1.本公开总体上涉及轨道组件,包括可与座椅和/或交通工具结合使用的轨道组件。
2.背景
3.此背景描述在下面阐述仅仅是出于提供背景内容的目的。因此,此背景描述的任何方面,在其未被以其他方式证明是现有技术的程度上,既不明确地承认也不隐含地被承认是针对本公开的现有技术。
4.一些轨道组件可能没有被配置为在加载(loaded)条件下限制移动,可能是复杂的,和/或可能不是有效的。
5.因此,期望有这样的解决方案/选择,其使轨道组件的一个或更多个挑战或缺点最小化或者消除。前述讨论仅旨在说明本领域的示例并且不应被认为是对范围的否认。
6.概述
7.在实施例中,轨道组件可以包括轨道和支撑构件,该支撑构件连接到轨道并构造成沿着轨道移动。支撑构件可以包括接合部分。接合部分可被配置为在轨道组件的加载状态下接合轨道,以限制轨道和支撑构件之间的相对移动。接合部分可被配置为在轨道组件的非加载状态下不操作地接合轨道,也不限制轨道和支撑构件之间的移动。
8.就实施例而言,一种操作轨道组件的方法可以包括在轨道组件的非加载状态下经由连接到支撑构件的马达来控制支撑构件沿轨道的移动,和/或在加载状态下经由至少部分地接合轨道的接合部分来限制支撑构件相对于轨道的移动。
9.通过阅读下面的描述和查阅附图,本公开的实施例的前述和其他方面、特征、细节、效用和/或优点将是明显的。
附图说明
10.虽然权利要求不限于具体的说明,但是通过对各种示例的讨论可以获得对各种方面的理解。附图不一定按比例绘制,并且某些特征可能被放大或隐藏,以更好地说明和解释示例的创新方面。此外,这里描述的示例性图示并非穷举的或以其他方式限制,并且不限于附图中示出的或在以下详细描述中公开的精确形式和配置。通过参考如下附图详细描述了示例性图示:
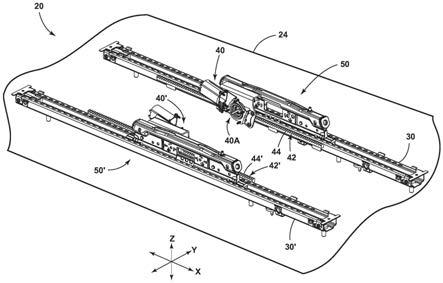
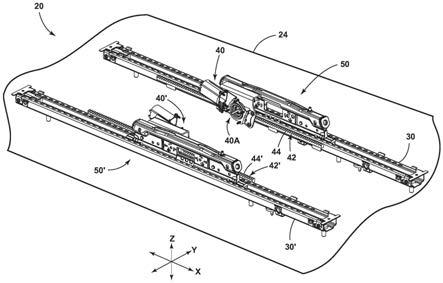
11.图1是大体上图示了根据本公开的教导的轨道组件的实施例的透视图。
12.图2是大体上图示了根据本公开的教导的轨道组件的实施例的俯视图。
13.图3是大体上图示了根据本公开的教导的在非加载状态下的轨道组件的实施例的一些部分的端视图。
14.图4是大体上图示了根据本公开的教导的轨道组件的实施例的一些部分的透视图。
15.图5是大体上图示了根据本公开的教导的在非加载状态下的轨道组件的实施例的一些部分的横截面视图。
16.图6a是大体上图示了根据本公开的教导的在非加载状态下的轨道组件的实施例
的一些部分的放大横截面视图。
17.图6b是大体上图示了根据本公开的教导的在加载状态下的轨道组件的实施例的一些部分的放大横截面视图。
18.图7是大体上图示了根据本公开的教导的在加载状态下的轨道组件的实施例的一些部分的透视图。
19.图8是大体上图示了根据本公开的教导的在加载状态下的轨道组件的实施例的一些部分的端视图。
20.图9是大体上图示了根据本公开的教导的操作轨道组件的方法的实施例的流程图。
21.详细描述
22.现在将详细参考本公开的实施例,其示例在本文中被描述且在附图中示出。虽然将结合实施例和/或示例来描述本公开,但是应理解,它们并不将本公开限制于这些实施例和/或示例。相反,本公开覆盖替代方案、修改和等同物。
23.在诸如图1和图2中大体上示出的实施例中,轨道组件20可以包括第一轨道30、第二轨道30’、第一马达40、第二马达40’、第一支撑构件50和/或第二支撑构件50’。第一支撑构件50和/或第一马达40可以被配置为相对于第一轨道30/沿着第一轨道30移动。第二支撑构件50’和/或第二马达40’可以被配置为相对于第二轨道30’/沿着第二轨道30’移动。第一支撑构件50和/或第二支撑构件50’可以连接到座椅22,使得第一马达40和/或第二马达40’可以沿着第一轨道30和/或第二轨道30’移动座椅22。第一支撑构件50可以经由座椅22和/或交通工具部件连接到第二支撑构件50’。第一支撑构件50可以被配置为与第二支撑构件50’一起移动。轨道组件20可以被配置为位于交通工具内,和/或可以例如被配置为限制交通工具碰撞的影响。
24.就实施例而言,例如图1和图2中大体上示出的实施例,第一轨道30和/或第二轨道30’可以连接到安装表面24(例如,交通工具地板)。第一轨道30可以大致平行于第二轨道30’设置,使得座椅22可以连接到第一轨道30和第二轨道30’两者。第一轨道30和/或第二轨道30’可以大致在x方向上延伸。第一轨道30可以被配置为至少部分地接收第一支撑构件50,和/或第二轨道30’可以被配置为至少部分地接收第二支撑构件50’。第一轨道30和/或第二轨道30’可以被配置为大致在x方向上接收第一支撑构件50和/或第二支撑构件50’。
25.在诸如图1-图2中大体上图示的实施例中,第一马达40可以连接到第一支撑构件50和/或第一轨道30。第二马达40’可以连接到第二支撑构件50’和/或第二轨道30’。马达40、40’可以大致位于轨道30、30’的内侧处或内侧上。例如但不限于,马达40、40’可以分别连接(例如固定地附接)到支撑构件50、50’的内侧。当马达40、40’被致动时,支撑构件50、50’和/或座椅22可以相对于第一轨道30和/或第二轨道30’一起移动(例如,在x方向上)。
26.就实施例而言,第一轨道30可以包括第一驱动部分42,且/或第二轨道30’可以包括第二驱动部分42’。第一驱动部分42和/或第二驱动部分42’可以分别连接到第一轨道30和/或第二轨道30’或从第一轨道30和/或第二轨道30’延伸。驱动部分42、42’可以例如连接到第一轨道30和/或第二轨道30’的内侧。第一驱动部分42和/或第二驱动部分42’可以大致在x方向上延伸(例如,大致平行于第一轨道30和/或第二轨道30’)。第一驱动部分42可以包括第一多个齿44,且/或第二驱动部分42’可以包括第二多个齿44’。例如但不限于,第一驱
动部分42和/或第二驱动部分42’被构造成齿条。第一马达40可以被配置为至少部分地接合第一驱动部分42的第一多个齿44,以沿着第一轨道30移动第一支撑构件50。例如但不限于,当第一马达40被致动时,第一马达40的输出部分40a(例如,输出轴、驱动轴、传动装置、变速装置等)可以旋转并接合第一驱动部分42的第一多个齿44,这可以使得支撑构件50沿着第一轨道30移动。第二马达40’的输出部分40a’可以被配置为至少部分地接合第二驱动部分42’的第二多个齿44’,以沿着第二轨道30’移动第二支撑构件50’,例如以与第一马达40的输出部分40a相同或相似的方式。例如但不限于,当第二马达40’被致动时,输出部分40a’可以旋转并接合第二驱动部分42’的第二多个齿44’,这可以使得支撑构件50’沿着第二轨道30’移动。第一驱动部分42和/或第二驱动部分42’可以构造成不相对于第一轨道30和/或第二轨道30’移动(例如,第一驱动部分42可以固定到第一轨道30,和/或第二驱动部分42’可以固定到第二轨道30’)。
27.就实施例而言,例如图3中大体上示出的,第一轨道30和/或第二轨道30’可以被配置为接收第一支撑构件50和/或第二支撑构件50’的至少一部分。轨道30、30’可以包括多种形状、尺寸和/或构型中的一种或更多种。例如但不限于,轨道30、30’可以大致是u形的。轨道30、30’可以包括基座部分32、第一侧部部分34a和/或第二侧部部分34b。第一轨道30可以以与第二轨道30’基本相似的方式构造。基座部分32可以连接到第一侧部部分34a和/或第二侧部部分34b,以形成为大体上u形的构型。侧部部分34a、34b可分别包括第一水平部分60a、60b、第二水平部分62a、62b、第一竖直部分64a、64b和/或第二竖直部分66a、66b。第一水平部分60a、60b可以连接到第一竖直部分64a、64b/从第一竖直部分64a、64b延伸,第一竖直部分64a、64b可以连接到第二水平部分62a、62b/从第二水平部分62a、62b延伸,和/或第二水平部分62a、62b可以连接到第二竖直部分66a、66b。第一水平部分60a、60b可以大致位于第二水平部分62a、62b下方(例如,在z方向上),和/或第一竖直部分64a、64b可以与第二竖直部分66a、66b偏离开(例如,在y方向上)。第一竖直部分64a、64b、第二竖直部分66a、66b、第一水平部分60a、60b、和/或第二水平部分62a、62b可以限定凹部/通道68a、68b,该凹部/通道68a、68b可以被配置为至少部分地接收第一支撑构件50。凹部/通道68a、68b可以例如但不限于包括大体上矩形的构型,该构型可以包括大体上向内开放的开口,以便接收支撑构件50。
28.在实施例中,诸如在图3中大体上示出的,第一支撑构件50可以包括第一接合部分52a和/或第二接合部分52b。第一接合部分52a可以被配置为大致紧邻第一侧部部分34a(例如,在y方向和/或z方向上),和/或第二接合部分52b可以被配置为大致紧邻第二侧部部分34b(例如,在y方向和/或z方向上)。接合部分52a、52b可以分别包括第一竖直部分54a、54b、水平部分56a、56b和/或第二竖直部分58a、58b。第一竖直部分54a、54b可以连接到水平部分56a、56b/从水平部分56a、56b延伸,和/或水平部分56a、56b可以连接到第二竖直部分58a、58b/从第二竖直部分58a、58b延伸,例如呈向上开放的大体上u形构型和/或可大体上与凹部/通道68a、68b的形状互补的构型。水平部分56a、56b可以大致在y方向上从第一竖直部分54a、54b延伸,和/或第二竖直部分58a、58b可以大致在z方向上从水平部分56a、56b延伸。
29.虽然部分可能被描述为竖直部分或水平部分,但是术语竖直和水平是为了说明的目的而提供的,但并不限制这些部分的构型。例如但不限于,竖直部分可以不是完全竖直的,和/或水平部分可以不是完全水平的。
30.就实施例而言,诸如在图3中大体上示出的,支撑构件50、50’可以包括一个或更多个滚动构件70a、70b、70c、70d,该一个或更多个滚动构件可以连接到第二竖直部分58a、58b。一个或更多个滚动构件70a、70b、70c、70d可以被配置为便于第一支撑构件50沿着第一轨道30移动(例如,滑动、滚动等)。例如但不限于,当马达40旋转并接合多个齿44时,滚动构件70a、70b、70c、70b可以沿着第一水平部分60a、60b滚动,使得第一支撑构件50可以沿着第一轨道30(例如,在x方向上)滚动。第一支撑构件50可构造成包括第一滚动构件70a、第二滚动构件70b、第三滚动构件70c、和/或第四滚动构件70d。第一支撑构件50可以被配置为基本上类似于第二支撑构件50’。
31.在实施例中,滚动构件70a、70b、70c、70d可以在第一轨道30的第一水平部分60a、60b和第二水平部分62a、62b之间大致竖直地(例如,在z方向上)设置。滚动构件70a、70b、70c、70d可以被定位成水平地(例如,在y方向上)位于第一轨道30的第一竖直部分64a、64b和第二竖直部分66a、66b之间。接合部分52a、52b的第二竖直部分58a、58b和/或滚动构件70a、70b、70c、70d可以被配置为至少部分地位于凹部/通道68a、68b中。滚动构件70a、70b、70c、70d可以被配置为接触第一轨道30的侧部部分34a、34b的第一水平部分60a、60b/沿着第一轨道30的侧部部分34a、34b的第一水平部分60a、60b滚动(例如,当支撑构件50、50’沿着轨道30、30’移动时)。滚动构件70a、70b、70c、70d可以至少部分地水平地(例如,在y方向上)位于接合部分52a、52b的第二竖直部分58a、58b和第一轨道30的第一竖直部分64a、64b之间。滚动构件70a、70b、70c、70d可以包括多种材料中的一种或更多种,例如但不限于塑料、聚合物和/或金属。
32.在实施例中,例如在图4和图5中大体上示出的,轨道30的侧部部分34a、34b的第二水平部分62a、62b可以包括多个孔/凹部80a、80b。例如,第一侧部部分34a的第二水平部分62a可以包括第一多个孔80a,和/或第二侧部部分34b的第二水平部分62b可以包括第二多个孔80b。多个孔80a、80b可以沿着第一轨道30的长度大致在x方向上延伸(例如,可以大致沿着第一轨道30的长度延伸,和/或可以沿着第一轨道30的长度的一部分延伸)。多个孔80a、80b可以包括多种形状、尺寸和/或构型中的一种或更多种。例如,孔80a、80b可以大致为矩形。多个孔80a、80b可以被配置为竖直地(例如,在z方向上)接收第一支撑构件50的至少一部分。
33.就实施例来说,诸如在图4和图5中大体上示出的,第一支撑构件50的接合部分52a、52b可以包括第一多个齿82a和/或第二多个齿82b。第一多个齿82a可以大致在z方向上从第一支撑构件50的第二竖直部分58a延伸,和/或第二多个齿82b可以大致在z方向上从第一支撑构件50的第二竖直部分58b延伸。第一多个齿82a和/或第二多个齿82b可以包括一种或更多种形状、尺寸和/或构型。例如但不限于,一个或更多个齿82a、82b可以大致是斜坡形、矩形、梯形和/或多边形。齿82a、82b可以包括第一表面84和/或第二表面86。第一表面84可以是大致竖直的(例如,平行于z方向),和/或第二表面86可以是大致成斜坡的(例如,在x-z平面中倾斜)。齿82a、82b可以沿着第二竖直部分58a、58b在大致第一支撑构件50的长度上延伸,和/或在第一支撑构件50的一部分长度上延伸。第一多个齿82a和/或第二多个齿82b可以例如但不限于大致垂直于y方向。
34.在实施例中,例如在图5和图6a中大体上示出的,轨道组件20可以包括非加载位置/状态,该非加载位置/状态可能对应于非碰撞状态和/或施加到轨道组件20的力/加载可
能处于或低于阈值的状态。当轨道组件20处于非加载状态时,多个齿82a、82b和/或多个孔80a、80b可以被配置为不实质地/操作地限制第一支撑构件50相对于第一轨道30的移动。例如但不限于,在座椅22处于非加载状态的使用和/或操作过程中,齿82a、82b可以不操作地接合孔80a、80b,和/或第一马达40可以被配置为控制第一支撑构件50沿着第一轨道30的移动(例如,参见图1和图2)。
35.就实施例而言,第一马达40可以被配置为对第一支撑构件50限制移动达到上至约20kn的力(例如,可提供约20kn的保持力)。当轨道组件20处于非加载状态时,齿82a、82b的上表面/部分88可以设置在第一支撑构件50的水平部分62a、62b的下方(例如,在z方向上)。例如但不限于,当轨道组件20处于非加载状态时,齿82a、82b可位于离第二水平部分62a、62b第一距离d1处(例如,在z方向上),如图5和图6a中大体上所示。第一距离d1可以例如但不限于大约1.0mm或更大或更小,例如大约0.9mm或更小。第一距离d1可以足够大以补偿轨道组件20的制造上的偏差,同时在非加载状态下保持齿82a、82b和孔80a、80b之间的间隔(例如,在z方向上)。在实施例中,水平部分56a、56b在非加载状态下可以与第二竖直部分66a、66b的底部间隔开距离d2,该距离可以大于距离d1,使得齿82a、82b可以在水平部分56a、56b接触竖直部分66a、66b的底部之前至少部分地移动到孔80a、80b中(例如,参见图3)。在非加载状态下,距离d2可以例如但不限于是约2.5mm,例如约2.6mm,或更多或更少。
36.就实施例而言,例如图6b、图7和图8中大体上示出的实施例,轨道组件20可以包括加载位置/状态,加载位置/状态可能对应于碰撞事件(例如,交通工具碰撞)或其他超过阈值的力被施加到轨道组件20的加载事件(例如,快速加速/减速)。作为这种加载事件的结果,轨道组件20可以从非加载状态转换到加载状态。例如但不限于,大体上如图5所示,在前端碰撞或明显减速的情况下,座椅22的乘坐人可能在大体上向前和向上的方向上被推压/受力(参见例如力f1),和/或在后端碰撞或明显加速的情况下,乘坐人可能在大体上向上和/或向后的方向上被推压/受力(参见例如力f2)。
37.在实施例中,如大体上在图5中所示的,座椅安全带/约束装置90可以至少间接地(例如,经由座椅框架22a)连接/锚定到支撑构件50、50’,使得与乘坐人相关联的力(例如,在加载事件中)可以至少部分地通过座椅安全带90传递到支撑构件50。例如,传递到支撑构件50的例如,由座椅安全带90从乘坐人传递的)向上/z方向的力(可使得支撑构件50相对于轨道30向上移动,这可使得支撑构件50的齿82a、82b沿向上方向移动而与轨道30的孔80a、80b接合。在加载事件期间,轨道30和/或孔80a、80b可以相对于交通工具和/或安装表面24保持在基本固定的位置。
38.在实施例中,当轨道组件20处于加载状态时,齿82a、82b的第一表面84可以至少部分地位于孔80a、80b中和/或与孔80a、80b接合(例如,第一表面84可以与孔80a、80b的内表面接触)。多个齿82a、82b和多个孔80a、80b之间的接触/接合可以限制座椅22和/或支撑构件50、50’在至少一个方向上的移动。例如但不限于,第一多个齿82a和第一多个孔80a之间的接触/接合,和/或第二多个齿82b和第二多个孔80b之间的接触/接合可以限制在纵向(例如,在x方向上向前和/或向后)和/或向上方向(例如,z方向)上的移动。齿82a、82b和孔80a、80b之间的这种接触/接合可以用比马达40更大的力来限制轨道30和支撑构件50之间的相对移动。例如但不限于,齿82a、82b和孔80a、80b之间的接触/接合可提供至少约35kn的保持力,该保持力可比马达40的保持力大至少50%(例如,马达40的保持力可为约20kn)。一个或
更多个齿82a、82b可以被配置为与多个孔80a、80b接合,以吸收和/或处理由加载/碰撞事件产生的大部分的力,使得马达40、40’可以不承担在加载/碰撞事件中限制支撑构件50、50’的显著移动的责任。
39.在实施例中,当轨道组件20处于加载状态时,多个齿82a、82b的至少一部分可以位于第二水平部分62a、62b中或上方(例如,在z方向上),例如在上方达到距离d3,该距离可以例如但不限于大约1.5mm或更大或更小(例如,参见图6b)。在碰撞/加载事件结束后,轨道组件20可以从加载状态转换到非加载状态。随着轨道组件20过渡到非加载状态,多个齿82a、82b的第二表面86可以有助于移动到非加载状态。例如但不限于,多个齿82a、82b的第二表面86的斜坡形状可以有助于第一支撑构件50向下(例如,z方向)移动到非加载状态/位置。齿82a、82b可以被配置为接合孔80a、80b,以限制在向前方向和/或向后方向上的移动。
40.就实施例而言,诸如在图9中大体上示出的,操作轨道组件20的方法100可包括提供第一轨道30和/或第一支撑构件50(步骤102)。支撑构件50可以包括接合部分52a、52b,接合部分52a、52b可被配置为接合轨道30的至少一部分。方法100可包括经由马达40(马达40可连接到第一支撑构件50)控制第一支撑构件50沿着轨道30的移动(例如,在x方向上向前/向后)(步骤104)。方法100可包括在加载状态(例如,碰撞事件)下经由接合部分52a、52b(该接合部分52a、52b至少部分地接合第一轨道30)限制第一支撑构件50相对于轨道30的移动(步骤106)。接合部分52a、52b可以包括第一多个齿82a和/或第二多个齿82b,该第一多个齿82a和/或第二多个齿82b可以大致在竖直方向上延伸,和/或可以在加载状态下分别被定位成至少部分地位于第一轨道30的第一多个孔80a和/或第二多个孔80b中。限制第一支撑构件50的移动可以包括一个或更多个齿82a、82b(例如,齿82a、82b的第一表面84)接合一个或更多个孔80a、80b。第一多个齿82a和/或第二多个齿84a可以大致是斜坡形的。例如,在加载状态下(例如,当限制支撑构件50的移动时),第一多个齿82a和/或第二多个齿82b中的一个或更多个可以被定位成至少部分地位于第一多个孔80a和/或第二多个孔80b上方(例如,延伸超过)例如大约1.5mm。第一多个齿82a可以被配置为在非加载状态下位于第一多个孔80a下方大约0.9mm,例如但不限于此。方法100可包括在非加载状态下接合部分52a、52b不会实质地限制第一支撑构件50相对于第一轨道30的移动。
41.在实施例中,马达40可被配置为针对支撑构件50相对于轨道30的非预期移动的限制提供上至第一力阈值的限制,例如在轨道组件20的非加载状态下。例如但不限于,第一阈值可以是大约20kn。支撑构件50的接合部分52a、52b和轨道之间的接合可被配置为针对支撑构件的非预期移动的限制提供上至第二阈值力的限制,该第二阈值力可大于第一阈值力,例如在加载状态(例如,碰撞状态)下。例如但不限于,第二阈值力可以是大约35kn。
42.本技术还涉及:
43.1)一种轨道组件,包括:
44.轨道;
45.支撑构件,其连接到所述轨道并配置为沿着所述轨道移动;
46.其中所述支撑构件包括接合部分;
47.所述接合部分被配置为在所述轨道组件的加载状态下接合所述轨道,以限制所述轨道和所述支撑构件之间的相对移动;且
48.所述接合部分被配置为在所述轨道组件的非加载状态下不操作地接合所述轨道,
也不限制所述轨道和所述支撑构件之间的移动。
49.2)根据1)所述的轨道组件,其中,所述接合部分包括竖直向上延伸的一个或更多个齿;且
50.所述一个或更多个齿被配置为在所述加载状态下接合所述轨道。
51.3)根据2)所述的轨道组件,其中所述一个或更多个齿和所述轨道之间的接合被配置为提供至少约35kn的保持力。
52.4)根据2)所述的轨道组件,其中,所述一个或更多个齿为大致斜坡形的。
53.5)根据2)所述的轨道组件,其中,所述轨道包括水平部分;且
54.所述水平部分包括一个或更多个孔,所述一个或更多个孔被配置为至少部分地接收所述接合部分的所述一个或更多个齿。
55.6)根据5)所述的轨道组件,其中当所述轨道组件处于所述加载状态时,所述一个或更多个齿至少部分地位于所述一个或更多个孔内。
56.7)根据6)所述的轨道组件,其中,在所述加载状态下,所述一个或更多个齿中的至少一个至少部分地延伸到所述轨道的所述水平部分的上方。
57.8)根据5)所述的轨道组件,其中,当所述轨道组件处于所述非加载状态时,所述一个或更多个齿不是位于所述一个或更多个孔中,而是位于所述轨道的所述水平部分下方。
58.9)根据1)所述的轨道组件,其中,所述支撑构件包括以大致u形构型设置的两个竖直部分和一个水平部分;且
59.所述轨道包括两个竖直轨道部分和两个水平部分,所述轨道的所述两个竖直轨道部分和两个水平部分至少部分地限定了通道,所述通道被配置为至少部分地接收所述支撑构件的两个竖直部分中的一个。
60.10)根据9)所述的轨道组件,其中,所述支撑构件包括至少一个滚动构件,所述至少一个滚动构件被配置为便于所述支撑构件沿着所述轨道移动;且
61.所述至少一个滚动构件至少部分地位于所述通道中。
62.11)根据10)所述的轨道组件,其中所述轨道的所述两个水平部分包括第一水平部分和第二水平部分;
63.所述轨道的所述第二水平部分大致位于所述轨道的所述第一水平部分的下方;且
64.所述至少一个滚动构件与所述轨道的所述第二水平部分接触并被配置为沿着所述轨道的所述第二水平部分滚动,以便于所述支撑构件沿着所述轨道移动。
65.12)根据1)所述的轨道组件,其中,所述支撑构件包括马达;
66.所述轨道包括驱动部分;
67.所述马达的输出部分与所述驱动部分接合;且
68.在所述非加载状态下启动所述马达使得经由所述驱动部分使所述支撑构件沿着所述轨道移动。
69.13)根据12)所述的轨道组件,其中,所述输出部分和所述驱动部分之间的接合被配置为提供第一保持力;且
70.所述接合部分和所述轨道之间的接合被配置为提供大于所述第一保持力的第二保持力。
71.14)根据13)所述的轨道组件,其中,所述第一保持力约为20kn,而所述第二保持力
约为35kn。
72.15)根据12)所述的轨道组件,其中,所述马达和所述驱动部分大致位于所述轨道的侧部。
73.16)一种操作轨道组件的方法,所述轨道组件包括轨道和具有接合部分的支撑构件,所述方法包括:
74.在所述轨道组件的非加载状态下,经由连接到所述支撑构件的马达控制所述支撑构件沿所述轨道的移动;和
75.在加载状态下,经由所述接合部分至少部分地接合所述轨道限制所述支撑构件相对于所述轨道的移动。
76.17)根据16)所述的方法,包括在所述非加载状态下不经由所述接合部分限制所述支撑构件相对于所述轨道的移动。
77.18)根据16)所述的方法,其中,所述接合部分包括沿竖直方向延伸的多个齿;且
78.其中在所述加载状态下限制所述支撑构件相对于所述轨道的移动包括所述多个齿接合所述轨道的多个孔。
79.19)根据18)所述的方法,其中,在所述加载状态下限制所述支撑构件相对于所述轨道的移动的过程中,所述多个齿中的至少一个在所述多个孔的相应孔上方延伸至少约1mm;和
80.在经由马达控制所述支撑构件沿所述轨道的移动的过程中,所述多个齿中的至少一个位于所述相应孔下方至少约0.9mm处。
81.20)根据18)所述的方法,其中所述多个齿包括斜坡构型。
82.本文描述了用于各种装置、系统和/或方法的各种示例/实施例。阐述了很多具体细节,以提供对于在说明书中描述的以及在附图中示出的示例/实施例的总体结构、功能、制造以及使用的透彻理解。然而,本领域技术人员将理解的是,这些示例/实施例可以在没有这些具体细节的情况下进行实践。在其他情况中,众所周知的操作、部件以及元件并未被详细描述,以免混淆说明书中所描述的示例/实施例。本领域普通技术人员将理解,本文中描述的以及示出的示例/实施例是非限制性的示例,且因此可认识到的是,本文中所公开的具体结构和功能细节可以是代表性的且不一定限制实施例的范围。
83.在整篇说明书中提到的“示例”“在示例中”“就示例而言”“各个实施例”、“就实施例而言”、“在实施例中”或“实施例”等意指结合示例/实施例描述的特定特征、结构、或特性被包括在至少一个示例/实施例中。因此,在整个说明书中在各处出现的短语“示例”“在示例中”“就示例而言”“在各个实施例中”、“就实施例而言”、“在实施例中”或“实施例”等不一定都指相同的实施例。此外,特定特征、结构、或特性可以以任何适当的方式在一个或更多个示例/实施例中组合。因此,结合一个实施例/示例示出或描述的特定特征、结构或特性可以不受限制地与一个或更多个其他实施例/示例的特征、结构、功能和/或特性整体地或部分地组合,只要这种组合不是不合逻辑的或无功能的。此外,可以进行许多修改以使特定情况或材料适应本公开的教导,而不脱离本公开的范围。
84.应当理解,提到单个元素不一定限于此,而是可以包括一个或更多个这样的元素。任何方向参考(例如,正(plus)、负(minus)、上部、下部、向上、向下、左、右、向左、向右、顶部、底部、上方、下方、竖直、水平、顺时针和逆时针)仅用于识别目的以帮助读者理解本公
开,并且不产生限制,特别是不产生关于示例/实施例的位置、定向或使用的限制。
85.所提到的连接相关词(例如,附接、联接、连接及类似词语)应被广义地解释,并且可包括元件的连接之间的中间构件以及元件之间的相对移动。因此,所提到的连接相关词并不一定意味着两个元件是直接连接/联接的并且彼此处于固定的关系。本说明书中的“例如(e.g.)”的使用应被广义地解释并且用于提供本公开的实施例的非限制性示例,并且本公开不限于这样的示例。“和”和“或”的使用应被广义地解释(例如,被视为“和/或”)。例如但不限于,“和”的使用并不一定需要所列出的所有元素或特征,且“或”的使用是包容性的,除非这种解释是不合逻辑的。
86.虽然本文可以结合特定顺序中的一个或更多个步骤来描述过程、系统和方法,但是应当理解,这些方法可以在步骤顺序不同、某些步骤同时执行、添加步骤、和/或省略某些所描述的步骤的情况下实践。
87.在以上描述中包含的或在附图中示出的所有内容应仅被解释为说明性的而非限制性的。可在细节或结构上做出改变而不偏离本公开。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。