1.本技术大体上涉及半导体制造领域,且更具体来说,涉及半导体处理系统及其中的基片传输模块。
背景技术:
2.半导体处理系统通常包括设备前端模块(efem)、装载锁模块(ll)、传输模块(tm)和处理模块(pm)等几部分。随着半导体制造技术的发展,需要提高半导体处理系统的产能,提高生产机台的集成生产能力,这就要求增加半导体处理系统能够同时处理的基片的最大数量。可以通过增加半导体处理系统搭载的处理腔室的数量来实现此目的。因此,如何改进半导体处理系统的可扩展性、有效地提高系统的集成度成为半导体处理系统设计中需要重点考量的问题。
技术实现要素:
3.为了解决上述问题,在本技术的一种实施方式中,提供了一种基片传输模块。所述基片传输模块包括传输腔室、滑轨以及机械臂。所述传输腔室在长度方向上具有第一端和第二端,在宽度方向上具有第一侧和第二侧。所述滑轨安置于所述传输腔室中,且沿所述传输腔室的长度方向延伸。所述机械臂安置于所述滑轨上且具有延伸的臂部。所述机械臂可操作以沿所述滑轨在所述传输腔室的长度方向上移动,以在设备前端模块与处理腔室之间传送基片,其中所述设备前端模块位于所述传输腔室的所述第一端,所述处理腔室位于所述传输腔室的所述第一侧或所述第二侧。
4.在一些实施例中,所述基片传输模块进一步包括滑动支架。所述滑动支架安置于所述滑轨上,且可操作以沿所述滑轨在所述传输腔室的长度方向上移动,其中所述机械臂安置于所述滑动支架上。
5.在一些实施例中,所述传输腔室的所述第一侧和所述第二侧上设置有多个阀门,所述机械臂的所述臂部的前端可操作以穿过所述多个阀门。
6.在一些实施例中,所述传输腔室包括真空传输腔。所述传输腔室可通过所述第一侧或所述第二侧上的阀门与所述处理腔室相连。所述机械臂可操作以通过所述阀门将待处理基片放置到所述处理腔室,以及通过所述阀门从所述处理腔室取出经处理基片。所述传输腔室可通过所述第一端上的真空阀门与位于所述传输腔室和所述设备前端模块之间的装载锁腔室相连。所述机械臂可操作以通过所述真空阀门从所述装载锁腔室取出待处理基片,以及通过所述真空阀门将经处理基片放置到所述装载锁腔室。
7.在一些实施例中,所述传输腔室包括大气传输腔。所述传输腔室与所述设备前端模块相连,所述机械臂可操作以从所述设备前端模块取出待处理基片,以及将经处理基片放置到所述设备前端模块。所述传输腔室可通过所述第一侧或所述第二侧上的大气阀门与位于所述传输腔室和所述处理腔室之间的装载锁腔室相连。所述机械臂可操作以通过所述大气阀门将待处理基片放置到所述装载锁腔室,以及通过所述大气阀门从所述装载锁腔室
取出经处理基片。
8.在本技术的另一种实施方式中,提供了一种半导体处理系统。所述半导体处理系统可包括本技术所公开的基片传输模块、设备前端模块以及处理腔室。
9.在一些实施例中,所述基片传输模块进一步包括滑动支架。所述滑动支架安置于所述滑轨上,且可操作以沿所述滑轨在所述传输腔室的长度方向上移动,其中所述机械臂安置于所述滑动支架上。
10.在一些实施例中,所述传输腔室的所述第一侧和所述第二侧上设置有多个阀门,所述机械臂的所述臂部的前端可操作以穿过所述多个阀门。
11.在一些实施例中,所述传输腔室包括真空传输腔。所述传输腔室可通过所述第一侧或所述第二侧上的阀门与所述处理腔室相连。所述机械臂可操作以通过所述阀门将待处理基片放置到所述处理腔室,以及通过所述阀门从所述处理腔室取出经处理基片。所述半导体处理系统进一步包括位于所述传输腔室和所述设备前端模块之间的装载锁腔室,其中所述传输腔室可通过所述第一端上的真空阀门与所述装载锁腔室相连,所述装载锁腔室可通过大气阀门与所述设备前端模块相连。所述机械臂可操作以通过所述真空阀门从所述装载锁腔室取出待处理基片,以及通过所述真空阀门将经处理基片放置到所述装载锁腔室。所述设备前端模块可包括第二机械臂,所述第二机械臂可操作以通过所述大气阀门将待处理基片放置到所述装载锁腔室,以及通过所述大气阀门从所述装载锁腔室取出经处理基片。所述设备前端模块可包括第二滑轨,所述第二机械臂安置于所述滑轨上且可操作以沿所述滑轨移动。
12.在一些实施例中,所述传输腔室包括大气传输腔。所述传输腔室与所述设备前端模块相连,所述机械臂可操作以从所述设备前端模块取出待处理基片,以及将经处理基片放置到所述设备前端模块。所述设备前端模块可包括第二机械臂,所述第二机械臂可操作以将待处理基片从基片载具传递到所述机械臂,以及将经处理基片从所述机械臂传递到所述基片载具。所述设备前端模块可包括第二滑轨,所述第二机械臂安置于所述滑轨上且可操作以沿所述滑轨移动。所述半导体处理系统进一步包括位于所述传输腔室和所述处理腔室之间的装载锁腔室,其中所述传输腔室通过所述第一侧或所述第二侧上的大气阀门与所述装载锁腔室相连,所述装载锁腔室通过真空阀门与所述处理腔室相连。所述机械臂可操作以通过所述大气阀门将待处理基片放置到所述装载锁腔室,以及通过所述大气阀门从所述装载锁腔室取出经处理基片。所述装载锁腔室包括额外机械臂,所述额外机械臂可操作以通过所述真空阀门将待处理基片放置到所述处理腔室,以及通过所述真空阀门从所述处理腔室取出经处理基片。
13.在一些实施例中,所述处理腔室包括偶数个处理站。
14.在以下附图及描述中阐述本技术的一或多个实例的细节。其他特征、目标及优势将根据所述描述及附图以及权利要求书而显而易见。
附图说明
15.本说明书中的公开内容提及且包含以下各图:
16.图1说明根据本技术的一些实施例的半导体处理系统的结构示意图;
17.图2说明根据本技术的另一些实施例的半导体处理系统的结构示意图。
18.根据惯例,图示中所说明的各种特征可能并非按比例绘制。因此,为了清晰起见,可任意扩大或减小各种特征的尺寸。图示中所说明的各部件的形状仅为示例性形状,并非限定部件的实际形状。另外,为了清楚起见,可简化图示中所说明的实施方案。因此,图示可能并未说明给定设备或装置的全部组件。最后,可贯穿说明书和图示使用相同参考标号来表示相同特征。
具体实施方式
19.以下将参考图式更完整说明本发明,并且藉由例示显示特定范例具体实施例。不过,本主张主题可具体实施于许多不同形式,因此所涵盖或申请主张主题的建构并不受限于本说明书所揭示的任何范例具体实施例;范例具体实施例仅为例示。同样,本发明在于提供合理宽阔的范畴给所申请或涵盖之主张主题。
20.本说明书内使用的词汇“在一实施例”或“根据一实施例”并不必要参照相同具体实施例,也不意味着请求保护的技术方案必须包含实施例所描述的所有特征,且本说明书内使用的“在其他(一些/某些)实施例”或“根据其他(一些/某些)实施例”并不必要参照不同的具体实施例。其目的在于例如主张的主题包括全部或部分范例具体实施例的组合。本说明书中的术语“包括”和“包含”是以开放式的方式使用的,因此应被解释为意指“包括,但不限于
……”
。本说明书所指“上”和“下”的意义并不限于图式所直接呈现的关系,其应包含具有明确对应关系的描述,例如“左”和“右”,或者是“上”和“下”的相反。本说明书中的词汇“基片”应理解为可与术语“基板”、“晶圆”、“晶元”、“晶片”、“硅片”等术语互换使用。本说明书使用某些术语来指称特定的系统部件,正如本领域技术人员将会理解的,不同的企业可能会用不同的名称来指称这些系统部件。
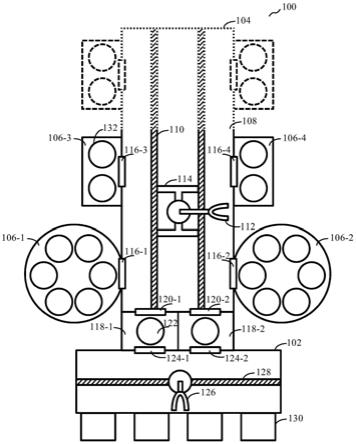
21.图1展示了根据本技术的一些实施例的半导体处理系统100的结构示意图。半导体处理系统100包括设备前端模块102、装载锁腔室118-1和118-2(统称为装载锁腔室118)、基片传输模块104以及处理腔室106-1、106-2、106-3和106-4(统称为处理腔室106)。尽管图1中示出了特定数量的装载锁腔室和处理腔室,本领域技术人员将会理解半导体处理系统100可包括更少或更多数量的装载锁腔室和处理腔室。
22.基片传输模块104包括传输腔室108、滑轨110和机械臂112。传输腔室108在长度方向(例如,图1所示的竖直方向)上具有第一端(例如,图1所示的下端)和第二端(例如,图1所示的上端),在宽度方向(例如,图1所示的水平方向)上具有第一侧(例如,图1所示的左侧)和第二侧(例如,图1所示的右侧)。传输腔室108长度方向上的尺寸一般大于宽度方向上的尺寸。图1中用虚线部分表示传输腔室108在长度方向上可视需要任意扩展。
23.滑轨110安置于传输腔室108中,且沿传输腔室108的长度方向延伸。图1中用虚线部分表示滑轨110在传输腔室108的长度方向上可视需要任意延伸。在图1的示例中,滑轨110包括两条彼此平行的轨道。相对于单条轨道,两条轨道可实现更高的稳定性。应理解,在其他实施例中,滑轨110可包括其他数量、其他形式的轨道。
24.机械臂112安置于滑轨110上,且可操作以沿滑轨110在传输腔室108的长度方向上移动,从而可以在位于传输腔室108的第一端处的设备前端模块102与位于传输腔室108的第一侧或第二侧处的处理腔室106之间传送基片。例如,通过沿滑轨110移动到不同的位置,机械臂112可以将基片从设备前端模块102传送到处理腔室106中的任一者,或将基片从处
理腔室106中的任一者传送到设备前端模块102,或将基片从处理腔室106中的一者传送到处理腔室106中的另一者。在本技术的一些实施例中,滑轨110上安置有滑动支架114,机械臂112则安置于滑动支架114上。滑动支架114可操作以沿滑轨110在传输腔室108的长度方向上移动,机械臂112可随着滑动支架114一起移动。在一些实施例中,机械臂112固定地安装在滑动支架114上,即机械臂112不能在滑动支架114上移动。在另一些实施例中,机械臂112可移动地安装在滑动支架114上,即机械臂112在滑动支架114上可进行小范围的移动。在本技术的其他实施例中,机械臂112可以不通过滑动支架114,而是以其他方式安置于滑轨110上并沿滑轨110移动。
25.机械臂112具有延伸的臂部,所述臂部的长度是可伸缩的(例如,所述臂部可包括可折叠或可伸缩的部分),因而所述臂部的前端可以伸到指定的位置(例如,装载锁腔室118或处理腔室106内)。所述臂部的前端可包括用于支撑或保持基片的装置,例如,叶片、桨叶、叉或夹具等。机械臂112可具有一个臂部,也可具有多个臂部以同时传递多个基片。在滑轨110较长、机械臂112可能需要沿滑轨110移动较长距离来传送基片的情形下,需要提高机械臂112传送的稳定性和设备可靠性,例如,可通过精心设计滑轨110和机械臂112的结构以及二者之间的连接结构、采用传感器、信号配合和腔内气流控制等手段来实现平稳的传送和准确的定位。
26.传输腔室108的两侧可设置多个阀门116-1、116-2、116-4和116-4(统称为阀门116)。尽管图1中示出了特定数量的阀门116,本领域技术人员将会理解半导体处理系统100可包括更少或更多数量的阀门116。传输腔室108通过阀门116与相应的处理腔室106相连。例如,传输腔室108通过阀门116-1与处理腔室106-1相连,传输腔室108通过阀门116-2与处理腔室106-2相连,传输腔室108通过阀门116-3与处理腔室106-3相连,传输腔室108通过阀门116-4与处理腔室106-4相连。尽管在图1的示例中每个处理腔室106仅有一个阀门116,应理解,在其他实施例中,处理腔室106可以有多于一个的阀门116。例如,传输腔室108可通过两个阀门与处理腔室106-3相连,其中每个阀门对准处理腔室106-3中的一个相应的处理站132。机械臂112的臂部的前端可操作以穿过阀门116进入相应的处理腔室106,从而将待处理基片放置到处理腔室106(例如,处理腔室中的处理站处)或者从处理腔室106(例如,处理腔室中的处理站处)取出经处理基片。
27.图1示出了包括6个处理站的处理腔室106-1和106-2,以及包括2个处理站的处理腔室106-3和106-4。图1中还用虚线部分表示传输腔室108在长度方向上扩展的部分的两侧上也可以布置任意数量的阀门以及相应的处理腔室。因此,通过增加传输腔室108以及相应的滑轨110的长度,半导体处理系统100可以增加所搭载的处理腔室的数量,从而提高系统集成度,增加产能。本领域技术人员将会理解半导体处理系统100可包括具有其他形状及配置的处理腔室,各处理腔室中也可包括其他不同数量的处理站。在一些实施例中,处理腔室中可包括偶数个处理站。传输腔室108两侧上的阀门及处理腔室的位置、数量、类型等可以相同,也可以不同。半导体处理系统100中的处理腔室可用以对基片执行各种半导体加工工艺,例如沉积、蚀刻、清洁等。各处理腔室执行的加工工艺可以相同,也可以不同。
28.图1所示的传输腔室108处于装载锁腔室118与处理腔室106之间,因此是真空传输腔,可使用真空泵使腔内处于真空环境。装载锁腔室118位于传输腔室108和设备前端模块102之间。在图1的示例中,装载锁腔室118-1和118-2是隔离开的两个腔室,两个腔室可各自
独立地抽气或进气。每一腔室可以接收一个基片。在其他实施例中,一个装载锁腔室可以接收多个基片。传输腔室108通过第一端上的真空阀门120-1与装载锁腔室118-1相连,传输腔室108通过第一端上的真空阀门120-2与装载锁腔室118-2相连。传输腔室108中的机械臂112的前端可操作以穿过真空阀门120进入相应的装载锁腔室118,从而从装载锁腔室118(例如,装载锁腔室中的平台122处)取出待处理基片或者将经处理基片放置到装载锁腔室118(例如,装载锁腔室中的平台122处)。在图1的示例中,由于传输腔室108的第一端与并排的两个装载锁腔室118相连,传输腔室108的宽度需要大于两片基片的直径加上一定的空隙宽度。例如,传输腔室108的宽度大约为75cm。
29.装载锁腔室118-1通过大气阀门124-1与设备前端模块102相连,装载锁腔室118-2通过大气阀门124-2与设备前端模块102相连。设备前端模块102可包括机械臂126。机械臂126可操作以在基片载具130与装载锁腔室118之间传递基片。机械臂126具有延伸的臂部,所述臂部的长度是可伸缩的(例如,所述臂部可包括可折叠或可伸缩的部分),因而所述臂部的前端可以伸到指定的位置(例如,装载锁腔室118或基片载具130内)。所述臂部的前端可包括用于支撑或保持基片的装置,例如,叶片、桨叶、叉或夹具等。机械臂126可具有一个臂部,也可具有多个臂部以同时传递多个基片。图1示出了位于设备前端模块102一端的4个基片载具130。应理解,基片载具130也可布置于设备前端模块102的其他位置(例如,两侧),也可包含更少或更多的基片载具130。机械臂126可操作以通过设备前端模块102与任一基片载具130之间的门(图中未示出)将待处理基片从基片载具130取出,再通过大气阀门124将待处理基片放置到装载锁腔室118。机械臂126还可操作以通过大气阀门124从装载锁腔室118取出经处理基片,再通过设备前端模块102与任一基片载具130之间的门(图中未示出)将经处理基片放置到基片载具130。
30.在一些实施例中,设备前端模块102可包括滑轨128。机械臂126可安置于滑轨128上,且可操作以沿滑轨128移动到不同位置传送基片。机械臂126也可通过支架(图中未示出)或其他连接结构安置于滑轨128上。在图1的示例中,滑轨128包括一条轨道。应理解,在其他实施例中,滑轨128可包括其他数量、其他形式的轨道。在本技术的其他实施例中,机械臂126可以不通过滑轨而通过其他方式移动,或者,机械臂126并不移动,而是仅通过延伸的臂部来传送基片。
31.下面结合图1来说明半导体处理系统100中基片的传输方式。当有基片需要处理时,待处理基片置于基片载具130中。装载锁腔室118相应的真空阀门120关闭,大气阀门124开启,装载锁腔室118恢复到大气环境。机械臂126从基片载具130取出待处理基片,通过大气阀门124传送到装载锁腔室118。然后,大气阀门124关闭,装载锁腔室118抽真空后,相应的真空阀门120开启。机械臂112移动到传输腔室108的第一端附近,通过真空阀门120从装载锁腔室118取出待处理基片,再沿滑轨110移动到进行所需处理的处理腔室106附近,通过相应的阀门116将待处理基片传送到处理腔室106中。阀门116关闭后,对基片进行所需处理。处理完成后,阀门116开启,机械臂112将经处理基片从处理腔室106取出。如果还需要其他处理腔室进行处理,机械臂112可将基片传送到其他处理腔室,否则,机械臂112移动到传输腔室108的第一端附近,通过真空阀门120将经处理基片传送到装载锁腔室118。然后,装载锁腔室118相应的真空阀门120关闭,大气阀门124开启,装载锁腔室118恢复到大气环境。机械臂126通过大气阀门124将经处理基片从装载锁腔室118取出,传送到基片载具130。
32.图2展示了根据本技术的另一些实施例的半导体处理系统200的结构示意图。半导体处理系统200包括设备前端模块202、基片传输模块204、装载锁腔室218-1、218-2、218-3和218-4(统称为装载锁腔室118)以及处理腔室206-1和206-2(统称为处理腔室206)。尽管图1中示出了特定数量的装载锁腔室和处理腔室,本领域技术人员将会理解半导体处理系统100可包括更少或更多数量的装载锁腔室和处理腔室。
33.基片传输模块204包括传输腔室208、滑轨210和机械臂212。传输腔室208在长度方向(例如,图2所示的竖直方向)上具有第一端(例如,图2所示的下端)和第二端(例如,图2所示的上端),在宽度方向(例如,图2所示的水平方向)上具有第一侧(例如,图2所示的左侧)和第二侧(例如,图2所示的右侧)。传输腔室208长度方向上的尺寸一般大于宽度方向上的尺寸。图2中用虚线部分表示传输腔室208在长度方向上可视需要任意扩展。
34.滑轨210安置于传输腔室208中,且沿传输腔室208的长度方向延伸。图2中用虚线部分表示滑轨210在传输腔室208的长度方向上可视需要任意延伸。在图2的示例中,滑轨210包括两条彼此平行的轨道。相对于单条轨道,两条轨道可实现更高的稳定性。应理解,在其他实施例中,滑轨210可包括其他数量、其他形式的轨道。
35.机械臂212安置于滑轨210上,且可操作以沿滑轨210在传输腔室208的长度方向上移动,从而可以在位于传输腔室208的第一端处的设备前端模块202与位于传输腔室208的第一侧或第二侧处的处理腔室206之间传送基片。例如,通过沿滑轨210移动到不同的位置,机械臂212可以将基片从设备前端模块202传送到处理腔室206中的任一者,或将基片从处理腔室206中的任一者传送到设备前端模块202,或将基片从处理腔室206中的一者传送到处理腔室206中的另一者。在本技术的一些实施例中,滑轨210上安置有滑动支架214,机械臂212则安置于滑动支架214上。滑动支架214可操作以沿滑轨210在传输腔室208的长度方向上移动,机械臂212可随着滑动支架214一起移动。在一些实施例中,机械臂212固定地安装在滑动支架214上,即机械臂212不能在滑动支架214上移动。在另一些实施例中,机械臂212可移动地安装在滑动支架214上,即机械臂212在滑动支架214上可进行小范围的移动。在本技术的其他实施例中,机械臂212可以不通过滑动支架214,而是以其他方式安置于滑轨210上并沿滑轨210移动。
36.机械臂212具有延伸的臂部,所述臂部的长度是可伸缩的(例如,所述臂部可包括可折叠或可伸缩的部分),因而所述臂部的前端可以伸到指定的位置(例如,装载锁腔室218或设备前端模块202内)。所述臂部的前端可包括用于支撑或保持基片的装置,例如,叶片、桨叶、叉或夹具等。机械臂212可具有一个臂部,也可具有多个臂部以同时传递多个基片。在滑轨210较长、机械臂212可能需要沿滑轨210移动较长距离来传送基片的情形下,需要提高机械臂212传送的稳定性和设备可靠性,例如,可通过精心设计滑轨210和机械臂212的结构以及二者之间的连接结构、采用传感器、信号配合和腔内气流控制等手段来实现平稳的传送和准确的定位。
37.传输腔室208的两侧可设置多个阀门216-1、216-2、216-4和216-4(统称为阀门216)。在此实施例中,传输腔室208处于设备前端模块202与装载锁腔室218之间,因此可为大气传输腔,阀门216为大气阀门。尽管图2中示出了特定数量的阀门216,本领域技术人员将会理解半导体处理系统200可包括更少或更多数量的阀门216。传输腔室208通过阀门216与相应的装载锁腔室218相连。例如,传输腔室208通过阀门216-1与装载锁腔室218-1相连,
传输腔室208通过阀门216-2与装载锁腔室218-2相连,传输腔室208通过阀门216-3与装载锁腔室218-3相连,传输腔室208通过阀门216-4与装载锁腔室218-4相连。机械臂212的臂部的前端可操作以穿过阀门216进入相应的装载锁腔室218,从而将待处理基片放置到装载锁腔室218或者从装载锁腔室218取出经处理基片。
38.装载锁腔室218位于传输腔室208和处理腔室206之间。装载锁腔室218通过真空阀门220与相应的处理腔室206相连。例如,装载锁腔室218-1通过真空阀门220-1与处理腔室206-1相连,装载锁腔室218-2通过真空阀门220-2与处理腔室206-2相连,装载锁腔室218-3通过真空阀门220-3与处理腔室206-1相连,装载锁腔室218-4通过真空阀门220-4与处理腔室206-2相连。装载锁腔室218可包括机械臂(图中未示出),所述机械臂可操作以通过真空阀门220将待处理基片放置到处理腔室206(例如,处理腔室中的处理站232处)或者通过真空阀门220从处理腔室206(例如,处理腔室中的处理站232处)取出经处理基片。在一些实施例中,所述机械臂还可从机械臂212接收基片或将基片传递给机械臂212。在一些实施例中,所述机械臂可进入传输腔室208以从机械臂212接收基片或将基片传递给机械臂212。
39.图2示出了包括4个处理站的处理腔室206-1和206-2。图2中还用虚线部分表示传输腔室208在长度方向上扩展的部分的两侧上也可以布置任意数量的阀门以及相应的装载锁腔室和处理腔室。因此,通过增加传输腔室208以及相应的滑轨210的长度,半导体处理系统200可以增加所搭载的处理腔室的数量,从而提高系统集成度,增加产能。本领域技术人员将会理解半导体处理系统200可包括具有其他形状及配置的装载锁腔室和处理腔室,各处理腔室中也可包括其他不同数量的处理站。在一些实施例中,处理腔室中可包括偶数个处理站。传输腔室208两侧上的阀门及装载锁腔室和处理腔室的位置、数量、类型等可以相同,也可以不同。半导体处理系统200中的处理腔室可用以对基片执行各种半导体加工工艺,例如沉积、蚀刻、清洁等。各处理腔室执行的加工工艺可以相同,也可以不同。
40.传输腔室208在第一端处与设备前端模块202相连。传输腔室208与设备前端模块202之间可设置有门或其他连接或连通结构。传输腔室208中的机械臂212的前端可操作以进入设备前端模块202,从而从设备前端模块202取出待处理基片或者将经处理基片放置到设备前端模块202。
41.设备前端模块202可包括机械臂226。机械臂226可操作以在基片载具230与机械臂212之间传递基片。机械臂226具有延伸的臂部,所述臂部的长度是可伸缩的(例如,所述臂部可包括可折叠或可伸缩的部分),因而所述臂部的前端可以伸到指定的位置(例如,机械臂212处或基片载具230内)。所述臂部的前端可包括用于支撑或保持基片的装置,例如,叶片、桨叶、叉或夹具等。机械臂226可具有一个臂部,也可具有多个臂部以同时传递多个基片。图2示出了位于设备前端模块202一端的4个基片载具230。应理解,基片载具230也可布置于设备前端模块202的其他位置(例如,两侧),也可包含更少或更多的基片载具230。机械臂226可操作以通过设备前端模块202与任一基片载具230之间的门(图中未示出)将待处理基片从基片载具230取出,再传递给机械臂212。机械臂226还可操作以从机械臂212接收经处理基片,再通过设备前端模块202与任一基片载具230之间的门(图中未示出)将经处理基片放置到基片载具230。在一些实施例中,机械臂226可进入传输腔室208以从机械臂212接收基片或将基片传递给机械臂212。
42.在一些实施例中,设备前端模块202可包括滑轨228。机械臂226可安置于滑轨228
上,且可操作以沿滑轨228移动到不同位置传送基片。机械臂226也可通过支架(图中未示出)或其他连接结构安置于滑轨228上。在图2的示例中,滑轨228包括一条轨道。应理解,在其他实施例中,滑轨228可包括其他数量、其他形式的轨道。在本技术的其他实施例中,机械臂226可以不通过滑轨而通过其他方式移动,或者,机械臂226并不移动,而是仅通过延伸的臂部来传送基片。
43.下面结合图2来说明半导体处理系统200中基片的传输方式。当有基片需要处理时,待处理基片置于基片载具230中。机械臂212移动到传输腔室208的第一端附近。机械臂226从基片载具230取出待处理基片,传递给机械臂212。机械臂212移动到进行所需处理的处理腔室206相应的装载锁腔室218附近。装载锁腔室218相应的真空阀门220关闭,大气阀门216开启,装载锁腔室218恢复到大气环境。机械臂212将待处理基片传送到装载锁腔室218。然后,大气阀门216关闭,装载锁腔室218抽真空后,相应的真空阀门220开启。装载锁腔室218内的机械臂通过真空阀门220将待处理基片传送到处理腔室206中。真空阀门220关闭后,对基片进行所需处理。处理完成后,真空阀门220开启,装载锁腔室218内的机械臂将经处理基片从处理腔室206取出到装载锁腔室218。然后真空阀门220关闭,大气阀门216开启,装载锁腔室218恢复到大气环境。机械臂212将经处理基片从装载锁腔室218取出。如果还需要其他处理腔室进行处理,机械臂212可将基片传送到其他处理腔室,否则,机械臂212移动到传输腔室208的第一端附近,将经处理基片传递给机械臂226。机械臂226再将经处理基片传送到基片载具230。
44.本技术提供了一种基片传输模块以及包括所述基片传输模块的半导体处理系统,可以达到提高半导体处理系统的集成度、增加产能的效果。
45.本说明书中的描述经提供以使所述领域的技术人员能够进行或使用本发明。所属领域的技术人员将易于显而易见对本发明的各种修改,且本说明书中所定义的一般原理可应用于其它变化形式而不会脱离本发明的精神或范围。因此,本发明不限于本说明书所述的实例和设计,而是被赋予与本说明书所揭示的原理和新颖特征一致的最宽范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。