1.本发明涉及控制自动驾驶车辆的系统及方法。
背景技术:
2.日本特开2019
‑
168370号公报公开了一种控制自动驾驶车辆的系统。该现有系统在到达自动驾驶车辆的目的地点附近的情况下,进行是否能够在该目的地点处停止的检测。在被检测为不能在目的地点处停止的情况下,将自动驾驶车辆的停止位置变更为目的地点之外的地方。
3.专利文献1:日本特开2019
‑
168370号公报
技术实现要素:
4.考虑目的地点为酒店、大楼、车站、机场等设施的情况。这种设施通常设置有车辆停靠位。在设施设置有车辆停靠位的情况下,考虑自动驾驶车辆能够利用车辆停靠位内的乘降(pick up and/or drop off)用区域停车。在以下的说明中,也将“乘降”称为“pudo”。
5.pudo用区域的面积有限。因此,预想当自动驾驶车辆到达车辆停靠位的入口时,判断到pudo用区域停满了其他车辆、没有空闲空间的情况。在该情况下,如果在与pudo用区域不同的区域中进行pudo动作,可能会妨碍其他车辆、行人的通行。
6.本发明的一个目的在于提供这样一种技术:能够当pudo用区域没有空闲空间时,不妨碍其他车辆、行人通行而自动驾驶车辆进行pudo动作。
7.第一发明是一种自动驾驶系统,其控制提供无人驾驶接送服务的自动驾驶车辆,具有如下特征。所述自动驾驶系统具备信息获取装置和控制装置。所述信息获取装置获取用户信息和驾驶环境信息。所述用户信息表示与所述无人驾驶接送服务的用户有关的信息。所述驾驶环境信息表示与所述自动驾驶车辆的驾驶环境有关的信息。所述控制装置基于所述用户信息和所述驾驶环境信息,进行所述自动驾驶车辆的行驶控制处理。所述行驶控制处理包含车辆停靠位控制处理。所述车辆停靠位控制处理在所述用户的乘降地点为包含行驶用区域和乘降用区域在内的设施车辆停靠位的情况下进行。在所述车辆停靠位控制处理中,所述控制装置判定所述乘降用区域是否存在空闲空间,所述控制装置在判定为不存在所述空闲空间的情况下,基于所述用户信息,判定是否预期为所述用户在所述车辆停靠位处快速乘降,所述控制装置在判定为预期所述快速乘降的情况下,将所述自动驾驶车辆进行乘降动作的目标乘降位置设定于所述行驶用区域内的任意位置。
8.第二发明在第一发明中还具有以下特征。
在所述车辆停靠位控制处理中,所述控制装置在判定为并非预期所述快速乘降的情况下,将所述自动驾驶车辆的等待所述乘降动作的目标等待位置设定于所述行驶用区域内的位置、且与在所述乘降用区域中的最末尾的位置处停止的停止车辆的横向位置相比位于上游的位置。
9.第三发明在第二发明中还具有以下特征。在所述车辆停靠位控制处理中,进而,所述控制装置基于所述驾驶环境信息,判定停在所述乘降用区域的停止车辆的乘降动作是否预期结束,所述控制装置在判定为所述停止车辆的所述乘降动作预期结束的情况下,将所述目标等待位置变更为该预期结束的所述停止车辆的横向位置的附近、且与该横向位置相比位于上游的位置。
10.第四发明在第一发明中还具有以下特征。在所述车辆停靠位控制处理中,所述控制装置在判定为并非预期所述快速乘降的情况下,基于所述驾驶环境信息,判定停在所述乘降用区域的停止车辆的乘降动作是否预期结束,所述控制装置在判定为所述乘降动作预期结束的情况下,将所述目标等待位置变更为该预期结束的所述停止车辆的横向位置的附近、且与该横向位置相比位于上游的位置。
11.第五发明在第二至第四发明中的任一个中还具有以下特征。在所述车辆停靠位控制处理中,进而,所述控制装置在设定所述目标等待位置之后,基于所述驾驶环境信息,判定是否识别出所述自动驾驶车辆的后续车辆向所述行驶用区域进入的进入动作,所述控制装置在判定为识别出所述进入动作的情况下,设定暂时通过所述车辆停靠位后返回该车辆停靠位的行驶路径。
12.第六发明在第二至第四发明中的任一个中还具有以下特征。在所述车辆停靠位控制处理中,进而,所述控制装置在设定所述目标等待位置之后,基于所述驾驶环境信息,判定是否识别出所述自动驾驶车辆的后续车辆向所述行驶用区域进入的进入动作,所述控制装置在判定为识别出所述进入动作的情况下,判定所述自动驾驶车辆是否预期在所述目标等待位置处短时等待,所述控制装置在判定为预期所述短时等待的情况下,保持所述目标等待位置。
13.第七发明在第六发明中还具有以下特征。在所述车辆停靠位控制处理中,所述控制装置在判定为并非预期所述短时等待的情况下,设定暂时通过所述车辆停靠位后返回该车辆停靠位的行驶路径。
14.第八发明在第一至第七发明中的任一个中还具有以下特征。所述目标乘降位置是最靠近所述乘降用区域相关的所述设施的出入口的位置。
15.第九发明在第一至第七发明中的任一个中还具有以下特征。所述目标乘降位置是在所述乘降用区域停止的相邻的停止车辆的横向位置的中间位置。
16.第十发明是一种自动驾驶方法,其控制提供无人驾驶接送服务的自动驾驶车辆,具有如下特征。所述自动驾驶系统包括以下步骤:获取表示与所述无人驾驶接送服务的用户有关的信息的用户信息、和表示与所述自动驾驶车辆的驾驶环境有关的信息的驾驶环境信息的步骤;以及基于所述用户信息及所述驾驶环境信息,进行所述自动驾驶车辆的行驶控制处理的步骤。所述行驶控制处理包含车辆停靠位控制处理,所述车辆停靠位控制处理在所述用户的乘降地点为包含行驶用区域和乘降用区域在内的设施车辆停靠位的情况下进行。所述车辆停靠位控制处理包括以下步骤:判定所述乘降用区域是否存在空闲空间的步骤;在判定为不存在所述空闲空间的情况下,基于所述用户信息判定是否预期为所述用户在所述车辆停靠位处快速乘降的步骤;以及在判定为预期所述快速乘降的情况下,将所述自动驾驶车辆进行乘降动作的目标乘降位置设定于所述行驶用区域内的任意位置的步骤。
17.第十一发明在第十发明中还具有以下特征。所述车辆停靠位控制处理还包括:在判定为并非预期所述快速乘降的情况下,将所述自动驾驶车辆的等待所述乘降动作的目标等待位置设定于所述行驶用区域内的位置、且与在所述乘降用区域中的最末尾的位置处停止的停止车辆的横向位置相比位于上游的位置的步骤。
18.第十二发明在第十一发明中还具有以下特征。所述车辆停靠位控制处理还包括以下步骤:基于所述驾驶环境信息,判定停在所述乘降用区域的停止车辆的乘降动作是否预期结束的步骤;以及在判定为所述停止车辆的所述乘降动作预期结束的情况下,将所述目标等待位置变更为该预期结束的所述停止车辆的横向位置的附近、且与该横向位置相比位于上游的位置的步骤。
19.第十三发明在第十发明中还具有以下特征。所述车辆停靠位控制处理还包括以下步骤:在判定为并非预期所述快速乘降的情况下,基于所述驾驶环境信息,判定停在所述乘降用区域的停止车辆的乘降动作是否预期结束的步骤;以及在判定为所述乘降动作预期结束的情况下,将所述自动驾驶车辆的等待所述乘降动作的目标等待位置变更为该预期结束的所述停止车辆的横向位置的附近、且与该横向位置相比位于上游的位置的步骤。
20.第十四发明在第十一至第十三发明中的任一个中还具有以下特征。所述车辆停靠位控制处理还包括以下步骤:在设定所述目标等待位置之后,基于所述驾驶环境信息,判定是否识别出所述自动驾驶车辆的后续车辆向所述行驶用区域进入的进入动作的步骤;以及在判定为识别出所述进入动作的情况下,设定暂时通过所述车辆停靠位后返回该
车辆停靠位的行驶路径的步骤。
21.第十五发明在第十一至第十三发明中的任一个中还具有以下特征。所述车辆停靠位控制处理还包括以下步骤:在设定所述目标等待位置之后,基于所述驾驶环境信息,判定是否识别出所述自动驾驶车辆的后续车辆向所述行驶用区域进入的进入动作的步骤;以及在判定为识别出所述进入动作的情况下,判定所述自动驾驶车辆是否预期在所述目标等待位置处短时等待的步骤;以及在判定为预期所述短时等待的情况下,保持所述目标等待位置的步骤。
22.第十六发明在第十五发明中还具有以下特征。所述车辆停靠位控制处理还包括:在判定为并非预期所述短时等待的情况下,设定暂时通过所述车辆停靠位后返回该车辆停靠位的行驶路径的步骤。
23.第十七发明在第十至第十六发明中的任一个中还具有以下特征。所述目标乘降位置是最靠近所述乘降用区域相关的所述设施的出入口的位置。
24.第十八发明在第十至第十六发明中的任一个中还具有以下特征。所述目标乘降位置是在所述乘降用区域停止的相邻的停止车辆的横向位置的中间位置。发明的效果
25.根据第一或第十发明,即使在乘降用区域没有空闲空间的情况下,当预期为用户快速乘降时,将自动驾驶车辆进行pudo动作的目标乘降位置设定于行驶用区域内的任意位置。因此,能够避免妨碍车辆停靠位内的其他车辆、行人通行的状况的同时进行该pudo动作。
26.根据第二或第十一发明,当并非预期用户快速乘降时,将自动驾驶车辆的等待pudo动作的目标等待位置设定于行驶用区域内的位置、且与在乘降用区域中的最末尾的位置处停止的停止车辆的横向位置相比位于上游的位置。因此,自动驾驶车辆能够不困在车辆停靠位的入口处而等待至乘降用区域出现空闲空间。
27.根据第三或第十二发明,在停在乘降用区域的停止车辆的乘降动作预期结束的情况下,将目标等待位置变更为该预期结束的停止车辆的横向位置的附近、且与该横向位置相比位于上游的位置。因此,通过在pudo乘降动作预期结束的停止车辆启动之后立即开始自动驾驶车辆的动作,能够尽早结束该pudo动作。
28.根据第四或第十三发明,在停在乘降用区域的停止车辆的乘降动作预期结束的情况下,将目标等待位置设定为该预期结束的停止车辆的横向位置的附近、且与该横向位置相比位于上游的位置。因此,能够获得与第三或第十二发明的效果相同的效果。
29.根据第五或第十四发明,在设定目标等待位置之后,识别出后续车辆向行驶用区域进入的进入动作的情况下,设定暂时通过车辆停靠位后返回该车辆停靠位的行驶路径。因此,能够在避免妨碍已进入行驶用区域的后续车辆的通行的状况的同时,等待至乘降用区域出现空闲空间。
30.根据第六或第十五发明,即使在识别出后续车辆向行驶用区域进入的进入动作的情况下,在预期短时等待时保持目标等待位置。因此,能够在将妨碍已进入行驶用区域的后续车辆的通行的状况尽可能抑制的同时,等待至乘降用区域出现空闲空间。
31.根据第七或第十六发明,在识别出后续车辆向行驶用区域进入的进入动作且并非预期短时等待的情况下,设定暂时通过车辆停靠位后返回该车辆停靠位的行驶路径。因此,能够获得与第五或第十四发明的效果相同的效果。
32.根据第八或第十七发明,由于目标乘降位置被设定在最靠近乘降用区域相关的设施的出入口的位置,因此从该目标乘降位置到该出入口为止的距离变得最短。因此,能够将在行驶用区域中的pudo动作相伴的用户的移动负担尽可能抑制。
33.根据第九或第十八发明,由于将目标乘降位置设定于在乘降用区域停止的相邻的停止车辆的横向位置的中间位置,因此从该目标乘降位置到该乘降用区域为止的用户的移动距离变短。因此,能够确保与行驶用区域中的pudo动作相伴的用户的安全性。
附图说明
34.图1是说明无人驾驶接送服务的概要的图。图2是说明无人驾驶接送服务中的pudo动作的图。图3是说明第一实施方式的特征的图。图4是说明第一实施方式的特征的图。图5是说明第一实施方式的特征的图。图6是示出自动驾驶系统的构成例的框图。图7是示出驾驶环境信息的一个例子的框图。图8是示出用户信息的一个例子的框图。图9是示出第一实施方式涉及的车辆停靠位控制处理的流程的流程图。图10是说明第二实施方式的第一示例的特征的图。图11是说明第二实施方式的第二示例的特征的图。图12是说明第二实施方式的第三示例的特征的图。图13是示出第二实施方式的第一示例涉及的车辆停靠位控制处理的流程的流程图。图14是示出第二实施方式的第二示例涉及的车辆停靠位控制处理的流程的流程图。图15是说明第三实施方式的第一示例的特征的图。图16是示出第三实施方式的第一示例涉及的车辆停靠位控制处理的流程的流程图。图17是示出第三实施方式的第二示例涉及的车辆停靠位控制处理的流程的流程图。
具体实施方式
35.以下,参照附图对本发明的实施方式进行说明。
36.1.第一实施方式首先,参照图1~8说明本发明的第一实施方式。另外,第一实施方式涉及的自动驾驶方法是通过第一实施方式涉及的自动驾驶系统来实现的。
37.1-1.概要
1-1-1.无人驾驶接送服务图1是说明无人驾驶接送服务的概要的图。图1所示的自动驾驶车辆1不依赖于驾驶员的驾驶操作,而在从自动驾驶车辆1的出发地点到目的地点位置的行驶路径自主行驶。作为自动驾驶车辆1,例如示出无人出租车、无人公共汽车。
38.在本技术中,考虑自动驾驶车辆1的目的地点为具备车辆停靠位crp(carriage porch)的设施的情况。作为这种设施,例示了酒店、大楼、车站和机场。车辆停靠位crp具备与公共道路pbr相关的入口ent和出口ext。车辆停靠位crp单侧通行。也就是说,车辆(包括自动驾驶车辆1在内的全部车辆)在车辆停靠位crp中的行进方向是预先确定的。根据行进方向的角度定义了车辆停靠位crp中的“上游”和“下游”。
39.图2是说明无人驾驶接送服务中的pudo动作的图。车辆停靠位crp被大致分为车辆用区域zfv(zone for vehicle)和行人用区域zfp(zone for pedestrian)。区域zfp形成在比区域zfv高一个台阶的位置,从而明确区分两者的边界。区域zfv包括行驶用区域zfr(zone for run)和pudo用区域zfpd(zone for pudo)。图2以虚线示出了区域zfr与区域zfpd的边界的一个例子。但是,该边界无需在车辆停靠位crp的路面上描绘出。在该情况下,以区域zfp与区域zfv的边界的位置为基准来确定区域zfr与区域zfpd。
40.在无人驾驶接送服务中,与典型的接送服务一样,在靠近设施的出入口drw(doorway)的位置处进行pudo动作。至少在区域zfpd内的某一个位置进行pudo动作。与pudo动作有关的自动驾驶车辆1的控制根据“车辆停靠位控制处理”来进行。车辆停靠位控制处理是作为“行驶控制处理”的一个环节来执行的。行驶控制处理是为了使自动驾驶车辆1在从其出发地点到目的地点为止的行驶路径自主行驶而执行的处理。在自动驾驶车辆1的目的地点为具备车辆停靠位crp的设施的情况下,在从出发地点到入口ent为止的公共道路pbr上的行驶路径执行“行驶控制处理”。然后,在自动驾驶车辆1到达入口ent之后执行“车辆停靠位控制处理”。
41.在用户usr的乘载地点为具备车辆停靠位crp的设施的情况下,在区域zfpd内的某一个位置处进行乘载动作。然后,自动驾驶车辆1朝用户usr的放下地点出发。在用户usr的放下地点为具备车辆停靠位crp的设施的情况下,在区域zfpd内的某一个位置处进行放下动作。然后,自动驾驶车辆1朝其他目的地点(例如,其他的用户usr的乘载地点、无人驾驶接送服务的等待地点)出发。在自动驾驶车辆1的停止过程中,用户usr的放下动作和其他用户usr的乘载动作可以连续进行。
42.图1所示的自动驾驶系统100控制自动驾驶车辆1。典型地,自动驾驶系统100搭载于自动驾驶车辆1。自动驾驶系统100的功能的一部分配置在自动驾驶车辆1的外部,由此自动驾驶车辆1的控制可以远程进行。
43.自动驾驶系统100控制自动驾驶车辆1以使其从入口ent进入区域zfv。自动驾驶系统100还控制自动驾驶车辆1以使其在区域zfpd停止。如果自动驾驶车辆1停止,则自动驾驶系统100打开自动驾驶车辆1的车门。用户usr从自动驾驶车辆1下车或者坐上自动驾驶车辆1。之后,自动驾驶系统100关闭自动驾驶车辆1的车门。然后,自动驾驶系统100控制自动驾驶车辆1以使其从区域zfv出去并朝向出口ext行驶。
44.1-1-2.第一实施方式的特征图3~5是说明第一实施方式的特征的图。图2所说明的pudo动作是以在区域zfpd
存在空闲空间sfpd(space for pudo)为前提进行的。但是,由于车辆停靠位crp的面积有限,因此预想了区域zfpd停满停止车辆2的情况。还预想在设施的访客集中的时间段内区域zfpd停满了停止车辆2的情况。在这种情况下,难以像通常那样由自动驾驶车辆1进行pudo动作。
45.因此,在第一实施方式中,在车辆停靠位控制处理中,当自动驾驶车辆1到达入口ent时,判定区域zfpd是否停满了停止车辆2。然后,在判定为区域zfpd停满了停止车辆2的情况下,判定是否预期为快速pudo。“快速pudo”是指自动驾驶车辆1的pudo动作的所需时间在短时间内结束。所需时间是基于与用户usr有关的信息(以下,也称为“用户信息”)来计算的。
46.在车辆停靠位控制处理中,在判定为预期快速pudo的情况下,将用于自动驾驶车辆1进行pudo动作的目标位置tspd设定于区域zfr内的任意位置。在目标位置tspd被设定的情况下,自动驾驶车辆1在目标位置tspd停止,进行pudo动作。
47.图4是说明目标位置tspd的第一设定例的图。在图4所示的例子中,目标位置tspd被设定在最靠近出入口drw的位置。通过将目标位置tspd设定在这种位置,从自动驾驶车辆1进行pudo动作的位置到出入口drw为止的距离变得最短。因此,能够将伴随着快速pudo的用户usr的移动负担抑制到最小。
48.图5是说明目标位置tspd的第二设定例的图。在图5所示的例子中,目标位置tspd被设定在相邻的停止车辆2的横向位置的中间位置。通过将目标位置tspd设定在这种中间位置,用户usr在自动驾驶车辆1进行pudo动作的位置与区域zfpd之间的移动距离变短。因此,能够确保伴随着快速pudo的用户usr的安全性。
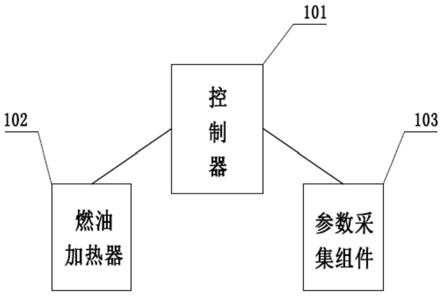
49.1-2.自动驾驶系统1-2-1.构成例图6是示出自动驾驶系统100的构成例的框图。如图6所示,自动驾驶系统100具备传感器组10、行驶装置20、通信装置30以及控制装置40。
50.传感器组10搭载于自动驾驶车辆1。传感器组10包括位置传感器11、车辆状态传感器12以及识别传感器13。位置传感器11检测自动驾驶车辆1的位置以及方位。作为位置传感器11,例示了gps(global positioning system)传感器。车辆状态传感器12检测自动驾驶车辆1的状态。作为车辆状态传感器12,例示了车速传感器、偏航率传感器、横向加速度传感器以及转向角传感器。识别传感器13识别(检测)自动驾驶车辆1的周围的状况。作为识别传感器13,例示了照相机、雷达和激光雷达(lidar:laser imaging detection and ranging)。
51.行驶装置20搭载于自动驾驶车辆1。行驶装置20包括转向装置、驱动装置以及制动装置。转向装置使自动驾驶车辆1的车轮转向。例如,转向装置包括电动助力转向(eps:electric power steering)装置。驱动装置是产生驱动力的动力源。作为驱动装置,例示了发动机、电动机和轮内电动机。制动装置产生制动力。
52.通信装置30与自动驾驶系统100的外部进行通信。例如,通信装置30与管理无人驾驶接送服务的管理服务器进行通信。作为其他例子,通信装置30与用户usr所有的终端(例如,智能电话、平板电脑、个人计算机)进行通信。
53.控制装置40控制自动驾驶车辆1。典型地,控制装置40是搭载于自动驾驶车辆1的
微型计算机。控制装置40也称为ecu(electronic control unit)。控制装置40可以是自动驾驶车辆1的外部的信息处理装置。在该情况下,控制装置40与自动驾驶车辆1进行通信,远程控制自动驾驶车辆1。
54.控制装置40具备处理器41和存储装置42。处理器41执行各种处理。存储装置42中储存有各种信息。作为存储装置42,例示了易失性存储器和非易失性存储器。处理器41执行作为计算机程序的控制程序,从而实现处理器41(控制装置40)执行的各种处理。控制程序存储在存储装置42中,或者记录在计算机可读存储介质中。
55.处理器41执行行驶控制处理。行驶控制处理包含转向控制处理、加速控制处理和减速控制处理。处理器41通过执行行驶控制处理来控制行驶装置20。具体地,处理器41通过执行转向控制处理来控制转向装置。此外,处理器41通过执行加速控制处理来控制驱动装置。此外,处理器41通过执行减速控制处理来控制制动装置。
56.此外,处理器41获取表示自动驾驶车辆1的驾驶环境的驾驶环境信息43。驾驶环境信息43是基于传感器组10的检测结果获取的。获取到的驾驶环境信息43被存储在存储装置42中。
57.图7是示出驾驶环境信息43的一个例子的框图。如图7所示,驾驶环境信息43包含车辆位置信息431、车辆状态信息432、周边状况信息433以及地图信息434。
58.车辆位置信息431是表示自动驾驶车辆1在绝对坐标系中的位置和方位的信息。处理器41从位置传感器11的检测结果获取车辆位置信息431。此外,处理器41也可以通过众所周知的定位(localization)来获取更高精度的车辆位置信息431。
59.车辆状态信息432是表示自动驾驶车辆1的状态的信息。作为自动驾驶车辆1的状态,例示了车速、偏航率、横向加速度和转向角。处理器41从车辆状态传感器12的检测结果获取车辆状态信息432。
60.周边状况信息433是表示自动驾驶车辆1的周围的状况的信息。周边状况信息433包含由识别传感器13得到的信息。例如,周边状况信息433包含由照相机拍摄到的表示自动驾驶车辆1的周围的状况的图像信息。作为另一个例子,周边状况信息433包含由雷达和激光雷达测量的测量信息。周边状况信息433还包含与自动驾驶车辆1的周边的物体有关的物体信息。作为自动驾驶车辆1的周边的物体,例示了其他车辆、行人、标识、白线、路边构造物(例如护栏、路缘石)等。物体信息表示物体相对于自动驾驶车辆1的相对位置。例如,通过分析由照相机得到的图像信息,能够辨别物体,并计算出该物体的相对位置。此外,也能够基于雷达测量信息,辨别物体,并获取该物体的相对位置。
61.地图信息434是表示车道配置和道路形状的信息。地图信息434包含通常的导航地图。处理器41从地图数据库获取需要的区域的地图信息434。地图数据库可以存储在搭载于自动驾驶车辆1的规定的存储装置中,也可以存储在自动驾驶车辆1的外部的管理服务器中。在后者的情况下,处理器41经由通信装置30与管理服务器进行通信,获取需要的地图信息434。
62.车辆停靠位信息435是表示车辆停靠位crp的构造、位置和范围的信息。例如,车辆停靠位信息435被预先登记在地图数据库中。作为其他例子,车辆停靠位信息435可以在自动驾驶车辆1接近设施时由设施提供。在该情况下,处理器41经由通信装置30与设施进行通信,获取与该设施有关的车辆停靠位信息435。另外,即使实际的车辆停靠位crp不明确,也
可以在地图数据中明确确定了车辆停靠位crp的构造、位置和范围。
63.返回图6,继续说明自动驾驶系统100的构成例。处理器41获取与希望利用无人驾驶接送服务的用户usr有关的用户信息44。用户信息44从管理服务器经由通信装置30提供。获取到的用户信息44被存储在存储装置42中。
64.图8是示出用户信息44的一个例子的框图。如图8所示,用户信息44包含id信息441、接送信息442和历史记录信息443。
65.id信息441是为了利用无人驾驶接送服务而被登记在管理服务器中的信息。id信息441中包含用户usr的个人数据和面部照片数据。个人数据中包含用户usr的id序号和适用优先座位条件的人(例如,老人、孕妇、带婴幼儿的人以及残疾人)的数据。id序号和面部照片的数据被用于管理服务器或自动驾驶车辆1的用户认证。优先座位条件的数据用于快速pudo的预期判定。预期判定将在后面进行描述。
66.接送信息442是在利用无人驾驶接送服务时由用户usr发送到管理服务器的信息。接送信息442中包含乘载地点和放下地点的数据。接送信息442中也包含乘载时刻的数据。乘载地点的数据也可以根据用户usr的终端的位置信息确定。此外,放下地点的数据可以在乘载动作之后由用户usr指定。接送信息442中也包含利用无人驾驶接送服务的人数的数据。接送信息442也包含与是否利用自动驾驶车辆1的行李舱有关的数据。接送信息442的一部分数据用于预期判定。
67.历史记录信息443是表示无人驾驶接送服务的利用历史记录的信息。历史记录信息443中包含将接送信息442发送到管理服务器的用户usr至今为止的接送信息。历史记录信息443中包含无人驾驶接送服务的总利用次数的数据。历史记录信息443的数据用于预期判定。
68.处理器41还执行车辆停靠位控制处理。车辆停靠位控制处理包含转向控制处理、加速控制处理和减速控制处理。以下,说明第一实施方式涉及的车辆停靠位控制处理。
69.1-2-2.车辆停靠位控制处理图9是示出第一实施方式涉及的车辆停靠位控制处理的流程的流程图。另外,图7中说明的驾驶环境信息43设为在其它处理流程中以每隔固定周期更新。
70.在图9所示的例程中,处理器41判定自动驾驶车辆1是否已抵达入口ent(步骤s11)。自动驾驶车辆1的位置是基于车辆位置信息431确定的。车辆停靠位crp的位置和范围是基于车辆停靠位信息435确定的。处理器41基于车辆位置信息431和车辆停靠位信息435,判定自动驾驶车辆1是否已到达入口ent。在步骤s11的判定结果为否定的情况下,处理器41结束本次处理。
71.在步骤s11的判定结果为肯定的情况下,处理器41判定在区域zfpd中是否存在空闲空间sfpd(步骤s12)。车辆停靠位crp的状况是基于周边状况信息433确定的。车辆停靠位crp的范围是基于车辆停靠位信息435确定的。处理器41基于周边状况信息433和车辆停靠位信息435,判定在区域zfpd是否存在空闲空间sfpd。
72.在步骤s12的判定结果为肯定的情况下,处理器41将目标位置tspd设定在区域zfpd内(步骤s13)。然后,处理器41控制自动驾驶车辆1,使得自动驾驶车辆1在从入口ent到目标位置tspd为止的行驶路径上行驶。此外,处理器41控制自动驾驶车辆1,以在目标位置tspd处自动驾驶车辆1进行pudo动作。之后,控制自动驾驶车辆1以使自动驾驶车辆1启动并
朝向出口ext行驶。
73.在步骤s12的判定结果为否定的情况下,处理器41进行是否预期快速pudo的判定(步骤s14)。也就是说,在步骤s14中,进行快速pudo的预期判定。在预期判定中,判定是否满足以下条件(i)~(v)。例如,在这些条件全部满足的情况下,处理器41判定为预期快速pudo。作为另一个例子,在满足条件(ii)~(v)中的至少一个以及条件(i)的情况下,处理器41判定为预期快速pudo。(i)用户usr不为适用优先座位条件的人(ii)用户usr不利用行李舱(iii)包含用户usr在内的服务利用人数少(例如2人以下)(iv)用户usr已习惯利用服务(v)用户usr无需用伞
74.是否满足条件(i)是基于id信息441来判定的。是否满足条件(ii)或(iii)是基于接送信息442来判定的。是否满足条件(iv)是基于历史记录信息443来判定的。例如,在无人驾驶接送服务的总利用次数为规定次数(例如3次)以上的情况下,判定为满足条件(iv)。条件(v)是基于车辆停靠位信息435来判定的。作为该情况下的车辆停靠位信息435,例示了车辆停靠位crp是否具备顶部的信息。
75.条件(iv)的判定也可以基于接送信息442和历史记录信息443的组合来进行。例如,在接送信息442中包含的乘载地点(或放下地点)也包含在历史记录信息443中的情况下,判定为满足条件(iv)。条件(v)也可以基于气象信息(例如,晴天或阴天)来判定。
76.在步骤s14的另一个例子中,处理器41基于用户信息44来预测pudo时间。例如,使用将根据条件(i)~(v)设定的各个pudo时间作为变量的模型公式来计算pudo时间。然后,在预测出的pudo时间少于容许时间的情况下,处理器41判定为预期快速pudo。容许时间被事先设定为,在假定区域zfr中的pudo动作妨碍了其他车辆、行人通行的情况下能够允许该pudo动作持续的时间(例如,数十秒~1分钟)。容许时间可以考虑车辆停靠位crp的面积、自动驾驶车辆1抵达入口ent的时间段等而变更。
77.在步骤s14的判定结果为肯定的情况下,处理器41将目标位置tspd设定在区域zfr内的任意位置(步骤s15)。设定好目标位置tspd之后的处理与步骤s13中的相同。
78.在步骤s14的判定结果为否定的情况下,处理器41将用于自动驾驶车辆1进行等待动作的目标位置tswt设定于入口ent(步骤s16)。在该情况下,自动驾驶车辆1在入口ent处等待至下一次起的例程的处理中步骤s12的判定结果为肯定。也就是说,自动驾驶车辆1在入口ent处等待至判定为区域zfpd存在空闲空间sfpd。
79.1-3.效果根据以上说明的第一实施方式,在车辆停靠位控制处理中,在区域zfpd不存在空闲空间sfpd的情况下进行预期判定。然后,在预期判定的结果为肯定的情况下,在区域zfr内的任意位置自动驾驶车辆1进行pudo动作。因此,即使在区域zfpd不存在空闲空间sfpd的情况下,也能够在避免妨碍车辆停靠位crp内的其他车辆、行人通行的状况的同时,自动驾驶车辆1进行pudo动作。
80.2.第二实施方式接下来,参照图10~14说明本发明的第二实施方式。另外,第二实施方式涉及的自
动驾驶方法是通过第二实施方式涉及的自动驾驶系统来实现的。此外,以下,适当省略了与第一实施方式的说明重复的说明。
81.2-1.概要在第一实施方式中,在预期判定的结果为否定的情况下,目标位置tswt被设定在入口ent处。与此相对,在第二实施方式中,在预期判定的结果为否定的情况下,目标位置tswt被设定在与入口ent不同的位置。以下,说明第二实施方式的几个示例。
82.2-1-1.第一示例图10是说明第二实施方式的第一示例的特征的图。如图10所示,在第一示例中,在区域zfpd不存在空闲空间sfpd。因此,预期判定的结果变为否定。在第一示例中,将目标位置tswt设定为位于区域zfr内且与停止车辆3的横向位置相比位于上游的位置。停止车辆3为停在区域zfpd的最末尾的位置的停止车辆2。
83.通过将目标位置tswt设定在这种位置,自动驾驶车辆1能够无需困在入口ent处而等待至区域zfpd出现空闲空间sfpd。此外,能够避免妨碍停止车辆2(包括停止车辆3)启动后的行驶。此外,与目标位置tswt被设定在入口ent处的情况相比,能够尽早结束自动驾驶车辆1的pudo动作。
84.2-1-2.第二示例图11是说明第二实施方式的第二示例的特征的图。与第一示例相同,在第二示例中,在区域zfpd也不存在空闲空间sfpd。因此,预期判定的结果变为否定。在第二示例中,在预期判定的结果为否定的情况下,进行是否检测到停止车辆4的判定。停止车辆4为pudo动作预期结束的停止车辆2。以下,为了便于说明,将是否检测到停止车辆4的判定也称为“结束预期判定”。然后,在结束预期判定的结果为肯定的情况下,将目标位置tswt设定于位于区域zfr内且与停止车辆4的横向位置相比位于上游的位置。
85.通过将目标位置tswt设定在这种位置,自动驾驶车辆1能够无需困在入口ent处而等待至区域zfpd出现空闲空间sfpd。此外,能够在停止车辆4启动后立即将自动驾驶车辆1的目标位置tspd设定在区域zfpd内。因此,与目标位置tswt被设定在入口ent处的情况相比,能够尽早结束自动驾驶车辆1的pudo动作。
86.2-1-3.第三示例图12是说明第二实施方式的第三示例的特征的图。在第三示例中,在第一示例所说明的目标位置tswt的设定后,进行第二示例所说明的结束预期判定。然后,在结束预期判定的结果为肯定的情况下,进行目标位置tswt的变更。这样,在第三示例中,存在目标位置tswt的设定进行两次的情况。但是,通过进行这种目标位置tswt的设定,能够享受第一示例和第二示例得到的效果。
87.2-2.自动驾驶系统2-2-1.车辆停靠位控制处理的第一示例图13是示出第二实施方式的第一示例涉及的车辆停靠位控制处理的流程的流程图。图13所示的例程的处理的流程基本上与图9说明的相同。因此,以下,说明在步骤s14的判定结果为否定的情况下进行的处理。
88.在步骤s14的判定结果为否定的情况下,处理器41将目标位置tswt设定于位于区域zfr内且与停止车辆3的横向位置相比位于上游的位置(步骤s21)。停止车辆3的横向位置
例如是以停止车辆3的后部或前部的检测位置作为基准来设定的。停止车辆3的检测位置的信息包含在周边状况信息433中。作为与停止车辆3的横向位置相比位于上游的位置,例示了靠入口ent侧离该横向位置规定距离(例如,1~3m)的位置。
89.2-2-2.车辆停靠位控制处理的第二示例图14是示出第二实施方式的第二示例涉及的车辆停靠位控制处理的流程的流程图。图14所示的例程是接着图13的步骤s14的处理进行的。另外,步骤s11~s13以及s15的处理如图13所说明地执行。
90.在步骤s14的判定结果为否定的情况下,处理器41判定是否检测到了停止车辆4(步骤s22)。如已经说明的,停止车辆4为pudo动作预期结束的停止车辆2。例如,在检测到了启动动作的情况下,停止车辆2的pudo动作预期结束。作为另一个例子,在检测到了方向指示器的点亮动作的情况下,停止车辆2的pudo动作预期结束。作为又一个例子,在检测到了车门的关闭动作的情况下,停止车辆2的pudo动作预期结束。作为又一个例子,在夜间检测到了前照灯的点亮动作的情况下,停止车辆2的pudo动作预期结束。各种动作的信息包含在周边状况信息433中。例如,各种动作的检测时使用基于图像信息的特征量构建的判定模型。
91.在步骤s22的判定结果为肯定的情况下,处理器41将目标位置tswt设定于位于区域zfr内且与停止车辆4的横向位置相比位于上游的位置(步骤s23)。停止车辆4的横向位置的设定例与图13所说明的停止车辆3相同。
92.步骤s23之后,处理器41判定停止车辆4是否移动到了区域zfpd外(步骤s24)。停止车辆4的移动是以停止车辆4的后部或前部的检测位置作为基准来判定的。停止车辆4的检测位置的信息包含在周边状况信息433中。在停止车辆4的检测位置位于区域zfpd外的情况下,处理器41判定为停止车辆4移动到了区域zfpd外。
93.在步骤s24的判定结果为肯定的情况下,处理器41进行步骤s15的处理。步骤s15的处理如图9所说明的。
94.在步骤s22的判定结果为否定的情况下,处理器41进行步骤s16的处理。步骤s16的处理如图9所说明的。
95.2-2-3.车辆停靠位控制处理的第三示例第二实施方式的第三示例涉及的车辆停靠位控制处理的流程适当引用了图13和图14的说明。具体地,处理器41在图13说明的步骤s21的处理之后进行图14说明的步骤s22以后的处理。由此,来说明第三示例涉及的车辆停靠位控制处理的流程。
96.2-3.效果根据以上说明的第二实施方式,在车辆停靠位控制处理中,目标位置tswt被设定在区域zfr内且与入口ent不同的位置。因此,自动驾驶车辆1能够无需困在入口ent处而等待至区域zfpd出现空闲空间sfpd。
97.此外,根据第一示例,能够避免妨碍停止车辆2(包括停止车辆3)启动后的行驶。此外,根据第一示例,与目标位置tswt被设定在入口ent处的情况相比,能够尽早结束自动驾驶车辆1的pudo动作。在这方面,第二示例也是如此。即,根据第二示例,通过在pudo动作预期结束的停止车辆3启动后立即开始自动驾驶车辆1的pudo动作,能够尽早结束自动驾驶车辆1的pudo动作。这导致无人驾驶接送服务的便利性的提高。根据第三示例,能够享受第一
示例和第二示例得到的效果。
98.3.第三实施方式接下来,参照图15~17说明本发明的第三实施方式。另外,第三实施方式涉及的自动驾驶方法是通过第三实施方式涉及的自动驾驶系统来实现的。此外,以下,适当省略了与第一和第二实施方式的说明重复的说明。
99.3-1.概要在第一和第二实施方式中,在预期判定的结果为否定的情况下,设定了目标位置tswt。此外,在设定目标位置tswt时,进行了结束预期判定。在第三实施方式中,在设定目标位置tswt之后,进行是否检测到了后续车辆的判定。后续车辆是在自动驾驶车辆1的后方处由自动驾驶车辆1检测到向区域zfr进入的进入动作的车辆。以下,为了便于说明,将是否检测到了后续车辆的判定也称为“后续车辆判定”。以下,说明第三实施方式的几个例子。
100.3-1-1.第一示例图15是说明第三实施方式的第一示例的特征的图。如图15所示,在第一示例中,在区域zfpd不存在空闲空间sfpd。因此,预期判定的结果变为否定。该前提与第二实施方式的第一~第三示例相同。
101.在图15所示的第一示例中,目标位置tswt被设定在入口ent处。此外,在第一示例中,通过自动驾驶车辆1检测到了后续车辆5。因此,后续车辆判定的结果变为肯定。在第一示例中,设定了暂时通过车辆停靠位crp后返回车辆停靠位crp的行驶路径。该行驶路径中也包含公共道路pbr上的路径。通过设定这种行驶路径,能够避免妨碍向区域zfr进入的后续车辆5的通行的状况的同时,等待至区域zfpd出现空闲空间sfpd。
102.3-1-2.第二示例假定后续车辆5的进入动作的目的是在车辆停靠位crp内进行pudo动作的情况。因此,在第三实施方式的第二示例中,在后续车辆判定的结果为肯定的情况下,进行是否预期为自动驾驶车辆1短时等待的判定。“短时等待”是指自动驾驶车辆1的等待动作的所需时间在短时间内结束。以下,为了便于说明,将是否预期短时等待的判定也称为“短时等待判定”。
103.短时等待判定是基于图11说明的是否检测到停止车辆4而进行的。如已经说明的,停止车辆4为pudo动作预期结束的停止车辆2。因此,检测到停止车辆4是指在不久的将来预期自动驾驶车辆1进行pudo动作。如果是这样,则与图15说明的第一示例所述暂时通过车辆停靠位crp的方式相比,等待这个将来的pudo动作的机会的方式更有效率。因此,在第二示例中,在短时等待判定的结果为肯定的情况下,保持目标位置tswt。通过保持目标位置tswt,能够将妨碍向区域zfr进入的后续车辆5的通行的状况抑制到最小的同时等待区域zfpd出现空闲空间sfpd。
104.3-2.自动驾驶系统3-2-1.车辆停靠位控制处理的第一示例图16是示出第三实施方式的第一示例涉及的车辆停靠位控制处理的流程的流程图。图16所示的例程是接着图9的步骤s16的处理进行的。另外,步骤s11~s15的处理如图9所说明地执行。此外,图16所示的例程可以接着图13的步骤s21的处理或者图14的步骤s25的处理进行。
105.步骤s16之后,处理器41判定是否检测到后续车辆5(步骤s31)。如已经所说明的,后续车辆5是在自动驾驶车辆1的后方进行向区域zfr进入的进入动作的车辆。后续车辆5的检测例如是基于与自动驾驶车辆1之间的车间距离进行的。作为另一个例子,在检测到使进入车辆停靠位crp的方向的方向指示器点亮的车辆的情况下,该车辆被识别为后续车辆5。车间距离的信息是基于周边状况信息433另外计算的。例如,上述判定模型被用于方向指示器的点亮动作的检测。
106.在步骤s31的判定结果为肯定的情况下,处理器41设定行驶路径(步骤s32)。该行驶路径是暂时通过车辆停靠位crp后返回车辆停靠位crp的路径。然后,处理器41控制自动驾驶车辆1以使得自动驾驶车辆1在该行驶路径上行驶。自动驾驶车辆1到达入口ent之后进行的处理如图9所说明。
107.在步骤s31的判定结果为否定的情况下,处理器41保持目标位置tswt(步骤s33)。也就是说,如果进行步骤s33的处理,则入口ent继续被设定为目标位置tswt。
108.3-2-2.车辆停靠位控制处理的第二示例图17是示出第三实施方式的第二示例涉及的车辆停靠位控制处理的流程的流程图。图17所示的例程的处理的流程基本上与图16说明的相同。因此,以下,说明在步骤s31的判定结果为肯定的情况下进行的处理。
109.在步骤s31的判定结果为肯定的情况下,处理器41进行是否预期为进行短时等待的判定(步骤s34)。步骤s34的处理与图14的步骤s22的处理相同。也就是说,在步骤s34中,判定是否检测到停止车辆4。然后,在步骤s34的判定结果为否定的情况下,进行步骤s35的处理。步骤s35的处理与图16的步骤s32的处理相同。
110.3-3.效果根据以上说明的第三实施方式,在车辆停靠位控制处理中,在设定目标位置tswt之后进行后续车辆判定。然后,根据第一示例,在后续车辆判定的结果为肯定的情况下,设定了暂时通过车辆停靠位crp后返回车辆停靠位crp的行驶路径。因此,能够避免妨碍向区域zfr进入的后续车辆5的通行的状况,同时能够等到在区域zfpd出现空闲空间sfpd为止。
111.另一方面,根据第二示例,在后续车辆判定的结果为肯定的情况下,进行短时等待判定。然后,在短时等待判定的结果为肯定的情况下,保持目标位置tswt。在不是这样的情况下,设定第一示例说明的行驶路径。因此,能够将妨碍向区域zfr进入的后续车辆5的通行的状况抑制到最小,同时能够等到在区域zfpd出现空闲空间sfpd为止。此外,也能够避免正在等待自动驾驶车辆1的pudo动作的用户usr对自动驾驶车辆1通过车辆停靠位crp感到不舒服。这导致无人驾驶接送服务的便利性的提高。标号的说明
112.1 自动驾驶车辆2、3、4 停止车辆5 后续车辆40 控制装置41 处理器42 存储装置43 驾驶环境信息
44 用户信息100 自动驾驶系统crp 车辆停靠位drw 设施的出入口sfpd 空闲空间tspd 用于进行pudo动作的目标位置(目标乘降位置)tswt 用于进行等待动作的目标位置(目标等待位置)zfp 行人用区域zfpd pudo用区域zfr 行驶用区域zfv 车辆用区域
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。