1.本实用新型涉及食品机械技术领域,尤其是涉及一种转轴取放装置及自动覆膜机。
背景技术:
2.随着人们对食物质量的要求越来越高,现有的食材通常会采用密封膜对其进行覆膜从而达到保鲜食材的目的。
3.现有的包装方式通常是采用覆膜机对食物进行覆膜,现有的覆膜机通常是采用高温热压的方式将密封膜覆盖于包装容器之上,再将多余的密封膜切割掉,从而完成包装。部分食品容器在进行包装时,需要将转轴与密封膜进行热接,再插入食品容器的装配孔内,使用者在使用时直接通过插拔转轴即可将密封膜撕下。现有的加工方式主要是通过人工手动进行加工,在进行热接时可能对工人造成烫伤,存在一定的安全隐患,而且工作人员劳动强度大,工作效率低,因此有必要予以改进。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的是提供一种转轴取放装置及自动覆膜机,结构简单,通过自动取放的方式对转轴进行取放和安装,安全性高。
5.为了实现上述目的,第一方面,本实用新型提供了一种转轴取放装置及自动覆膜机,包括固定架,固定架安装于覆膜机的机架,固定架安装有移动机构,移动机构安装有取放机构,取放机构用于拾取转轴,移动机构用于带动取放机构进行移动。
6.进一步的技术方案中,所述取放机构的输出端安装有取放爪,所述取放爪用于夹取转轴。
7.取放机构选用开合气缸,所述取放爪安装于开合气缸的输出端,所述开合气缸用于控制取放爪进行开合,所述取放爪的中部开有用于夹持转轴的圆槽。
8.进一步的技术方案中,所述移动机构包括x轴轨道、y轴轨道、z轴轨道和第一旋转机构,x轴轨道安装于固定架的顶部,z轴轨道滑动安装于x轴轨道,y轴轨道滑动安装于z轴轨道,第一旋转机构滑动安装于y轴轨道,所述取放机构安装于第一旋转机构的输出端,所述第一旋转机构用于带动取放机构进行旋转。
9.进一步的技术方案中,所述x轴轨道安装有x轴驱动机构,x轴驱动机构的输出端与所述z轴轨道连接,x轴驱动机构用于带动z轴轨道在x轴轨道上滑动,所述z轴轨道安装有z轴驱动机构,z轴驱动机构的输出端与y轴轨道连接,z轴驱动机构用于带动y轴轨道在x轴轨道上滑动,y轴轨道安装有y轴驱动机构,y轴驱动机构的输出端与所述第一旋转机构连接,y轴驱动机构用于带动第一旋转机构在y轴轨道上滑动。
10.进一步的技术方案中,所述第一旋转机构选用旋转气缸或旋转电机,第一旋转机构的输出端连接有一旋转座,所述取放机构安装于旋转座。
11.进一步的技术方案中,所述z轴轨道的底部连接有第一安装架,第一安装架滑动安
装于x轴轨道,所述x轴驱动机构的输出端与第一安装架连接,x轴驱动机构用于带动第一安装架在x轴轨道上滑动,所述y轴轨道的底部连接有第二安装架,第二安装架滑动安装于z轴轨道,所述z轴驱动机构的输出端与第二安装架连接,z轴驱动机构用于带动第二安装架在z轴轨道上滑动,所述第一旋转机构的底部连接有第三安装架,第三安装架滑动安装于y轴轨道,y轴驱动机构的输出端与第三安装架连接,y轴驱动机构用于带动第三安装架在所述y轴轨道上滑动。
12.进一步的技术方案中,所述x轴驱动机构、y轴驱动机构和z轴驱动机构选用丝杆传动、齿轮传动或链条传动中的一种或多种传动方式。
13.进一步的技术方案中,所述x轴轨道安装有限定所述z轴轨道位置的第一传感器,z轴轨道安装有限定所述y轴轨道位置的第二传感器,y轴轨道安装有限定所述第一旋转机构位置的第三传感器。
14.第二方面,本实用新型还提供了一种自动覆膜机,包括第一方面所述的转轴取放装置。
15.采用上述结构后,本实用新型和现有技术相比所具有的优点是:本实用新型的一种转轴取放装置及自动覆膜机,转轴取放装置的结构简单,通过自动取放的方式对转轴进行取放和安装,安全性高,降低工作人员劳动强度,提高工作效率。
附图说明
16.下面结合附图和实施例对本实用新型进一步说明。
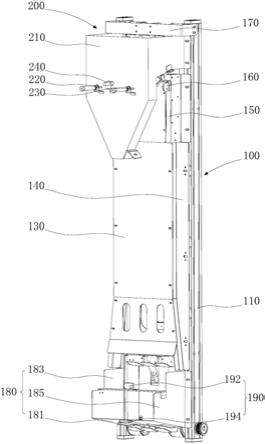
17.图1是自动覆膜机的结构示意图。
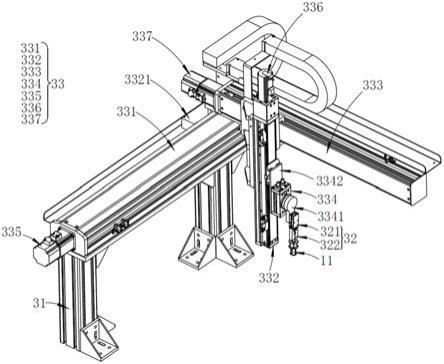
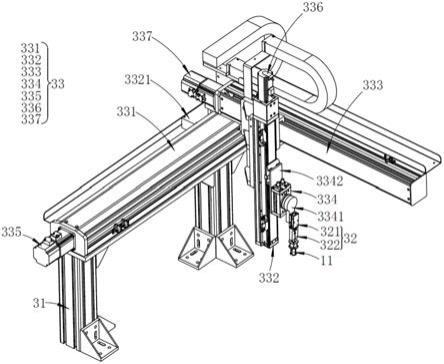
18.图2是转轴取放装置的结构示意图。
19.图3是取放机构和第一旋转机构的结构示意图。
20.图4是本实用新型的取放机构和第一旋转机构的分解示意图。
21.图中:
[0022]1‑
机架、11
‑
转轴、12
‑
食品容器、13
‑
转轴料盘、
[0023]2‑
覆膜装置;
[0024]3‑
转轴取放装置、31
‑
固定架、32
‑
取放机构、321
‑
开合气缸、322
‑
取放爪、3221
‑
圆槽、33
‑
移动机构、331
‑
x轴轨道、332
‑
y轴轨道、3321
‑
第一安装架、333
‑
z轴轨道、3331
‑
第二安装架、334
‑
第一旋转机构、3341
‑
旋转座、3342
‑
第三安装架、335
‑
x轴驱动机构、336
‑
y轴驱动机构、337
‑
z轴驱动机构;
[0025]4‑
膜体拼接装置;
[0026]5‑
容器装载装置;
[0027]6‑
易撕带热接装置;
[0028]7‑
辅助插接装置。
具体实施方式
[0029]
以下仅为本实用新型的较佳实施例,并不因此而限定本实用新型的保护范围。
[0030]
实施例1,一种自动覆膜机。
[0031]
请参阅图1
‑
图4,一种自动覆膜机,包括:
[0032]
机架1,设置有加工工位;
[0033]
覆膜装置2,用于对位于加工工位的待加工食品容器12进行覆膜;
[0034]
转轴取放装置3,用于抓取转轴11并带动转轴11进行移动;及
[0035]
膜体拼接装置4;用于将转轴11与密封膜进行连接;
[0036]
其中,转轴取放装置3还用于将与密封膜完成连接的转轴11插置安装于待加工食品容器12上。
[0037]
本发明采用自动加工的方式对食品容器12进行加工,在进行加工时,通过覆膜装置2对食品容器12进行覆膜,再通过膜体拼接装置4将转轴11与密封膜的进行连接,再将转轴11插入食品容器12上,从而完成食品容器12的加工,该自动覆膜机提高了生产效率,降低了生产成本,减少了工作人员的劳动强度,使用者在对食品容器12进行使用时,通过加热的机器对食品容器12进行加热时,加热的机器先旋转转轴11,使转轴11拉扯密封膜并将密封膜从食品容器12上撕下,从而使食物进行混合,然后进行加热,加热完成后,使用者只需要取下食品容器12的上碗体便可直接进行使用,避免食材受到污染,减少安全隐患。
[0038]
转轴取放装置3包括固定架31、用于拾取转轴11的取放机构32和用于带动取放机构32进行移动的移动机构33,固定架31安装于机架1,移动机构33安装于固定架31,取放机构32安装于移动机构33。
[0039]
通过取放机构32对转轴11进行抓取,带动转轴11进行取放和安装,避免了人工作业过程中出现的安全隐患,且降低了工作人员的劳动强度,提高了工作效率。
[0040]
取放机构32的输出端安装有取放爪322,取放爪322用于夹取转轴11进行热接和安装。
[0041]
取放机构32选用开合气缸321,取放爪322安装于开合气缸321的输出端,开和气缸用于控制取放爪322进行开合。通过开合气缸321控制取放爪322得开合,从而实现取放爪322抓取转轴11。
[0042]
取放爪322的中部开有用于夹持转轴11的圆槽3221。通过圆槽3221使取放爪322夹取转轴11更加顺畅,加强取放爪322抓取的稳定性。
[0043]
移动机构33包括x轴轨道331、y轴轨道332、z轴轨道333和第一旋转机构334,x轴轨道331安装于固定架311的顶部,z轴轨道333滑动安装于x轴轨道331,y轴轨道332滑动安装于z轴轨道333,第一旋转机构334滑动安装于y轴轨道332,第一旋转机构334安装于第一旋转机构334的输出端,用于带动取放机构32进行旋转。
[0044]
x轴轨道331安装有x轴驱动机构335,x轴驱动机构335的输出端与z轴轨道333连接,x轴驱动机构335用于带动z轴轨道333在x轴轨道331上滑动,z轴轨道333安装有z轴驱动机构337,z轴驱动机构337的输出端与y轴轨道332连接,z轴驱动机构337用于带动y轴轨道332在x轴轨道331上滑动,y轴轨道332安装有y轴驱动机构336,y轴驱动机构336的输出端与取放机构32连接,y轴驱动机构336用于带动第一旋转机构334在y轴轨道332上滑动。通过x轴轨道331、y轴轨道332、z轴轨道333、x轴驱动机构335、y轴驱动机构336和z轴驱动机构337实现取放机构32的前后、左右、上下的移动。
[0045]
第一旋转机构334选用旋转气缸或旋转电机,第一旋转机构334的输出端连接有一旋转座3341,取放机构32安装于旋转座3341。通过第一旋转机构334实现取放机构32的旋转,作为一个优选的实施方式,本实用新型得第一旋转机构334选用旋转气缸。
[0046]
z轴轨道333的底部连接有第一安装架3321,第一安装架3321滑动安装于x轴轨道331,x轴驱动机构335的输出端与第一安装架3321连接,x轴驱动机构335用于带动第一安装架3321在x轴轨道331上滑动,y轴轨道332的底部连接有第二安装架3331,第二安装架3331滑动安装于z轴轨道333,z轴驱动机构337的输出端与第二安装架3331连接,z轴驱动机构337用于带动第二安装架3331在z轴轨道333上滑动,第一旋转机构334的底部连接有第三安装架3342,第三安装架3342滑动安装于y轴轨道332,y轴驱动机构336的输出端与第三安装架3342连接,y轴驱动机构336用于带动第三安装架3342在y轴轨道332上滑动。通过第一安装架3321、第二安装架3331和第三安装架3342加强取放机构32移动的稳定性。
[0047]
x轴驱动机构335、y轴驱动机构336和z轴驱动机构337选用丝杆传动、齿轮传动或链条传动中的一种或多种传动方式。作为一个优选的实施方式,本实用新型的x轴驱动机构335、y轴驱动机构336和z轴驱动机构337分别选用丝杆传动,即在电机的输出端安装丝杆,丝杆上套有螺母座,螺母座安装于第一安装架3321、第二安装架3331和第三安装架3342的底部,电机旋转时带动丝杆进行旋转,从而使螺母座滑动于丝杆。
[0048]
x轴轨道331安装有限定z轴轨道333位置的第一传感器,z轴轨道333安装有限定y轴轨道332位置的第二传感器,y轴轨道332安装有限定第一旋转机构334位置的第三传感器。通过第一传感器、第二传感器和第三传感器对取放机构32的移动位置进行限位。
[0049]
在其他的具体实施例中,进一步的,覆膜装置2包括覆膜架、送膜机构和覆膜机构,覆膜架安装于机架1,送膜机构和覆膜机构分别安装于覆膜架,送膜机构用于输送密封膜,覆膜机构用于对待加工食品容器12进行覆膜;
[0050]
通过送膜机构将密封膜料带输送至覆膜机构的待覆膜区域,覆膜机构对待覆膜区域内的密封膜料带进行切割,并将切割后的密封膜覆盖至待覆膜食品容器12上进行热压,从而完成食品容器12的覆膜工作,该覆膜装置2覆膜速度快,效果好,稳定性强;
[0051]
在其他的具体实施例中,进一步的,覆膜机构包括安装座、驱动机构和热压机构,安装座安装于覆膜架,驱动机构安装于安装座的顶部,驱动机构的输出端贯穿安装座与热压机构连接;
[0052]
在其他的具体实施例中,进一步的,热压机构包括热压块和切膜模具,切膜模具安装于热压块的外侧,热压块的下方设置有按压板和固定板,固定板与覆膜架连接,按压板设置于固定板和热压机构之间,热压块与安装座之间设置有安装板,安装板和按压板之间设置有用于限定按压板位置的缓冲机构,固定板与热压块之间设置有垫板;
[0053]
通过切膜模具对密封膜料带进行切割,通过热压机构将切割下来的密封膜与待覆膜食品容器12进行覆膜,通过固定板可以用于放置输送的密封膜料带,密封膜料带在固定板上进行切割后,通过送膜机构的回收端进行回收;
[0054]
缓冲机构包括连接件和弹性件,连接件的第一端与安装板连接,连接件的第二端与按压板连接,弹性件套于连接件,弹性件的顶部抵顶于安装板,弹性件的底部抵顶于按压板;
[0055]
按压板开有用于通过热压机构的第一通槽,垫板开有用于通过热压机构的第二通槽,固定板开有用于通过热压机构的第三通槽,
[0056]
热压块安装于安装板的底部,驱动机构的输出端贯穿安装座与安装板的顶部连接,用于带动热压机构上下移动于第一通槽、第二通槽和第三通槽;
[0057]
连接件可以滑动于按压板,也可以滑动于安装板,作为一个优选的实施方式,本实施例的连接件滑动于按压板。弹性件选用弹簧。
[0058]
通过按压板可以先一步对密封膜料带进行固定,在进行覆膜时,送膜机构将密封膜料带输送至固定板上,驱动机构带动热压机构向下移动,在缓冲机构的配合下,按压板先接触到密封膜料带,将密封膜料带按压固定在固定板上,避免在切膜过程中出现偏移的现象,保证覆膜后的密封膜外表美观,没有皱褶;驱动机构继续带动热压机构向下移动,由于按压板抵顶在固定板上,不能进行移动,因此,按压板会与安装板之间的距离不断缩小,弹性件受到挤压进行压缩,当连接件滑动于按压板时,连接件的下端部会逐渐接近按压板的底部,当连接件滑动于安装板时,连接件的上端部会逐渐接近安装板的顶部,热压机构依次穿过第一通槽、第二通槽和第三通槽后将密封膜覆盖于待覆膜食品容器12上进行热压覆膜。覆膜完成后驱动机构带动热压机构依次退出第三通槽、第二通槽和第一通槽回到原点,弹性件不断伸张,使按压板再次位于热压机构和固定板之间,回到原点,通过缓冲机构的设置,使按压板在热压机构对密封膜进行热压时,按压板通过第一通槽环绕热压机构。
[0059]
固定板的顶部向下凹入形成一安装槽,垫板安装于安装槽;在切膜模具在进行切割密封膜出现偏移时,垫板能够对切膜模具进行有效的防护,避免撞刀损坏切膜模具。
[0060]
覆膜架安装有传动机构和感应机构,传动机构的输出端与送膜机构连接,感应机构的感应端朝向送膜机构;
[0061]
通过驱动机构带动热压机构下压对密封膜料带进行切膜,并将切好的密封膜与食品容器12进行热压,通过传动机构旋转带动送膜机构对密封膜进行输送,通过感应机构对送膜机构进行感应,并根据送膜机构的状态对传动机构的旋转速度进行控制,从而达到控制密封膜输送速度的目的,使密封膜的输送速度能够稳定,提高了工作效率。
[0062]
送膜机构包括用于输送密封膜的送料盘和用于回收密封膜的收料盘,送料盘和收料盘分别安装有密封膜料卷,送料盘和收料盘分别安装于覆膜架,
[0063]
感应机构包括感应架、感应器、感应轮和滑动架,感应架安装于覆膜架,滑动架滑动安装于感应架,感应器安装于滑动架,感应轮旋转安装于滑动架的一侧,感应器的感应端朝向感应轮的内侧;
[0064]
感应轮的底部向下抵压送料盘的密封膜料卷,当送料盘的密封膜料卷厚度减少时,感应轮跟随密封膜料卷逐渐下降;
[0065]
通过感应机构对送料盘的密封膜料卷的厚度进行监控,当送料盘的密封膜料卷厚度减少时,感应轮跟随密封膜料卷逐渐下降,密封膜料卷在进行旋转时,感应轮跟随密封膜料卷进行旋转,感应机构根据感应轮的旋转速度对传动机构的传动速度进行调整,使密封膜的传送速度能够稳定,提高生产效率,降低生产成本,减少工作人员的劳动强度。
[0066]
送料盘在转动时,感应轮会跟着送料盘的密封膜料卷进行转动,感应器通过监控感应轮的转动速度从而控制传动机构的旋转速度,使送料盘和收料盘的线速度保持一致,且下压在密封膜料卷上的感应机构能够对密封膜料卷保持一定的压力,避免拉力过大导致密封膜料卷转动过多,从而导致密封膜掉落在机台上对密封膜造成污染。
[0067]
在其他的具体实施例中,进一步的,包括容器装载装置5;
[0068]
容器装载装置5包括第二旋转机构和用于放置食品容器12的第一工作台,第二旋转机构安装于机架1,第二旋转机构的输出端与第一工作台连接,第一工作台设置有用于放
置待加工食品容器12的加工工位;
[0069]
当覆膜装置2对一个待覆膜食品容器12完成加工时,第二旋转机构带动工作台进行旋转,使另一放置有待覆膜食品容器12的加工工位移动至覆膜装置2的下方进行加工。该设置结构简单,使用方便,在完成一个待加工食品容器12的加工后,能够自动切换待加工食品容器12进行加工,提高了生产效率,降低了生产成本。
[0070]
在其他的具体实施例中,进一步的,工作台的底部安装有顶起机构,顶起机构的输出端安装有定位座,顶起机构推动定位座上下移动于加工工位;
[0071]
通过加工工位放置食品容器12,通过顶起机构推动定位座,使其带动食品容器12向上移动,缩短待加工食品容器12与覆膜装置2之间的距离,顶起机构回缩时,通过定位座带动待加工食品容器12向下移动,扩大待加工食品容器12与覆膜装置2之间的距离,使该覆膜装置2能够适用于不同高度的食品容器12的加工。
[0072]
在其他的具体实施例中,进一步的,包括易撕带热接装置6;
[0073]
易撕带热接装置6包括热接架、热接机构和切带机构,热接架安装于机架1,热接架安装有易撕带料盘,热接机构用于将易撕带与转轴11进行热压,切带机构用于对易撕带进行切割;
[0074]
通过易撕带料盘输送易撕带,通过热接机构将易撕带与转轴11进行热接,通过切带机构将热接好的易撕带进行切割,再通转轴取放装置3将热接好的易撕带和转轴11抓取至待加工食品容器12上方,将转轴11插入待加工食品容器12的装配孔内,结构简单,降低工作人员的劳动强度,提高工作效率,减少安全隐患。
[0075]
热接架安装有按压机构、用于通过易撕带的过料轨道和传动轮组,传动轮组安装于过料轨道和易撕带料盘之间,按压机构安装于过料轨道的上方,
[0076]
热接架的一侧安装有升降机构,切带机构和热接机构分别安装于升降机构的输出端,热接机构的输出端朝向过料轨道的输出端,按压机构的输出端安装有按压块,当转轴11放置于过料轨道的输出端时,按压机构推动按压块下压转轴11和易撕带,升降机构带动热接机构上升热压易撕带和转轴11,将易撕带与转轴11进行拼接,升降机构推动切带机构上升切割易撕带;
[0077]
通过传动轮组将易撕带输送至过料轨道内,过料轨道对易撕带的两侧进行限位,通过按压机构推动按压块对过料轨道内的易撕带进行按压固定,同时按压机构也可以对位于过料轨道输出端的转轴11进行按压,确保转轴11的位置,使升降机构推动热接机构上升对转轴11和易撕带进行热压时,转轴11不会因为上升的力过大,而脱离转轴取放装置3的取放爪322。升降机构用于带动热接机构和切带机构进行上升,热接机构对转轴11和易撕带进行热压,使两者进行热接,切带机构对热接好的易撕带进行切割,转轴取放装置3将完成热接的转轴11移动至食品容器12上方,并将转轴11插入食品容器12的装配孔内。
[0078]
在其他的具体实施例中,进一步的,膜体拼接装置4包括拾取机构、拼接机构和滑动机构,滑动机构安装于机架1,滑动机构用于带动拾取机构和拼接机构进行移动,拾取机构用于拾取易撕带热接装置6上的易撕带,拼接机构用于将易撕带与密封膜进行热接。
[0079]
通过滑动机构带动拾取机构进行移动,拾取机构对易撕带热接装置6上的易撕带进行抓取,滑动机构再带动拾取机构回到原点,拾取机构将抓取的易撕带与密封膜进行重叠,拼接机构将易撕带和密封膜进行热接,该设置在转轴11插入待加工食品容器12的装配
孔后,通过旋转转轴11能够对易撕带进行拉扯,从而将密封膜从食品容器12上撕下。通过自动拼接的方式对密封膜和易撕带进行拼接,提高了生产效率,降低了生产成本。
[0080]
滑动机构安装有固定座,固定座安装有用于易撕带和密封膜进行拼接的第二工作台,拾取机构安装于固定座,第二工作台的上方安装有第一推动机构,第一推动机构安装于固定座,拼接机构安装于第一推动机构的输出端;
[0081]
拾取机构包括拾取气缸和拾取爪,拾取气缸安装于安装座,拾取爪安装于拾取气缸的输出端。
[0082]
通过滑动机构带动固定座进行移动,固定座上的拾取机构对易撕带进行抓取,并将易撕带的一端放置于第二工作台上与密封膜进行重叠,第一推动机构推动拼接机构下压对易撕带和密封膜进行热压拼接,使易撕带和密封膜热接在一起,而易撕带的另一端通过易撕带热接装置6将其与转轴11进行热接,因此,转轴11通过拉扯易撕带即可将密封膜从食品容器12上撕下。
[0083]
在其他的具体实施例中,进一步的,还包括辅助插装置,辅助插接装置7包括安装架、辅助机构和拧紧机构,安装架安装于机架1,辅助机构和拧紧机构分别安装于安装架;
[0084]
通过辅助机构对转轴11插入食品容器12的装配孔时进行辅助,减少进行装配时所需要的力,避免在安装转轴11时,因为用力过大导致转轴11从取放机构32上掉出。
[0085]
辅助机构包括夹紧机构和用于推动夹紧机构移动的第二推动机构,第二推动机构安装于安装架,夹紧机构安装于第二推动机构的输出端,夹紧机构设置有用于对转轴11进行挤压的夹持腔;
[0086]
通过第二推动机构推动夹紧机构进行移动,使夹持腔位于食品容器12的装配孔的正上方,方便取放机构32夹持转轴11将其穿过夹持腔进入食品容器12的装配孔内。
[0087]
拧紧机构包括第三旋转机构和用于推动第三旋转机构移动的第三推动机构,第三推动机构安装于安装架,第三旋转机构安装于第三推动机构的输出端,第三旋转机构的输出端安装有用于固定转轴11的锁紧件。
[0088]
通过第三推动机构推动第三旋转机构进行升降,使锁紧件与转轴11进行卡合,第三旋转机构通过锁紧件带动转轴11进行旋转,从而使转轴11、易撕带和密封膜之间绷紧,减少易撕带与食品容器12之间的缝隙,避免易撕带与食品容器12内的食材进行缠绕,在撕开密封膜时更加方便。
[0089]
在其他的具体实施例中,进一步的,夹紧机构包括夹紧气缸和夹爪,夹紧气缸安装于第一推动机构的输出端,夹爪安装于夹紧气缸的输出端,夹紧气缸用于控制夹爪的开合,夹爪合拢时形成夹持腔;
[0090]
夹持腔的底部设置有安装槽,夹持腔的直径从上至下的变化趋势为逐渐变小。
[0091]
通过夹紧气缸控制夹爪进行开合,作为一个优选的实施方式,本实施例的夹爪的截面为梯形形状,转轴11在通过夹持腔进入食品容器12的装配孔时,受到夹持腔逐渐缩小的内壁的压迫,使转轴11的下端部在压力的作用下逐渐合拢,使转轴11下端部的直径与食品容器12的装配孔的直径一致或略小,便于插入装配孔内,进入安装槽后使转轴11下端部的直径保持不变,直到转轴11的下端部穿过安装槽的底部进入食品容器12的装配孔内,夹紧气缸再控制夹爪打开,取放机构32带动转轴11将其放入食品容器12的装配孔内完成装配。为了使转轴11与食品容器12的转配孔更好的进行装配固定,转轴11的下端部通常为具
有弹性的弹片,弹片的直径大于装配孔的直径。通过辅助机构的设置能够减少进行装配时所需要的力,避免在安装转轴11时,因为用力过大导致转轴11从取放机构32上掉出。采用自动化的装配方式减少了工作人员的劳动强度,提高了工作效率。
[0092]
根据使用者的实际需求,本实施例的转轴11在进行装配时,可以先通过夹紧气缸控制夹爪进行合拢形成夹持腔,第二推动机构推动夹紧机构移动至食品容器12的转配孔的上方,使夹持腔与装配孔的圆心保持同心,再通过取放机构32将转轴11移动至夹持腔上方进行装配,转轴11在通过夹持腔时,转轴11的下端部受到夹持腔的挤压逐渐缩小直径,直到与装配孔的大小一致或略小,转轴11的下端部经过夹持腔进入安装槽内后通过安装槽保持该直径大小,转轴11的下端部再经过安装槽进入装配孔内,此时夹紧气缸控制夹爪打开,取放机构32再带动转轴11完全进入装配孔内与食品容器12卡接。
[0093]
根据使用者的实际需求,本实施例的转轴11在进行装配时,也可以先通过取放机构32将转轴11放置食品容器12的转配孔的上方,第二推动机构推动夹紧机构移动至食品容器12的装配孔的上方,再通过夹紧气缸控制夹爪进行合拢,对转轴11的下端部进行挤压,缩小转轴11下端部的直径,使其与装配孔的大小一致或略小,再通过取放机构32带动转轴11的下端部穿过夹持腔和安装槽进入装配孔内,此时夹紧气缸控制夹爪打开,取放机构32带动转轴11进入装配孔内与食品容器12卡接,该设置也可以直接通过夹爪的圆槽3221对转轴11的下端部进行挤压,当转轴11下端部的直径缩小到与装配孔的大小一致或略小时,即可通过取放机构32带动转轴11进入装配孔。
[0094]
锁紧件设置有用于插入转轴11的安装孔,安装孔的外端开有卡槽;
[0095]
通过第三推动机构向下推动第三旋转机构,从而使锁紧件的安装孔包裹转轴11的上端部,并使卡槽与转轴11卡接,卡槽对转轴11的位置进行限定,在安装孔和卡槽的配合下,第三旋转机构在进行旋转时,带动转轴11进行旋转,从而使转轴11、易撕带和密封膜之间绷紧,达到减少易撕带与食品容器12之间的缝隙的目的。
[0096]
在其他的具体实施例中,进一步的,机架1上安装有转轴料盘13,转轴料盘13放置有若干转轴11。
[0097]
通过转轴料盘13对转轴11进行收纳,当转轴11用完时,直接替换转轴料盘13,结构简单,换料方便,提高工作效率。
[0098]
本实施例的自动覆膜机在进行使用时,将食品容器12放置在容器装载装置5的加工工位内,顶起机构带动定位座向下或向上移动,使其带动食品容器12进行移动,对食品容器12与覆膜装置2之间的距离进行调节;
[0099]
顶起机构通过定位座带动待加工食品容器12进行移动,从而调节待加工食品容器12与覆膜装置2之间的距离,使该覆膜装置2能够适用于不同高度的食品容器12的加工。
[0100]
送膜机构将密封膜料带输送至固定板和垫板上,驱动机构带动热压机构向下移动,按压板先接触到密封膜料带,将密封膜料带按压固定在固定板和垫板上,驱动机构继续带动热压机构向下移动,按压板与安装板之间的距离不断缩小,弹性件受到挤压进行压缩,热压机构穿过第一通槽,切膜模具对密封膜料带进行切割,热压机构穿过第二通槽和第三通槽并将切割后的密封膜覆盖于食品容器12上进行热压覆膜,并形成一密封膜尾端,完成覆膜后驱动机构带动热压机构向上移动,热压机构依次退出第三通槽、第二通槽和第一通槽回到原点,弹性件不断伸张,使按压板再次位于热压机构和固定板之间,回到原点。
[0101]
通过按压板先一步接触密封膜,并对密封膜料带进行固定,避免在切膜过程中出现偏移的现象,保证覆膜后的密封膜外表美观,没有皱褶,
[0102]
切膜模具在进行切割密封膜出现偏移时,通过垫板能够对切膜模具进行有效的防护,避免撞刀损坏切膜模具。
[0103]
第二旋转机构带动工作台进行旋转,将已覆膜的食品容器12旋转至下一工位进行加工,将待覆膜的食品容器12旋转至覆膜装置2下方进行覆膜,已覆膜的食品容器12进入下一工位后,密封膜的尾端落入膜体拼接装置4的第二工作台上。
[0104]
该设置通过自动旋转的方式对食品容器12进行搬运,降低了工作人员的劳动强度,提高了生产效率。
[0105]
易撕带热接机构的易撕带料盘将易撕带经过传动轮组输送至过料轨道的输出端,膜体拼接装置4的滑动机构带动拾取机构进行移动,拾取机构移动至过料轨道的输出端,密封膜尾端离开第二工作台进行悬空,拾取气缸控制拾取爪对易撕带热接装置6上的易撕带进行抓取,滑动机构再带动拾取机构回到原点,密封膜尾端进入第二工作台,拾取气缸控制拾取爪打开,将抓取的易撕带落入工作台与密封膜进行重叠,第一推动机构推动拼接机构下压对易撕带和密封膜进行热接。
[0106]
通过该设置使转轴11插入待加工食品容器12后,旋转转轴11,转轴11能够通过易撕带带动密封膜进行拉扯,从而将密封膜从食品容器12上撕下。通过自动化拼接的方式对密封膜和易撕带进行拼接,提高了生产效率,降低了生产成本。
[0107]
转轴取放装置3通过移动机构33带动取放机构32移动至转轴料盘13的上方,取放机构32对转轴11进行抓取,移动机构33带动取放机构32移动至过料轨道的输出端,取放机构32旋转使转轴11的与易撕带进行重叠。
[0108]
通过转轴取放装置3对转轴11进行抓取和安装,避免了人工作业过程中出现的安全隐患,且降低了工作人员的劳动强度,提高了工作效率。
[0109]
按压机构推动按压块向下移动,对过料轨道内的易撕带进行按压固定,同时也对转轴11进行按压,升降机构带动热接机构上升对转轴11和易撕带进行热压,使两者进行热接,升降机构带动热接机构上升的同时带动切带机构上升对易撕带进行切割。
[0110]
通过按压机构对易撕带和转轴11进行按压固定,防止在切割过程中切带机构难以切断易撕带,防止在热接过程中,热接机构上升的压力过大,导致转轴11脱离转轴取放装置3的取放爪322。该设置结构简单,通过自动热接的方式,减少了安全隐患。
[0111]
辅助插接装置7的夹紧气缸控制夹爪进合拢形成夹持腔,第二推动机构推动辅助机构进行移动,使辅助机构的夹爪移动至食品容器12装配孔的上方,使夹持腔与食品容器12的装配孔的圆心保持同心,再通过移动机构33将转轴11移动至夹持腔上方进行装配,转轴11在通过夹持腔时,转轴11的下端部受到夹持腔的挤压逐渐缩小直径,直到与装配孔的大小一致或略小,转轴11的下端部经过夹持腔进入安装槽内后通过安装槽保持该直径大小,转轴11的下端部再经过安装槽进入装配孔内,此时夹紧气缸控制夹爪打开,取放机构32再带动转轴11完全进入装配孔内与食品容器12卡接,转轴取放装置3完成转轴11的安装后回到原点,继续夹取另一转轴11进行下一食品容器12的装配。
[0112]
为了使转轴11与食品容器12的转配孔更好的进行装配固定,转轴11的下端部通常为具有弹性的弹片,弹片的直径大于装配孔的直径。通过该设置能够减少进行装配时所需
要的力,避免在安装转轴11时,因为用力过大导致转轴11从取放机构32上掉出。采用自动化的装配方式减少了工作人员的劳动强度,提高了工作效率。
[0113]
容器装载装置5的第二旋转机构带动第一工作台进行旋转,使已装配好的食品容器12旋转至拧紧机构的下方,第三推动机构推动第三旋转机构带动锁紧件向下移动,锁紧件通过安装孔包裹转轴11的上端部,并使卡槽与转轴11卡接,第三旋转机构通过锁紧件带动转轴11进行旋转,使转轴11、易撕带和密封膜之间绷紧,第三推动机构通过第三旋转机构带动锁紧件回到原点。
[0114]
通过卡槽对转轴11的位置进行限定,在安装孔和卡槽的配合下,第三旋转机构在进行旋转时能够带动转轴11进行旋转,从而使转轴11、易撕带和密封膜之间绷紧,达到减少易撕带与食品容器12之间的缝隙的目的。
[0115]
容器装载装置5的第二旋转机构带动第一工作台进行旋转,使已拧紧转轴11的食品容器12旋转离开拧紧机构的下方,工作人员将其取出,再将待加工食品容器12放入加工工位内,从而完成整个食品容器12的加工。
[0116]
通过第二旋转机构带动第一工作台进行旋转,从而将已加工完的食品容器12退出待加工的区域,将待加工的食品容器12送入待加工区域,减少了更换时间。
[0117]
本实施例采用自动化的加工方式,提高了加工效率,降低了加工成本,减少了工作人员的劳动强度。
[0118]
以上内容仅为本实用新型的较佳实施例,对于本领域的普通技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。