1.本实用新型涉及吸附式机器人领域,特别涉及一种压力装置及吸附式机器人。
背景技术:
2.近年来,我国光伏发电行业发展迅速,但光伏面板极易受到环境的影响,面板积灰及热板效应,严重制约光伏发电站发电效率,因此定期清理积灰和脏污,成了光伏电站必须面对的课题。由于人工清洁费时费力,效率低下,成本较高,采用清洁机器人清扫太阳能面板的技术应运而生。
3.为了获得最佳发电效率,光伏面板通常需要倾斜设置的,位于不同纬度地区的光伏电站,其光伏面板的倾斜角度(面板与水平面的夹角)也各不相同。现有技术的光伏面板,其外表面通常比较光滑,摩擦系数普遍较小,清洁机器人在面板上行进时容易出现打滑现象,这是必须要解决的技术问题。
4.若光伏面板的倾斜角度较小,清洁机器人底部设置履带,加大履带的摩擦系数,加大履带与面板的接触面积,从而可以提升履带与面板之间的摩擦力,以加强清洁机器人的“抓地力”。若光伏面板的倾斜角度较大,仅加大履带与面板的摩擦力还是不能完全避免机器人发生打滑现象,这就需要用其他技术手段来提升机器人的抓地力。
5.针对前述问题,专利文件cn111942490a提供了一种吸附式机器人,如图1所示,吸附式机器人包括吸附装置930以及负压装置940。吸附装置930包括安装板91、风箱92以及风阻框93;风箱92设于安装板91下方,且连接至安装板91;风阻框93为环状,风阻框93的顶部密封式连接至安装板91的边缘处。负压装置940包括真空设备941以及真空管道942;真空管道942的一端连通至真空设备941,其另一端通过一通孔94连通至风箱92。风箱92的下风阻框32上设有多个均匀分布的气孔95,用于产生吸附力。在风阻框93和风箱92之间还包括环形的缓冲框96,用于缓冲风阻框93的应力。但是,该结构的吸附式机器人存在如下问题:第一,风箱92底面的气孔95尺寸较小,容易被异物堵塞,导致吸附效果减弱;第二,真空管道942是圆形管道,如需保证通气量,提供足够的负压,必须保证真空管道942的横截面积大于一定阈值,圆形管道占用空间较大;真空设备941被固定在车体内,需要设置安装支架;由于车体内空间有限,安装支架、圆形管道占用空间过大,会影响车体内其他部件的布局,如水箱和电池体积都会因此受到限制,影响机器人的续航能力。第三,如果保证水箱和电池体积足够,管道和真空设备的尺寸就会受限制,导致吸附效果较差,当面板倾斜角度大于30度或40度时,机器人很容易从面板滑落;因此该方案一般只能适用于倾斜角度小于20度的光伏面板。第四,设置风阻框93与缓冲框96,使得风阻框93与面板表面维持接触,风阻框93为弹性材质,在车体静止状态下可以防止风阻框93与面板衔接处漏气;但在车体行进中,由于缓冲框96不能对风阻框93施加向下的持续压力,面板会刮动风阻框93,使得风阻框93发生形变,风阻框93与面板衔接处还是可能会漏气,这样就会影响整体的吸附效果,打滑现象还是会时有发生,车体稳定性差。第五,真空设备941、真空管道942及安装支架需要分别安装在车体内,需要安装三次,而车体内空间有限,其安装操作繁琐。
技术实现要素:
6.本实用新型的目的在于,提供一种压力装置及吸附式机器人,以解决现有吸附式机器人存在的吸附压力不足导致风阻框与面板衔接处易漏气,以及风阻框吸附压力不足、仅能适用于倾斜角为20度以下的光伏面板的技术问题。
7.为实现上述目的,本实用新型提供一种压力装置,所述压力装置包括底座、固定板、安装孔、活动杆以及弹簧;所述底座被安装至一固定基础的下表面,所述固定基础为一板体;所述固定板平行于所述底板;所述固定板设有安装孔,与所述底座相对设置;所述活动杆的一端设有头部,铰接至所述底座,其另一端插入至所述安装孔内,所述活动杆的外径小于所述安装孔内径;所述弹簧套设于所述活动杆外部,其一端抵接至所述头部,其另一端抵接至所述固定板的下表面。
8.进一步地,所述活动杆外径与所述安装孔内径的比值为0.5
‑
0.9。
9.进一步地,所述底座为螺杆,螺纹连接至车体的下表面。
10.进一步地,所述底座的头部设有螺杆凹槽,所述活动杆的头部安装至所述螺杆凹槽内。
11.进一步地,所述底座的头部有两个相对的第一通孔,贯穿于螺杆凹槽的两个侧壁;所述活动杆的头部有第二通孔,与所述第一通孔相对设置;所述压力装置还包括一转动杆,所述转动杆插入至所述第一通孔及第二通孔。
12.进一步地,所述转动杆的两端设有环形槽,所述环形槽内设有环形限位板;所述环形限位板的外径大于第一通孔的内径。
13.进一步地,所述活动杆远离其头部的一端的外侧壁设有下凹的环形槽,所述环形槽内设有环形限位板,所述环形限位板的外径大于安装孔的内径。
14.本技术还提供一种吸附式机器人,其包括前文任一项所述的压力装置。
15.进一步地,所述吸附式机器人包括车体、风阻框、缓冲框;所述车体包括底板,所述固定基础为所述车体的底板;所述风阻框为环状,其顶部密封式连接至所述车体的底板的下表面;所述缓冲框为环状,其顶部连接至所述底板的下表面,其底部连接至所述风阻框的上表面;所述缓冲框的高度是可调节的。
16.进一步地,所述压力装置的底座连接至所述车体的底板,其固定板连接至所述风阻框。
17.本实用新型的有益效果在于,提供一种压力装置及吸附式机器人,采用设置限位柱支撑风阻框内侧壁,设置压力装置向下压迫风阻框,使其在行进时不会发生较大形变,防止风阻框与面板衔接处漏气导致机器人打滑,确保吸附式机器人可以在倾斜角为30度以上(甚至40度以上)的面板上行进并完成清洁作业。
附图说明
18.图1为专利文件cn111942490a中吸附式机器人的所述吸附装置和所述真空设备的结构示意图;
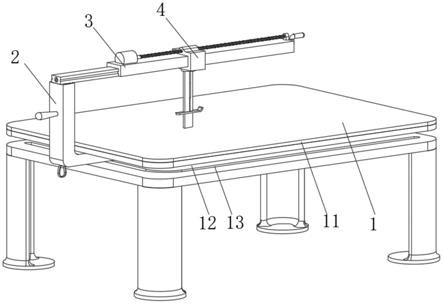
19.图2为本实用新型实施例1中所述吸附式机器人的俯视的结构示意图;
20.图3为本实用新型实施例1中所述吸附式机器人的仰视的结构示意图;
21.图4为本实用新型实施例1中所述吸附式机器人的底部侧视的结构示意图;
22.图5为本实用新型实施例1中所述吸附装置安装于所述车体下表面的结构示意图;
23.图6为本实用新型实施例1中所述吸附装置安装于所述车体下表面的侧视结构示意图;
24.图7为本实用新型实施例1中所述负压装置安装于所述车体上表面的结构示意图;
25.图8为本实用新型实施例1中所述负压装置安装于所述车体上表面的侧视结构示意图;
26.图9为本实用新型实施例1中所述负压装置的结构示意图;
27.图10为本实用新型实施例1中所述负压装置一个方向上的部分结构示意图;
28.图11为本实用新型实施例1中所述第一壳体的结构示意图;
29.图12为本实用新型实施例1中所述风机的结构示意图;
30.图13为本实用新型实施例1中所述缓冲框的分解结构示意图;
31.图14为本实用新型实施例2中所述吸附装置安装于所述车体下表面的结构示意图;
32.图15为本实用新型实施例2中所述风阻框的部分结构示意图;
33.图16为本实用新型实施例2中所述压力装置的部分结构在一个方向的示意图;
34.图17为本实用新型实施例2中所述压力装置的部分结构在另一个方向的示意图;
35.图18为本实用新型实施例2中所述压力装置的部分结构的分解示意图。
36.图中各个部件标号如下:
37.吸附式机器人100,
38.车体10,清扫装置20,吸附装置30,负压装置40,
39.底板11,侧板12,
40.缓冲框31,风阻框32,限位柱33,弹性环34,压力装置35,
41.固定基础41,安装支架42,风机43,紧固件44,
42.第一安装板45,第二安装板46,第一安装孔47,第二安装孔48,
43.环形顶板311,环形底板312,折叠弹性圈313,环形凹槽321,
44.底座351,固定板352,安装孔353,活动杆354,弹簧355,转动杆356,
45.通孔411,第一壳体421,第一入风口422,第一出风口423,
46.第二壳体431,第二入风口432,第二出风口433,出风管434,
47.半圆弧形部3201,直线形部3202,螺杆凹槽3511,第一通孔3512,
48.第二通孔3541,环形槽3542、3561,环形限位板3543、3562。
具体实施方式
49.以下参考说明书附图完整介绍本实用新型的优选实施例,使其技术内容更加清楚和便于理解。本实用新型可以通过许多不同形式的实施例来得以体现,其保护范围并非仅限于文中提到的实施例。
50.在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的部件以相似数字标号表示。本实用新型所提到的方向用语,例如,上、下、前、后、左、右、内、外、上表面、下表面、侧面、顶面、底部、前端、后端、末端等,仅是附图中的方向,只是用来解释和说明本实用新型,而不是用来限定本实用新型的保护范围。
51.当某些部件被描述为“在”另一部件“上”时,所述部件可以直接置于所述另一部件上;也可以存在一中间部件,所述部件置于所述中间部件上,且所述中间部件置于另一部件上。当一个部件被描述为“安装至”或“连接至”另一部件时,二者可以理解为直接“安装”或“连接”,或者一个部件通过一中间部件间接“安装至”或“连接至”另一个部件。
52.实施例1
53.如图2、图3、图4所示,实施例1中提供一种吸附式机器人100(下文可简称机器人),吸附式机器人100包括一车体10,车体10可以在一倾斜设置的光滑平面上稳定地行进,本实施例中所述光滑平面为光伏面板(也称太阳能面板)或者多个光伏面板组成的面板阵列上行驶进行清扫。本实施例中,光伏面板的倾斜角度(即光伏面板与水平面的夹角)可以为0
‑
60度之间的任一角度值,优选30
‑
40度之间。面板阵列上的每一光伏面板的边缘处可选择地设有边框,任意两个相邻的光伏面板之间存在间隙,吸附式机器人100具有跨越面板边框和面板间隙的能力。在其他实施例中,本实用新型所述光滑平面也可以为冰面或玻璃板。
54.可选择地,车体10的前端或后端可以安装一清扫装置20,包括用于清扫面板表面的滚刷,包括带动滚刷旋转的电机,包括喷淋清洁剂的喷头,还可以包括吸尘风口,等等。当吸附式机器人100在光伏面板上前进或后退时可通过清扫装置20对光伏面板进行清扫。如图3、图4所示,在车体10两侧分别设有履带结构的车轮,在车体10下表面设有吸附装置30,在车体10内或车体10上设有负压装置40,负压装置40连通至吸附装置30。
55.如图5、图6、图7、图8所示,负压装置40包括车体10的底板41、安装支架42以及风机43。底板41设有一通孔411;底板41为车体10内多个部件的固定基础,风机43通过安装支架42固定连接至底板41上方。
56.如图9、图10、图11、图12所示,安装支架42包括第一壳体421以及设于第一壳体421内的第一风道;第一壳体421内设有一空腔,形成第一风道;第一风道的两端分别为第一入风口422及第一出风口423;第一风道的最小横截面积大于或等于第一入风口422的面积。第一壳体421被安装至车体10的底板41的顶面;第一入风口422位于第一壳体421底面,且密封连通至通孔411;第一出风口423位于第一壳体421侧面,且连通至第一入风口422。风机43包括第二壳体431、转轴、扇叶、第二风道;所述转轴、扇叶安装于所述第二壳体431内。所述第二风道设于第二壳体431内,所述第二风道的两端分别为第二入风口432、第二出风口433,第二出风口433连通至第二入风口432。第二壳体431被安装至第一壳体421的侧面;第二入风口422位于第二壳体431的表面,且密封连通至第一出风口423。
57.安装支架42既是固定风机43的安装架,也是通风管道,减少了负压装置40的部件数量,减少了负压装置40的占用空间。由于车体10空间小,现有的支架、管道及风机若需分别安装至车体内,操作比较麻烦。本实施例中,在车体10外将风机43先装在安装支架42上,使得二者形成一体结构,只需将安装支架42安装在车体10底面即可,安装中需要使得管道的入风口与通孔411相对设置且彼此连通;安装过程简单方便。
58.本实施例中,第一壳体421为扁平状的斜柱体,可以减小第一壳体421的长度、宽度及高度,可以降低机器人整体高度,减少负压装置占用的空间,也可以提升结构强度。第一壳体421在车体底板41(固定基础)上表面的投影的长度与该投影的宽度的比值为2
‑
10。第一壳体421在车体底板41(固定基础)上表面的投影为矩形、圆角矩形或椭圆形。具体的,第一壳体421为扁平状一方面能够减少第一壳体421的宽度,从而使得第一壳体421的宽度不
会太大,能提升结构强度,而且其长度可以设置的更长时也不会受力变形,另一方面能够使第一壳体421在车体底板41位置的通孔411形成矩形、圆角矩形、长圆形或椭圆形,能够利用第一壳体421内的空腔结构形成第一风道,不仅减少了整体重量,而且使得第一壳体421同时具有通风及支撑架的作用。第一壳体421为斜柱体结构,可以减小第一壳体421的高度的同时增长第一壳体421的长度,从而使得斜柱体结构的第一壳体421的重心相对竖直体结构第一壳体421的重心更低,增加了吸附式机器人100的重心稳定性。第一壳体421与车体底板41的倾斜角度在30度至60度之间,优选为40度、45度、50度。
59.本实施例中,第二壳体431在车体底板41(固定基础)上表面的投影的长度与该投影的宽度的比值范围为1.2
‑
10,优选1.5、2、3、4、5、6。第一壳体421、第二壳体431都被设置为扁平形状的不规则柱体,它们的高度大于其长度和其宽度,使得第一壳体421、第二壳体431在车体底板41上表面的投影尽量小。这样,在保证风口面积的前提下,尽量节省安装支架与通风管道在车体10内占用的空间,由于车体10内空间有限,可以使得电池和水箱体积可以更大,从而增强机器人的续航能力。
60.本实施例中,车体底板41上的通孔411及第一入风口422的形状及尺寸相同,且彼此连通;通孔411包括矩形或圆角矩形或长圆形;通孔411的长度与其宽度的比值范围为2
‑
10,优选2、3、4、5及6。优选的,通孔411及第一入风口422均为腰形孔,一方面可以尽量扩大入风口422的横截面积,以增大通气量和吸附力,另一方面可以减小第一壳体421在车体底板41上表面的投影面积,有效缩短第一壳体421的长度、宽度及高度,减少第一壳体421的占用空间。
61.所述第一风道下半部分为扁平的管状,优选地,第一风道内每一处横截面的面积都大于或等于第一入风口422的面积,第一出风口423的面积423大于或等于第一入风口422的面积,能够有效增大所述第一风道的通气量,以提升吸附装置30的吸附力。
62.风机43包括第二壳体431、转轴、扇叶、第二风道;所述转轴、扇叶安装于第二壳体431内,所述转轴垂直于设有第一出风口422的第一壳体421的侧面;所述扇叶被安装至所述转轴侧壁。风机启动后,转轴带动扇叶转动,将空气从第一入风口421抽到第一出风口422。所述扇叶的长度与其宽度的比值范围为1
‑
10,优选1.2,1.5,1.8或2,第二壳体431近似为较扁的圆柱体,使得第二壳体431在车体底板41的投影面积尽量小。
63.本实施例中,所述负压装置40还包括紧固件44,第二壳体431被紧固件44可拆卸式安装至第一壳体421的侧面,位于第二壳体431表面的第二入风口422密封连通至第一出风口423。从附图中可以看出,风机43通过紧固件44安装于安装支架42上,可悬空式设于车体底板41(固定基础)的上方,从而安装支架42具有形成所述第一风道及固定安装所述风机43的双重功能。
64.如图9、图10、图11、图12所示,本实施例中,负压装置40还包括第一安装板45、第二安装板46、第一安装孔47、第二安装孔48以及紧固件;多个三角形的第一安装板45突出于第一壳体421的顶面或侧壁;第二安装板46突出于第二壳体431的顶面或侧壁,且与第一安装板45相对设置。第一安装板45或第一壳体421的一侧壁设有第一安装孔47;第二安装板46或第二壳体431的一侧壁设有第二安装孔48,且与所述第一安装孔47相对设置;所述紧固件优选螺栓,所述螺栓包括螺杆及螺母,所述螺杆穿过第一安装孔47及第二安装孔48,用螺母将其锁紧。
65.所述吸附式机器人包括设于车体10上的吸附装置30;车体10包括底板11以及位于底板11两侧的侧板12,底板11与两侧的侧板12形成载重腔;车体10的底板11为固定基础;吸附装置30其为环状,其顶部密封式连接至底板11的下底面;其中,通孔411位于吸附装置30在底板11上的投影区域内,负压装置40被安装于所述底板11顶面。吸附装置30与车体的底板11围成一个负压腔,当风机启动时,负压腔将被抽真空,从而有效防止车体10从光伏面板上滑落。
66.与背景技术中方案相比,通孔411设于负压腔顶部,通孔的面积远大于背景技术的风箱92的多个气孔的总面积,吸附力更大;即使设置比背景技术中的风机功率更小的风机,也可以保证吸附效果,从而可以减轻风机的重量和体积,节省空间,且提升机器人的续航能力。
67.光伏面板的边缘处设有边框(通常为0.5
‑
2厘米),一个光伏面板阵列上的多个光伏面板之间存在间隙(通常1
‑
4厘米),当吸附式机器人100在面板阵列上行进时,需要跨越边框或间隙。如果仅设置一个吸附装置30,当吸附装置30位于边框或间隙上方时,车体10就会失去吸附力,导致机器人从光伏面板上滑落,因此,优选地,吸附装置30需要被设置为两个以上,当有某一个吸附装置30失去吸附力时,其他吸附装置30还能保证吸附效果。
68.当吸附装置30的数量为两个以上时,两个以上吸附装置30沿垂直于所述吸附式机器人的中线排布设置,以保证车体在跨越障碍物时始终存在吸附力。所述中线为所述车体的车头中点与车尾中点的连线。当所述负压装置30的数量为偶数个(如两个或四个)时,车体10的前后两侧设有相同数目的风机,确保前侧部件过障碍物泄压时,后侧部件仍然有效附着,随着设备继续行进,后侧部件过障碍物泄压时,前侧部件着地有效附着。从而保证至少一个负压装置30与光伏面板围成的空间还是可以形成密封区域,维持较好的吸附力。同时确保车体10重心尽可能靠近车体10的中线,保证车体10平衡。
69.本实施例中,吸附式机器人还包括限位柱33,限位柱33突出于底板11的下表面,且位于吸附装置30围成的环形内;限位柱33与吸附装置30的内侧壁相邻设置且相对设置,所述限位柱33与所述吸附装置30的最小距离小于1厘米;限位柱33的高度小于吸附装置30的最小高度。所述限位柱33的数量为两个以上,两个以上限位柱33均匀分布于吸附装置30的内侧壁围成的区域的边缘处。
70.如图4至图6所示,本实施例中,吸附装置30包括缓冲框31以及风阻框32。缓冲框31为环状,缓冲框31的顶部密封式连接至所述车体10的底板11的下表面;缓冲框31的高度是可调节的。
71.如图13所示,缓冲框31包括环形顶板311、环形底板312以及折叠弹性圈313;环形顶板311密封式连接至底板11的下表面;环形底板312密封式连接至风阻框32的上表面;折叠弹性圈313的顶部密封式连接至环形底板312,其底部密封式连接至环形顶板311。折叠弹性圈313能够保持与其相连的环形顶板311、环形底板312的间距,能够具有弹性形变,能在拉长环形顶板311与环形底板312的间距后具有复位作用,而且在车体10行进时拉长环形顶板311与环形底板312的间距以缓冲行进阻力。所述环形顶板311与所述环形底板312的形状均为矩形或圆角矩形或长圆形的环状结构。所述环形顶板311、所述环形底板312以及所述折叠弹性圈313在所述底板11上的正向投影相重合。
72.风阻框32为环状,风阻框32的顶部密封式连接至缓冲框31的下表面,缓冲框31、风
阻框32及车体底板41共同围成负压腔。风阻框32的材质优选硬质橡胶、硬质硅胶或硬质塑料等,耐磨损性良好。风阻框32靠重力下垂,使得风阻框32的底面与光伏面板的上表面相接触。当车体10缓慢行进时,缓冲框31上方随车体向前移动,风阻框32在缓冲框31带动下贴着光伏面板缓慢移动,从而使得负压腔漏气较少,维持较好的吸附效果。
73.风阻框32贴着光伏面板缓慢移动的过程中,缓冲框31的折叠弹性圈313不能变形太大,否则会导致折叠弹性圈313长期处于疲劳状态,容易损坏。如果折叠弹性圈313被拉伸至极限状态,风阻框32与光伏面板之间会产生间隙,导致负压腔漏气。因此,吸附式机器人100还设有限位柱33,限位柱33突出于底板11的下表面,且位于吸附装置30围成的环形内;限位柱33与吸附装置30的内侧壁相邻设置且相对设置。所述风阻框32即为吸附装置30的内侧壁,风阻框32呈环状,具有依次首尾相接的前边框、后边框、左边框及右边框,限位柱33不仅与前边框和后边框相邻设置,而且也与左边框和右边框相邻设置,使得限位柱33在吸附式机器人100在任意方向行进时均可防止风阻框32的偏移距离过大。
74.当车体静止时,限位柱33与风阻框32的最小距离小于1厘米,同时限位柱33与缓冲框31的最小距离小于1厘米;所述限位柱33的高度小于所述缓冲框31与所述风阻框32的最小总高度;当车体10及限位柱33向前移动时,风阻框32短时间内还保持在原位,风阻框32在短时间内相对于车体向后移动。如果移动距离过长,折叠弹性圈313容易损坏,限位柱33可以有效限制风阻框32的移动距离,防止折叠弹性圈313变形太大,避免折叠弹性圈313长期处于疲劳状态。限位柱33的高度小于吸附装置30的最小高度,避免限位柱33底部与光伏面板产生摩擦并导致光伏面板损毁。当车体10向前或向后移动时,风阻框32也会向后或向前移动,两个以上限位柱33与前边框和后边框相邻设置,可以防止风阻框32向前或向后偏移过大。当车体10向左或向右移动时,风阻框32也会向右或向左移动,两个以上限位柱33与左边框和右边框相邻设置,可以防止风阻框32向右或向左偏移过大。
75.本实施例中,风阻框32的纵向截面近似为三角形或梯形,风阻框32顶面的宽度大于其底面的宽度,其底面为外凸的环状弧形面,其顶面直接或间接(通过缓冲框)连接至车体底板11的下表面。风阻框32的内侧壁、外侧壁皆为斜面,便于吸附式机器人100能够跨越面板边框等障碍物。具体的,风阻框32整体呈圆环形,具有皆为斜面的内侧壁和外侧壁,内侧壁和外侧壁的下部间距小于上部间距,内侧壁和外侧壁形成v形,所述内侧壁所处平面与水平面的夹角为30度至60度之间的任一角度,优选为40度、45度、50度;所述内侧壁所处平面与所述外侧壁所处平面的夹角为60度至90度之间的任一角度,优选为65度、70度、75度、80度、85度。所述风阻框32的底面为外凸的环状弧形面,所述风阻框32的顶面直接或间接地密封式连接至一固定基础的下表面。当吸附式机器人100在光伏面板上行进跨越障碍物时,风阻框32的外侧壁与障碍物接触,由于外侧壁为斜面,则能便于风阻框32的外侧壁在障碍物表面滑动而被抬升,当滑动至风阻框32的内侧壁与障碍物接触时,由于内侧壁为斜面,则能便于风阻框32的内侧壁在障碍物表面滑动而顺利下降,从而实现稳定的跨越障碍物。其中所述障碍物为光伏面板200表面上的块状凸起,可以为干燥的鸟粪、砂石等,也可以为相邻两个光伏面板200连接处的条状结构。
76.当车体静止时,风阻框32与光伏面板之间无间隙,吸附效果较好;当车体行进时,风阻框32被缓冲框31拖动,随车体向前滑动,滑动过程中,硬质风阻框32与硬质光伏面板之间存在较大间隙,导致负压腔漏风,会影响吸附效果。本实施例采用风阻框32和缓冲框31的
结合方式形成吸附装置30,缓冲框31通过弹性形变实现了缓冲风阻框32的应力作用,使得风阻框32与光伏面板之间始终紧密贴合。
77.其中,所述缓冲框31、所述风阻框32及所述限位柱33共同形成缓冲结构,通过缓冲框31的弹性形变实现了能够缓冲风阻框32的应力作用,使得风阻框32与光伏面板之间始终紧密贴合,可以实现风阻框32与光伏面板之间无间隙,吸附效果较好;且限位柱33支撑风阻框32内侧壁,使其在行进时不会发生较大形变,防止风阻框32与面板衔接处漏气导致机器人打滑,确保吸附式机器人100可以在倾斜角为30度以上(甚至40度以上)的面板上行进并完成清洁作业。
78.如图15所示,吸附装置30还包括弹性环34,其为管状环,被安装至风阻框32的下表面。具体地说,风阻框32底面设有环形凹槽321,所述风阻框32的底面为外凸的环状弧形面,所述环形凹槽321下凹于环状弧形面中部;所述环形凹槽321包括槽口,弹性环34固定至所述环形凹槽321内,且从其槽口处延伸至风阻框32的外部,弹性环34暴露在风阻框32外部的部分,其高度约为0.2
‑
1厘米,优选0.5、0.6、0.7厘米。弹性环34可以减小风阻框32与光伏面板之间的间隙,使得负压腔漏气尽量少,以提升风阻框32的吸附效果。
79.其中,弹性环34的纵向横截面为圆形或圆角矩形。当弹性环34的横截面为圆形时,一方面可以在吸附式机器人100跨越障碍物时,弹性环34的表面在障碍物表面滑动而被抬升,然后弹性环34的表面与障碍物表面滑动而顺利下降,从而实现稳定的跨越障碍物;另一方面,圆形结构能够提升弹性恢复性能,便于增加弹性环34抗形变性能。当弹性环34的横截面为矩形时,可以相对圆形横截面降低吸附式机器人100的高度,此时只需将弹性环34的宽度设置为与环形凹槽321的宽度相同,即可稳固的将弹性环34固定至所述环形凹槽321内,而且弹性环34不需要凸出于环形凹槽321很多,仅需将风阻框32底面抬升脱离光伏面板即可,而且弹性环34的底面为长条状,能够增加与光伏面板之间的接触面积,确保风阻框32的弹性环34可以被贴合至光伏面板,且产生较大摩擦力,进一步提升抓地效果及吸附效果。
80.风阻框32包括两个半圆弧形部3201以及两个直线形部3202,两个半圆弧形部3201即为所述风阻框32的左边框和右边框,两个直线形部3202即为所述风阻框32的前边框和后边框。直线形部3202的两端分别对应连接两个半圆弧形部3201的端部,亦即每一半圆弧形部3201的一端连接至一直线形部3202的一端,其另一端连接至另一直线形部3202的一端;半圆弧形部3201的材质优选为硬质塑料,直线形部3202的材质优选为硬质橡胶,从而半圆弧形部3201的硬度小于半圆弧形部3201的硬度,半圆弧形部3201能够起到缓冲作用,而且半圆弧形部3201实现支撑固定直线形部3202的功能。
81.本实施例通过设置安装支架具有形成所述第一风道及固定安装所述风机的双重功能,减少了部件数量,减少了占用空间,安装简单方便。并且通过增大通孔及第一风道的横截面,且直接将风机的出风口与通孔对应连接,避免了气孔易堵塞的情形,不仅增大了通气量和吸附力,而且有效缩短第一壳体的长度,从而减小了纵向长度,并能设置小功率的风机以减轻重量,从而负压装置体积小重量轻,能够减少吸附式机器人整体体积,显著提高了吸附式机器人的附着力,并且设置限位柱支撑风阻框使其不在行进时发生形变,避免风阻框易漏气导致整机打滑,确保设备可以在斜度20度以上,甚至于35度及以上面板上进行可靠地清洁作业。目前可在40度倾斜角度的平面上运行,后期根据结构性能优化,爬坡角度将继续提升。
82.实施例2
83.如图14所示,在实施例2中包含实施例1的全部技术特征,其区别在于,为了进一步提升吸附效果,在实施例2中所述吸附装置30还包括压力装置35。压力装置35用以向所述风阻框32施加远离所述底板11方向的压力。如图13、图14、图16、图17、图18所示,本实施例中,压力装置35的一端连接至底板11,其另一端连接至风阻框32,用以向下压迫风阻框32,使得风阻框32贴附在面板上,压力装置35对风阻框32提供向下的压力,使得风阻框32尽量贴合至光伏面板的上表面,风阻框32下表面的弹性环34,可以保证负压腔的密封性,进一步提升吸附式机器人100的附着力,可在0
‑
40度倾斜角度的倾斜平面上运行。在图15中,第二出风口433与一出风管434连接,出风管434穿过底板11向下排风。
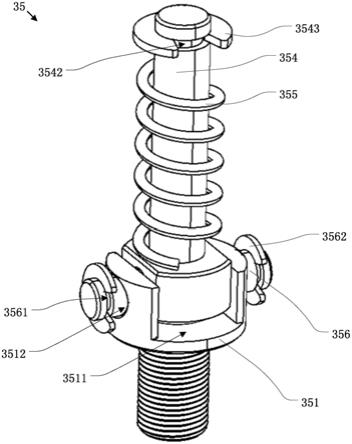
84.本实施例中,压力装置35包括底座351、固定板352、安装孔353、活动杆354以及弹簧355;底座351被安装至所述底板11的下表面;固定板352突出于风阻框32内侧壁,且平行于底板11;安装孔353贯穿于固定板352,且与底座11相对设置;活动杆354的一端设有头部,铰接至底座351,其另一端插入至安装孔353内,活动杆354的外径小于安装孔353内径;弹簧355套设于活动杆354外部,其一端抵接至所述头部,其另一端抵接至固定板352的下表面。压力装置35使得风阻框32受到向下的压力,确保风阻框32的弹性环34可以被贴合至光伏面板,可以进一步提升吸附效果。在压力作用下,弹性环34产生形变,贴合至光伏面板,产生较大摩擦力,进一步提升抓地效果。如果活动杆354上端固定至车体10底部,其下端固定至风阻框32,风阻框32就会被锁定至车体10,风阻框32会与车体10完全同步移动,缓冲框31无法发挥作用。因此,本实施例中,活动杆354外径与安装孔353内径的比值为0.5
‑
0.9,活动杆354的外侧壁与安装孔353的内侧壁之间存在一定间隙,使得活动杆354可在安装孔353内晃动一定角度,优选地,该角度小于10度或20度或30度。
85.车体移动时,活动杆354上端铰接至车体10底部,可以在一定角度内转动;活动杆354下端可在风阻框32的安装孔353内小幅度晃动,因此,可以使得风阻框32可以相对于车体10发生晃动。
86.能够使得风阻框32在吸附式机器人100行进时缓冲一定距离,避免刚性拖拽。压力装置35还具有与限位柱33相似的功能,能够限制风阻框32的滑动距离,避免风阻框32易漏气导致整机打滑。
87.底座351为螺杆,螺纹连接至车体10的下表面。车体10下方的底座351头部设有螺杆凹槽3511,活动杆354头部与螺杆凹槽3511形状相应,活动杆354头部安装至螺杆凹槽3511内,活动杆354头部铰接至底座351。
88.具体地说,底座351头部有两个相对的第一通孔3512,贯穿于螺杆凹槽3511的两个侧壁;活动杆354头部有第二通孔3541,与第一通孔3512相对设置;转动杆356插入至第一通孔3512及第二通孔3541,转动杆356两端的外侧壁设有下凹的环形槽3561,环形槽3561内设有环形限位板3562,环形限位板3562的外径大于第一通孔3512的内径,可以使得转动杆356的一端可转动式安装至第一通孔3512中,且不会从第一通孔3512滑出,使得活动杆354头部可转动式安装至螺杆凹槽3511内,使得活动杆354头部铰接至底座351。活动杆354远离其头部的一端的外侧壁下凹的环形槽3542,内设有环形限位板3543,环形限位板3543的外径大于安装孔353的内径,可以使得活动杆354的一端可转动式或可滑动式安装至风阻框的安装孔353,且不会从安装孔353滑出。
89.本实用新型的有益效果在于,提供一种压力装置及吸附式机器人,通过设置安装支架具有形成所述第一风道及固定安装所述风机的双重功能,减少了部件数量,减少了占用空间,安装简单方便。并且通过增大通孔及第一风道的横截面,且直接将风机的出风口与通孔对应连接,避免了气孔易堵塞的情形,不仅增大了通气量和吸附力,而且有效缩短第一壳体的长度,从而减小了纵向长度,并能设置小功率的风机以减轻重量,从而负压装置体积小重量轻,能够减少吸附式机器人整体体积,显著提高了吸附式机器人的附着力,并且设置限位柱支撑风阻框使其不在行进时发生形变,避免风阻框易漏气导致整机打滑,确保设备可以在斜度30度以上,甚至于斜度在40度以上的面板上进行可靠地清洁作业。而且通过设置压力装置以压迫所述风阻框贴附在面板上,压力装置对风阻框提供吸附正压力,配合安装至所述风阻框的下表面的弹性环保证了密封性,进一步保证了吸附式机器人的附着力,确保可在不稳定工况下稳定可靠运行,目前可在40度倾斜角度的平面上运行,后期根据结构性能优化,爬坡角度将继续提升。
90.以上仅是本实用新型的优选实施方式,使本领域的技术人员更清楚地理解如何实践本实用新型,这些实施方案并不是限制本实用新型的范围。对于本技术领域的普通技术人员,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。