
的第二增量信号cos由组23.2,23.4,23.2'和23.4'的全桥
‑
联接产生。
[0062]
此外,这种探测器组件可以扩展成由多个探测器组构成的矩阵,所述矩阵由沿测量方向x布置的多个探测器组的行以及沿y方向布置的带有多个探测器组的列构成。例如,为此可以构造比如由八行和四列的探测器组构成的矩阵。经由这样的探测器组件能够实现所产生的采样信号的再次改善的取平均,此外,由此产生的由根据本发明的位置测量装置的不完美的附装引起的误差可以在相应的应用中最小化。
[0063]
用于备选地构造根据本发明的位置测量装置的采样单元的探测器组件中的适合的探测器块或探测器组的另外的实施例下面借助图7和8阐释;在此,以书面形式探讨与直到现在所阐释的变型方案的决定性区别。
[0064]
在图7中示出用于构造包括两个探测器基本单体221.1,221.2的第一探测器块222.1的一种可行方案,其中,第二探测器基本单体221.2沿着测量方向x相对于第一探测器基本单体221.1偏移测量方向偏移量v_de
x
=p/6地布置。此外,在此设置成,探测器元件221.3不仅是第一探测器基本单体221.1的组成部分而且是第二探测器基本单体221.2的组成部分。如由附图可见,所述探测器元件在第一探测器基本单体222.1中是从左侧起第三个探测器元件或在第二探测器基本单体中是从左侧起第一个探测器元件。除此以外,第一和第二探测器基本单体221.1,221.2分别还包括两个另外的探测器元件221.1a,221.1b或221.2a,221.2b。由此,图7中所示出的第一探测器块222.1具有总共五个探测器元件221.1a,221.1b,221.3,221.2a,221.2b。
[0065]
基本单体221.1,221.2的相邻的探测器元件如在上述示例中那样沿着测量方向x分别具有间距d
x
=p/12。
[0066]
在这两个探测器基本单体221.1,221.2中,中间的探测器元件221.1b,221.2b分别具有相同的长度l
b
=l
b
';同样地,这两个探测器基本单体221.1,221.2中的最外面的探测器元件221.1a,221.2a分别具有相同的长度l
a
=l
a
'。
[0067]
不仅是第一探测器基本单体221.1的组成部分而且是第二探测器基本单体221.2的组成部分的这个探测器元件221.3在所示的实施例中具有长度对于图7中所示出的第一探测器块221.1,由此沿着探测器元件221.1a,221.1b,221.3,221.2a,221.2b的纵向方向y得到探测器块长度l_db
y
'=2
•
l
b
δ1';在此,选择δ1'=[10μm至100μm]。
[0068]
如此外由图7可看出,不仅是第一探测器基本单体221.1的组成部分而且是第二探测器基本单体221.2的组成部分的探测器元件221.3相对于第一探测器块221.1的居中的对称线s对称地布置。第一探测器基本单体221.1的两个另外的探测器元件221.1a,221.1b此
外在δ1'/2和l_db
y
'/2之间的范围内间隔开地布置在对称线s的一侧上。第二探测器基本单体221.2的两个另外的探测器元件221.2a,221.2b在δ1'/2和l_db
y
'/2之间的范围内布置在对称线s的相对而置的侧面上。
[0069]
借助于如此构造的第一探测器块221.1能够从周期性的采样信号中将3次、5次、7次和9次谐波过滤出来。如果此外也还要将11次谐波过滤掉,则探测器组件可以类似于上述示例以另外的、第二探测器块222.2补充,如这在图8中示意性示出的。第二探测器块222.2与第一探测器块222.1原则上相同地构造;该第二探测器块与第一探测器块222.1又一起形成第一探测器组223.1,该第一探测器组适合于产生第一子增量信号。
[0070]
第二探测器块222.2沿着测量方向x相对于第一探测器块222.1偏移测量方向偏移量v_db
x
'=p/22地布置。垂直于测量方向x,第二探测器块222.2相对于第一探测器块22.1偏移横向偏移量v_db
y
=l_db
y
' δ2'地布置;在此,选择δ2'=[10μm至100μm]。
[0071]
如在上述示例中,图8的探测器组件自然还能够以三个另外的探测器组补充,经由所述三个另外的探测器组能够产生三个另外的子增量信号。由总共四个探测器组的适合的联接于是又能够形成两个相位偏移90
°
的增量信号sin,cos。
[0072]
除了具体描述的实施例以外,在本发明的范围内当然还存在针对根据本发明的磁性位置测量装置的另外的设计可行方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
