1.本发明涉及一种用于经由多个单独速度可控的驱动单元来控制移动底盘组件、特别是具有至少三个或四个履带底盘的履带系统或移动传送桥系统的的移动的方法和装置。特别地,本发明涉及根据各个独立的或选择性的权利要求的前序部分的方法和装置。
背景技术:
2.具有用于在多个单独底盘上支撑上部结构的多个驱动单元的底盘组件必须满足关于上部结构的机械应力和安全相关支撑的高要求。然而,这种组件还意图适于在崎岖地形上移动,或者至少针对尽可能自由地可变选择的移动路径是可控的。特别是,在松散材料的材料流动和材料处理技术领域,这些要求涉及大尺寸,并且因此待管理的力和载荷可以变得非常大。这种组件还可能必须在下垫面上移动,该下垫面让位、以浮动方式安装或者其性质随地点而变化很大。还必须能够以开环和闭环的方式相应安全地和可靠地控制整个组件的移动,并且适应当时的情况,即使当下垫面具有不可预见的性质时,例如下垫面让位或者组件在非计划方向上进行或需要不可预见的移位时。
3.根据一些应用,履带或双履带用于底盘。替代地,使用许多不为履带形式的单独的驱动单元或车轮。
4.到目前为止,这种底盘的移动的激活和控制不可能以特别灵活的方式实现。移动路径和移动的可变性常常受到极大的限制。
5.在以下出版物中,描述了与移动控制有关的一些原理:
6.p.morin,c.samson:motion control of wheeled mobile robots(轮式移动机器人的运动控制),inria,06902sophia
‑
antipolis cedex,法国,2007年8月;出版于:springer handbook of robotics(springer机器人手册),isbn 978
‑3‑
540
‑
30301
‑
5;2008。
技术实现要素:
7.本发明的目的是提供一种方法和装置,该方法和装置具有在开始时描述的特征,由此特别是在底盘具有履带的情况下,能够提高特别是甚至非常大和笨重的底盘组件的移动自由度和可变性。特别地,本发明的目的是允许包括可以彼此独立地定向的至少两个、三个或四个底盘的系统以灵活且稳健的方式移位。
8.该目的通过根据独立专利权利要求的方法和装置来实现。在从属权利要求中阐述了有利的示例性实施例。
9.根据本发明,该目的特别是通过适于运输待传送的材料的移动传送桥系统来实现,该移动传送桥系统具有桥,该桥具有沿着主延伸轴线的传送带,其中,桥布置在能够分别围绕竖直轴线枢转的多个底盘系统上,移动传送桥系统此外还具有散布系统,其中,待传
送的材料能够通过散布系统在传送带上从桥运输到卸载装置上,其中,散布系统通过能够围绕竖直轴线枢转的至少一个移动系统与桥解耦,以用于在下垫面上移动,其中,散布系统包括至少两个承载系统,该至少两个承载系统分别具有至少一个移动系统以便使散布系统在下垫面上移动,其中,每个承载系统布置在散布系统上使得至少两个移动系统侧向包围桥的主延伸轴线,或者其中,每个承载系统布置在散布系统上使得相应的承载系统的至少一个移动系统相对于桥的主延伸轴线布置在一侧上,其中,移动传送桥系统具有开环/闭环控制装置,开环/闭环控制装置耦合到底盘系统和移动系统,并且适于单独激活至少三个底盘和移动系统中的每一个,并且适于单独地设定以下单独的移动特性中的至少两个并且对其彼此依赖地进行控制:相应的底盘/移动系统的移动路径、瞬间定向、速度。这针对各种各样的操作情况和移动要求提供了特别大的可变性和灵活性。已经发现,对单独的甚至一个底盘/移动系统的单独激活和控制也使得可以使整个结构上的应力最小化。尤其是,可以容易地实现对整个系统的计算机辅助控制,特别是无需使用现场人员(仅“通过电线”检查移动路径)。特别地,可以实现仅基于运动学的控制概念,特别是参考单独的前进速度。在这种情况下,控制可以特别地基于平面、准静态移动的动力学。
10.传送桥系统的单独的机械部件例如可以如在公开de 10 2017 216 389a1中所述的那样设计。单独的底盘/移动系统可以分别具有履带底盘,并且一起形成特别是具有履带对和/或双履带对的多履带底盘系统。
11.根据本发明的开环/闭环控制概念的实现不限于传送桥系统。相反,本发明还可以应用于具有多个能够被单独激活的底盘的大量不同组件或设备项目。
12.根据本发明,上述目的相应地还特别地通过一种移动履带系统来实现,该移动履带系统布置在能够分别围绕竖直轴线枢转的多个底盘系统和/或移动系统上,其中,每个底盘系统和每个移动系统具有至少一个特别是具有双履带的履带底盘,其中,底盘和移动系统能够针对其定向彼此独立地定向并且独立于履带系统的上部结构定向,以限定履带系统的移动路径,其中,移动履带系统具有开环/闭环控制装置,该开环/闭环控制装置耦合到底盘系统和移动系统,并且适于单独激活底盘和移动系统中的每一个,并且适于单独地设定以下单独的移动特性中的至少两个并对其彼此依赖地进行控制:相应的底盘/移动系统的移动路径、瞬间定向、速度。这产生了上述优点。特别地,根据本发明的概念可以可选地应用于材料处理装置或没有材料处理任务的设备项目。移动履带系统特别地具有至少三个或四个移动系统。移动履带系统执行例如特别是用于松散材料的材料处理功能,或者可选地执行纯物流功能。
13.根据一个示例性实施例,总共设置至少四个底盘/移动系统。可选地,设置至少两个底盘系统和至少三个或四个移动系统。
14.根据一个示例性实施例,底盘系统和/或移动系统分别包括至少一个履带底盘,履带底盘能够围绕竖直轴线枢转并且具有多个驱动单元(特别是驱动轮),其特别是分别具有至少一个双履带。这也允许在崎岖地形上或在特别高的载荷的情况下或在特别大的尺寸的情况下应用。
15.根据一个示例性实施例,相应的底盘/移动系统的移动路径和/或速度可以仅通过与另外的底盘/移动系统相协调地单独激活相应的底盘/移动系统的单独的驱动单元,特别是参考相应的驱动单元的控制参数
‘
角速度’/
‘
转速’,来控制。这尤其还使得可扩展性容易
成为可能。
16.相应的底盘/移动系统的移动路径例如可以仅通过单独激活底盘/移动系统的驱动单元、特别是通过驱动转向(基于车轮的转向)、特别是通过在相应的底盘/移动系统的横向于行进方向彼此偏移的至少两个驱动单元处设定不同的差动推进,来指定,也就是说不经由转向轴线(特别是没有转向履带,并且没有任何其他几何转向系统)进行转向。在这种情况下,相应的底盘/移动系统可以特别是通过对单独的驱动单元的单独前进进行控制,而以无扭矩的方式围绕至少近似竖直定向/可定向的枢转轴线可自由转动地被安装并且被定向,而没有转向扭矩。
17.在这种情况下,术语驱动转向(基于车轮的转向)可以包括通过制动转向的操作模式,也可选地组合。术语驱动转向可以包括基于链条或车轮的转向、特别是所谓的打滑转向。术语驱动转向特别地包括通过控制行进速度的差异而进行的定向,无论是在单独的双履带上还是针对整个组件。
18.根据一个示例性实施例,所有的底盘和移动系统彼此机械地解耦,并且结果,能够至少围绕相应的竖直枢转轴线相对于彼此并相对于装置的该/一个上部结构彼此独立地定向和被单独驱动,特别地,可以通过指定来自多个驱动单元的驱动的类型和方式来定向(通过控制前进来定向)。这允许特别是也独立于整个系统的底盘的相应设计或数量来进行控制。
19.根据一个示例性实施例,相应的底盘/移动系统的瞬间前进方向和/或移动路径和/或速度能够仅通过指定/限定相应的底盘/移动系统的单独的驱动单元(特别是驱动轮)的角速度/转速来指定。这允许整个反馈控制问题特别地集中在对相应的驱动单元的单个参数的控制上。这尤其使精简和可靠的方法成为可能。
20.根据一个示例性实施例,移动传送桥系统的所有移动路径能够仅通过指定/限定相应的底盘/移动系统的单独的驱动单元(特别是驱动轮)的角速度/转速来指定,其中,每个移动路径是单独的移动路径。结果,连同精简控制概念还确保了大的可变性。
21.根据本发明,上述目的通过一种方法实现,该方法用于激活和控制至少一个移动履带系统、特别是移动履带传送系统形式的移动履带系统的多个底盘/移动系统,该多个底盘/移动系统彼此机械解耦,并且能够分别围绕竖直轴线彼此独立地枢转,并且能够彼此独立地定向和被驱动,其特别是具有传送桥和/或散布机或翻斗车,其中,每个底盘/移动系统能够被单独控制,其中,该底盘/移动系统彼此依赖地被控制,使得能够设定以下单独移动特性中的至少两个,以便针对每个底盘/移动系统单独地指定整个移动履带系统的绝对移动:移动路径、瞬间定向、速度,至少包括移动特性
‘
速度’。这产生了上述优点。特别地,反馈控制问题可以被减少为仅少许或仅单个特性。这尤其使仍然可管理的复杂性成为可能。
22.在这种情况下,整个移动履带系统的绝对移动还可以例如通过两个不同的速度参数来限定:角速度、(线性)直行速度。在这种情况下,也可以参考至少两个空间轴线、特别是参考所有三个空间轴线矢量地限定相应的移动特性。
23.已经发现,基于对单独的轴线的考虑,可以以简洁的方式达到针对整个系统的控制概念。特别地,最初假设对于相应的底盘/移动系统的非完整运动学约束,一方面,可以确定移动的瞬间路径,并且另一方面,还可以确定至少一个参考点处的瞬间速度矢量。在这种情况下,也可以参考p.morin等的出版物来描述整个系统的移动顺序的控制或自动化。特别
地,对两轮机器人的控制可以应用于对相应的底盘/移动系统的控制,并且更具体地,还可以应用于对相应的驱动单元的控制。在p.morin等的出版物中描述的方法特别可以被实现为根据本发明的控制概念的多个控制级中的控制级。与p.morin等的出版物中描述的方法相比,本发明还基于这样的概念:通过设置为不将一个或多个变量(与p.morin的上述出版物中提及的系数相比,特别是k_2、k_3)看作常数而是看作函数,特别是看作相对于在相应的时间点预期的单独底盘的定向的单独底盘的累积角偏差的函数,特别是单独底盘的定向偏差优先于整个系统的定向偏差,来确保整个系统的更高级别的控制。因此,基于p.morin的出版物中描述的控制概念,通过将反馈控制问题分成单独的子问题,甚至对于相对复杂的整个系统,特别是在很大程度上与底盘或驱动单元的数量无关的情况下,也可以提供拓展的控制概念。根据本发明的控制概念是容易扩展的。
24.根据一个实施例,底盘/移动系统彼此依赖地被控制,其中,仅设定以下单独的速度移动特性:角速度(转速)、(线性)直行速度(平移速度)。通过仅参考速度并且通过针对转速和平移速度进行区分,还可以提供稳健的概念。
25.根据一个实施例,底盘/移动系统彼此依赖地被控制,其中,以下单独的移动特性中的至少一个通过移动特性
‘
速度’随时间的积分来推导确定:移动路径、瞬间定向。这允许反馈控制问题也集中在一个(单个)移动特性
‘
速度’上。
26.根据一个实施例,该控制分别针对以下控制分类(控制回路)中的至少一个作为对于每个底盘/移动系统的单独反馈控制问题进行应用:
27.‑
第一反馈控制问题:通过对参考配置、特别是时变参考配置进行参考,来指定移动路径;
28.‑
第二反馈控制问题:通过对整个移动履带系统的设定点移动路径进行参考,来指定移动路径,特别是针对预定速度、特别是预定切向速度。
29.这允许该控制也适于特定的操作情况,特别是针对优先控制标准加权(例如前进速度或位置精度或最小化的结构载荷或应力)。也可以彼此组合地处理反馈控制问题。移动路径的指定也可以依赖于两个反馈控制问题的解决而进行。
30.时变参考配置可以例如依赖于在系统的材料处理(松散材料)或载荷分布方面可变的载荷来预定,例如以避免系统的侧向倾斜超过最大阈值。
31.参考配置可以包括例如指定底盘相对于整个系统(参考点或参考系)和/或相对于彼此的相对定向和距离。
32.参考配置特别地描述了在相应的时间点处意图的姿态(位置和/定向)以及还有在更高级别的整个系统的相应时间点处意图的速度状态(平移和转动)。由此可以确定单独底盘的单独姿态和单独速度状态。因此,单独底盘的姿态的描述和单独速度状态的描述不包括在参考配置中。
33.这里,控制分类还应理解为控制分级或流程图或控制概念,其还可选地包括多个反馈控制问题,特别是具有针对彼此的分级加权。控制分类可以特别地以完全自动化的方式运行而无需人工干预。该控制不需要人工干预。
34.在这种情况下,例如可以通过依赖于涉及移动路径的切向速度来指定或调节履带底盘的单独定向,从而进行沿着设定点移动路径的控制,特别是在移动路径弯曲的情况下。
35.根据一个实施例,该控制按照以下顺序根据反馈控制问题中的至少一个进行(特
别是实时的控制回路):
36.‑
针对履带系统的移动或绝对设定点移动路径的至少一个误差进行限定;
37.‑
确定履带系统的瞬间速度;
38.‑
特别是参考相应的底盘/移动系统的单独瞬间移动路径的单独曲率半径,来确定瞬间单独移动路径和单独速度;
39.‑
参考瞬间绝对速度,来将至少一个控制律、特别是单轴底盘/移动系统的控制律应用于瞬间单独移动/路径,以控制瞬间单独移动路径。
40.这也允许实现高精度,特别是针对多个单独的底盘/移动系统也以合理性检查的方式实现。该控制概念还具有的优点是,整个反馈控制问题可以根据相对简单、紧凑的单独反馈控制问题(特别是针对单独的驱动单元)推导得出。换言之:开环/闭环控制装置适于通过在考虑瞬间绝对速度的同时将至少一个控制律应用于相应的底盘的瞬间单独移动路径,来指定瞬间单独移动路径,特别是由于针对它或它们的前进速度,来仅控制每个履带的一个驱动单元(如果适用,则仅每个双履带的两个驱动单元)。
41.基于对单轴驱动装置的控制,这里可以对具有彼此独立安装的多个底盘的多轴驱动装置进行概括。
42.这里,误差应理解为例如移动特性或应力特性或载荷特性(力、力矩、振荡、机械应力)的偏差大于最大阈值。可以单独地预定阈值。这里,误差可以例如与位置、时间或其他变量相关。
43.可以单独实现的位置和速度传感器可以特别用于确定瞬间速度和移动路径。在这种情况下,相应的移动路径的曲率半径可以对应于单独参考点与瞬时转动中心之间的半径。
44.根据p.morin等的上述出版物的第34.4.3章(“路径跟踪与定向控制”)的控制律可以特别用作单轴底盘/移动系统的控制律;这里应特别参考相应出版物的第34.4.3章和其中所包含的公式(同时考虑到所作的概括,特别是系数k_i被限定为单独底盘的累积角偏差的函数)。
45.根据一个实施例,针对每个底盘/移动系统的至少一个设定点参数的单独偏差进行反向控制优先于对整个履带系统的至少一个绝对设定点参数的偏差进行反向控制。这特别地允许实现特别是反应性的、时间有效的类型的控制。
46.根据一个实施例,针对底盘系统和/或移动系统、特别是针对分别为履带底盘形式的底盘/移动系统的单独的驱动单元(特别是驱动轮)单独地进行控制。这也允许最小化本地载荷。每个底盘/移动系统可以例如最初定位为针对支撑上部结构最优的优先级。
47.根据一个实施例,相应的底盘/移动系统的移动路径和/或速度特别是仅参考每个驱动单元的单独控制参数
‘
角速度’/
‘
转速’,仅通过与另外的底盘/移动系统相协调地单独激活相应的底盘/移动系统的单独的驱动单元,来控制。
48.根据一个实施例,特别是至少针对每个驱动单元(特别是驱动轮)的相应控制参数
‘
瞬间角速度’/
‘
转速’,单独激活和彼此依赖地控制至少四个底盘/移动系统。
49.可选地,特别是至少针对每个驱动单元(特别是驱动轮)的单独控制参数
‘
瞬间角速度’/
‘
转速’,逐一地(一个参数的至少八个控制变量)或成对地(一个参数的至少四个控制变量)单独激活和彼此依赖地控制至少四个底盘/移动系统的至少八个驱动单元(特别是
驱动轮)。
50.可选地,特别是至少针对每个驱动单元(特别是驱动轮)的单独控制参数
‘
瞬间角速度’/
‘
转速’,逐一地(一个参数的至少十六个控制变量)或成对地(一个参数的至少八个控制变量)单独激活和彼此依赖地控制至少四个底盘/移动系统的至少十六个驱动单元(特别是驱动轮)。
51.根据一个实施例,仅将相应的底盘/移动系统的单独的驱动单元(特别是驱动轮)的角速度/转速作为控制参数进行控制,特别是彼此依赖地控制,特别是以用于控制瞬间前进方向和/或移动路径和/或速度(瞬间速度状态)。
52.根据一个实施例,为每个底盘/移动系统限定进行该控制所参考的单独参考点,特别是至少近似对应于相应的底盘/移动系统的竖直转动轴线的参考点。在这种情况下,也可以为移动传送桥系统限定绝对参考点、特别是参考桥的纵向和/或横向范围或者参考散布系统的纵向和/或横向范围的至少近似处于中间的布置中的参考点,参考该绝对参考点进行控制。可选地,还可以限定这样的参考点,该参考点布置在连接双履带的相对履带中的两个驱动单元的轴线上的至少近似中间位置。
53.根据一个实施例,参考单个公共设定点瞬时转动中心,对所有底盘/移动系统和整个履带系统进行控制。这也使得可以将单独反馈控制问题减少为整个系统的一个整个反馈控制问题。在这种情况下,所有底盘/移动系统可以被激活使得反向控制单独的瞬时转动中心与公共设定点瞬时转动中心的偏差,并且因此分别关于相同的单个瞬时转动中心来调节它们的移动路径。
54.在这种情况下,公共瞬时转动中心的姿态或设定点瞬时转动中心的位置可以可选地参考打滑期间发生的动力学在计算上被调适,特别地这是由于发生的瞬间瞬时转动中心的姿态可能偏离主要或仅仅基于滚动的运动学(非完整约束)确定的设定点瞬时转动中心的姿态。
55.根据一个实施例,在该控制中不考虑移动履带或传送桥系统的速度。独立于整个系统的绝对速度,可以在相应的时间点调节整个系统的意图的设定点速度/角速度。
56.在控制中,特别是在考虑相对于彼此的相对距离和/或相对角度的情况下,可以考虑桥和/或散布系统的定向,并且因此确保了相对于彼此移动的至少两个系统的控制的同步。这可以例如通过确定被反向控制的误差(稳定在零附近)来进行。例如,如果两个参考点的设定点距离是一米,但此时测量的实际距离是1.1米,则形成差值(设定点
‑
实际)给出(矢量值)误差,随后(在相应的时间点/瞬间)计算减小该差异(并且稳定在零附近)的速度状态。
57.控制可以依靠预定的特性化变量,特别是用于桥和/或用于散布系统和/或用于相应底盘/移动系统的至少一个几何特性。
58.根据一个实施例,控制涉及检测每个底盘/移动系统的单独的机械载荷(结构应力),特别是相对于相应底盘/移动系统沿切向和/或法线方向的载荷。这也允许在每种情况下就相应底盘/移动系统的局部“最小化结构载荷”的要求进行单独控制。在这种情况下,由单独的底盘/移动系统的移动引起的机械应力,特别是履带系统的机械应力,可以通过单独的驱动单元的前进速度的规定来检测和反向控制。
59.根据一个实施例,通过该方法可以激活和控制适于运输待传送的材料的移动传送
桥系统,该移动传送桥系统具有桥,桥具有沿着主延伸轴线的传送带,其中,为了在下垫面上移动,桥布置在能够分别围绕竖直轴线枢转的多个底盘系统上,该移动传送桥系统此外还具有散布系统,其中,待传送的材料能够通过散布系统在传送带上从桥运输到卸载装置上,其中,为了在下垫面上移动,散布系统通过为了在下垫面上移动而能够围绕竖直轴线枢转的至少一个移动系统与桥解耦,其中,散布系统包括至少两个承载系统,该至少两个承载系统分别具有至少一个移动系统以便在下垫面上移动散布系统,其中,每个承载系统布置在散布系统上使得至少两个移动系统侧向包围桥的主延伸轴线,或者其中,每个承载系统布置在散布系统上使得相应的承载系统的至少一个移动系统相对于桥的主延伸轴线布置在一侧上,其中,底盘和移动系统中的每一个被单独激活并且双双、单独地且彼此依赖地针对相应的底盘/移动系统的移动路径和/或瞬间定向和/或速度被控制。
60.根据一个实施例,在考虑特别是通过至少一个结构载荷传感器(例如上部结构上的应变测量传感器系统)所检测的力和/或力矩和/或应力的测量值时发生控制,使得结构或结构载荷的弹性能最小化。
61.根据一个实施例,该控制还参考单独底盘/移动系统的转动点(竖直转动轴线)之间的至少一个相对距离参数或者参考该距离的公差范围来执行,特别是作为合理性检查,特别是与来自力和/或力矩和/或应力测量的测量值一致。依赖于距离值的控制可以使得对应力和载荷状态的推导分析成为可能,特别是甚至在组件的尺寸非常大的情况下。
62.根据本发明,上述目的还特别地通过使用执行上述方法的开环/闭环控制装置来实现,其中,该开环/闭环控制装置设定为特别是分别依赖于其他底盘/移动系统,特别是针对相应的驱动单元的瞬间角速度/转速,通过单独激活和控制相应的底盘/移动系统的相应的驱动单元(特别是驱动轮),来单独控制每个底盘/移动系统。这产生了上述优点。
63.根据本发明,上述目的还特别地通过开环/闭环控制装置在先前提及的方法中的用途来实现,该开环/闭环控制装置用于执行如下方法:特别是在包括至少一个移动传送桥系统和与其解耦的至少一个散布系统的组合系统中,用于激活和控制传送桥的多个底盘/移动系统、特别是履带底盘和/或散布系统的多个底盘/移动系统、特别是履带底盘,特别是用于单独激活和控制至少三个或四个移动系统或者至少三个或四个底盘/移动系统、特别是传送桥的底盘/移动系统和散布系统的底盘/移动系统两者。这产生了上述优点。
64.根据本发明,上述目的还特别地通过开环/闭环控制装置在前述方法中的用途来实现,该开环/闭环控制装置用于执行如下方法:该方法用于激活和控制履带系统的底盘/移动系统的多个履带底盘,特别是用于单独激活和控制至少三个或四个底盘/移动系统,其中,该开环/闭环控制装置用于指定单独的履带底盘的单独转速和平移速度。这产生了上述优点。
65.根据本发明,上述目的还特别地通过一种计算机程序产品来实现,该计算机程序产品设定为当在计算机上执行上述方法时执行上述方法。
66.根据本发明,上述目的还特别地通过一种计算机程序产品来实现,该计算机程序产品设定用于控制如下方法:该方法特别是在包括至少一个移动传送桥系统和与其解耦的至少一个散布系统的组合系统中,用于激活和控制传送桥的、特别是包括履带底盘的多个底盘/移动系统和/或散布系统的、特别是包括履带底盘的多个底盘/移动系统,特别是用于单独激活和控制至少三个或四个底盘/移动系统、特别是传送桥的底盘/移动系统和散布系
统的底盘/移动系统两者,其中,当该方法在计算机上执行时,该计算机程序产品适于单独激活相应的底盘/移动系统的相应的驱动单元,并且还适于依赖于参考时变参考配置的移动路径的指定(第一反馈控制问题)和/或依赖于参考传送桥或散布系统的设定点移动路径的移动路径的指定(第二反馈控制问题),来控制相应的驱动单元的前进速度。这在每种情况下都产生了上述优点。
67.根据本发明,上述目的还特别地通过一种计算机程序产品来实现,该计算机程序产品适于控制如下方法:该方法在前述方法中用于激活和控制履带系统的底盘/移动系统的多个履带底盘、特别是用于单独激活和控制至少三个或四个底盘/移动系统,其中,当在计算机上执行该方法时,单独的履带底盘的单独转动设定点速度和平移设定点速度被指定用于控制。这产生了上述优点。
附图说明
68.根据参考附图对至少一个示例性实施例的描述并且根据附图本身,本发明的其他特征和优点是显而易见的,其中,
69.图1a、图1b分别以侧视视角的示意图示出根据一个示例性实施例或根据一个应用的移动履带系统;
70.图2以侧视视角的示意图示出根据一个示例性实施例或根据另一应用的移动传送桥系统;
71.图3、图4、图5分别以平面图示出根据一个示例性实施例的、在对履带或传送桥系统进行控制期间单独底盘的单独移动状态和相对布置;
72.图6以立体侧视视角的示意图示出根据一个示例性实施例的具有四个底盘的系统,这些底盘分别在针对所施加的力效应的参考点处被测量和控制。
73.对于未针对单个附图明确描述的附图标记,参考其他附图。
74.为了更容易理解,参考所有附图标记一起部分地描述附图。在各个附图中示出的细节或特殊特征被单独地描述。
具体实施方式
75.图1a、图1b示出了具有上部结构5的移动履带系统10,上部结构5安装在四个底盘/移动系统4、11上,四个底盘/移动系统4、11分别具有履带底盘15,履带底盘15具有两个履带(双履带底盘)。每个履带由多个驱动单元14驱动,这里分别示出了两个驱动轮,然而也可以设置多于两个驱动轮。每个底盘/移动系统4、11能够围绕至少近似竖直定向的枢转轴线z1枢转。枢转轴线z1特别地相对于整个系统10的行进方向正交地定向。
76.图2示出了用于运输待传送的材料的移动传送桥系统1,该系统包括带有传送带的桥。桥2具有设计为双履带底盘的多个底盘系统4,以用于在下垫面6上移动。双履带底盘在每一侧上具有至少两个驱动单元14(特别是驱动轮)。
77.待传送的材料(未示出)可以在传送带3上由散布系统7从桥2运输到卸料装置8上。传送带3在传送辊上被引导。为了在下垫面6上移动,在本示例性实施例中,散布系统7具有四个移动系统11,其被设计为双履带底盘。例如,双履带底盘以四点支撑布置方式被支撑。
78.双履带底盘具有的优点是,其能够分别围绕相对于下垫面6竖直的轴线枢转,由此
最终增大了散布系统7的移动性。在本示例性实施例中,双履带底盘分别设计成没有转向履带或任何其他转向装置。换言之:双履带底盘通过相应的侧部或相应的履带上的推进力的差异来对自身进行定向。双履带底盘在每一侧上具有至少两个驱动单元14(特别是驱动轮)。这些可以逐一地、单独地或成对地被单独激活/控制。
79.在移动系统的这种设计的情况下,散布系统7基本静态地与桥2解耦/能够与桥2解耦。这里基本意味着至少经由传送带3在散布系统7与桥2之间确实存在物理连接。此外,线缆可以在散布系统7与桥2之间延伸。然而,散布系统7的净重载荷向桥2的转移不会进行。优选地,散布系统7的至少90%的重量载荷经由双履带底盘直接支承在下垫面6上。散布系统7仅通过双履带底盘机械地支承在下垫面6上。
80.散布系统7包括例如两个承载系统9。承载系统9例如以u形方式形成,分别具有水平杆和两个竖直支撑件92。承载系统9可以形成为门的形式。
81.承载系统9例如可以分别具有形成为双履带底盘的两个移动系统11,以便使散布系统7在下垫面6上移动。
82.例如,每个承载系统9布置在移动传送桥系统1上使得承载系统9的两个双履带底盘分别侧向地包围桥2的主延伸轴线。可选地,每个承载系统9布置在移动传送桥系统1上使得相应的移动系统11布置在桥2的主延伸轴线旁边的一侧上。承载系统9的高度能够通过提升器件(例如补偿缸)来调节。调平缸可以布置在桥2与底盘系统4之间,以便例如补偿下垫面6的梯度。传送带3通过布置在散布系统7上的传送带接收器12而从桥2引导到散布系统7。传送带接收器12具有例如提升器件和/或枢转器件。散布系统7特别地形成为翻斗车。
83.桥2的底盘系统4形成为双履带底盘,这里,其相对于散布系统7的形成为双履带底盘的移动系统以直角枢转地布置。这种相对布置是可变的。
84.开环/闭环控制装置20与相应的驱动单元14连接,并且适于特别是依赖于或者根据至少一个测量值,来单独激活和控制相应的驱动单元,该至少一个测量值单独地或者参考整个系统或相对地参考另一整个系统被检测。
85.整个系统1、10可以分别具有测量传感器系统30,其可以包括适于应用的传感器,特别是力传感器31、速度传感器(绝对速度)32、角速度传感器(单独速度)33、方向传感器34。传感器的数量和布置可以根据应用而个性化。
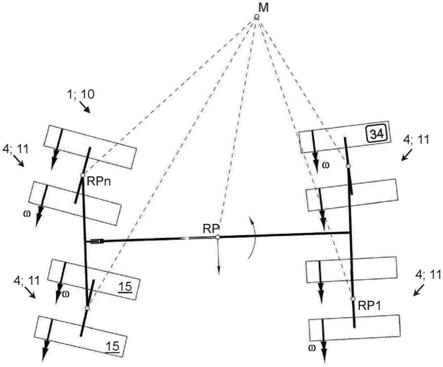
86.图3示出了系统1;10,其由四个底盘4;11;15组成,并且围绕瞬时转动中心m移动。为整个系统限定参考点rp,特别是以中间布置,并且为每个底盘4;11限定单独的参考点rp1、rpn,特别是在相应的底盘的竖直枢转轴线上的位置。在绝对参考点rp处指示的矢量识别所施加的力效应和/或移动状态。
87.图3还示出底盘的单独(推进)速度与定向之间的关系,特别地这是由于所有底盘都设计为没有转向履带或任何其他几何转向系统(特别是驱动转向或基于车轮的转向)。针对每个履带15示出了单个转速矢量ω,以便示出每个履带的单个单独的速度参数对于控制可以是足够的。
88.通常,针对本发明的控制概念,可以说明如下:一方面底盘或履带的单独定向和另一方面整个系统的移动的实现不必顺序地进行,而是可以连续并行地实现控制过程。换言之:可以同时控制单独底盘的定向和更高级别的整个系统的移动两者。
89.在图4中,整个系统的移动路径的半径比图3中的小得多。这可以例如通过前对履
带的另一外侧履带15(在行进方向上在左侧)比另一内侧履带施加更大的前进来实现(在后对履带的情况下,它们被相反地控制)。
90.在图5中,示出了设定点
‑
实际比较。四个底盘和其单独参考点rpn分别在瞬间单独移动路径c0n(虚线)上移动,但是意图在相应的单独设定点移动路径(虚线)cn上移动。对整个系统的参考可以相应地进行,其中,特别是可以在两个不同的设定点移动路径之间进行区分:
91.‑
设定点移动路径c0是在不考虑机械应力的情况下确定的设定点路径;
92.‑
设定点移动路径c是为了降低机械应力而“校正”的设定点路径,也就是说,在控制方面优化的移动路径。
93.相应的移动路径例如由瞬时转动中心m与参考点rp、rpn之间的相应半径r0n、rn、r0、r来限定。
94.在图6中,分别参考单独参考点中的一个示出在相应的空间方向上的单独力矢量f1、f2、f3。如先前所提及的,应力状态可以由测量传感器系统30、31、34检测并且在控制中被考虑在内。
95.附图标记表
[0096]1ꢀꢀꢀ
移动传送桥系统
[0097]2ꢀꢀꢀ
桥
[0098]3ꢀꢀꢀ
传送带
[0099]4ꢀꢀꢀ
底盘系统
[0100]5ꢀꢀꢀ
上部结构
[0101]6ꢀꢀꢀ
下垫面
[0102]7ꢀꢀꢀ
散布系统
[0103]8ꢀꢀꢀ
卸载装置
[0104]9ꢀꢀꢀ
承载系统
[0105]
92
ꢀꢀ
竖直支撑件
[0106]
10
ꢀꢀ
移动履带系统
[0107]
11
ꢀꢀ
移动系统
[0108]
12
ꢀꢀ
传送带接收器
[0109]
14
ꢀꢀ
驱动单元
[0110]
15
ꢀꢀ
履带底盘
[0111]
20
ꢀꢀ
开环/闭环控制装置
[0112]
30
ꢀꢀ
测量传感器系统
[0113]
31
ꢀꢀ
力传感器
[0114]
32
ꢀꢀ
速度传感器(绝对速度)
[0115]
33
ꢀꢀ
角速度传感器(单独速度)
[0116]
34
ꢀꢀ
方向传感器
[0117]
c0ꢀꢀꢀ
整个系统的瞬间移动路径
[0118]
c
ꢀꢀꢀ
整个系统的设定点移动路径
[0119]
c0n
ꢀꢀ
单独瞬间移动路径
[0120]
cn
ꢀꢀ
单独设定点移动路径
[0121]
f1
ꢀꢀ
第一空间方向上的力矢量
[0122]
f2
ꢀꢀ
第二空间方向上的力矢量
[0123]
f3
ꢀꢀ
第三空间方向上的力矢量
[0124]
m
ꢀꢀꢀ
瞬时转动中心
[0125]
r0n
ꢀꢀ
瞬间单独半径
[0126]
rn
ꢀꢀꢀ
单独设定点半径
[0127]
r0ꢀꢀꢀ
整个系统的瞬间半径
[0128]
r
ꢀꢀꢀꢀ
整个系统的设定点半径
[0129]
rp
ꢀꢀꢀ
整个系统的参考点
[0130]
rp1
ꢀꢀ
第一单独参考点
[0131]
rpn
ꢀꢀ
另外的单独参考点
[0132]
ω
ꢀꢀꢀ
单独角速度矢量(小欧米伽)
[0133]
z1
ꢀꢀꢀ
枢转轴线
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。