1.本实用新型涉及水产养殖设备技术领域,特别是涉及一种轮式遥控水产养殖信息获取装置。
背景技术:
2.水产养殖是我国农村养殖的重要支柱产业,近年来取得了快速发展,面对我国对于鱼虾的需求量的增加,水产养殖如何实现智能化、机械化成为又一个亮点。现在人们除吃饱之外,更加注重吃好、吃的健康,人们对鱼虾的品质及健康要求越来越高,这就需要加强对鱼虾养殖的监控。我国现有的水产养殖信息获取装置还停留在初始阶段,仅在固定处安装摄像头,无法对鱼群实行精准的信息获取。传统的通过捕捞方式获取鱼群信息,不仅会对鱼体造成伤害,而且还会对鱼群造成惊吓,从而一定程度上会导致产量的下降;因此,继续改进水产养殖信息获取装置,加强水产养殖监测。
技术实现要素:
3.本实用新型的目的是提供一种轮式遥控水产养殖信息获取装置,解决上述现有技术存在的问题,可以在远距离遥控,减轻了人工作业量,实现鱼虾群体养殖信息的精准获取,同时,将对鱼虾等群体的影响降到最低。
4.为实现上述目的,本实用新型提供了如下方案:
5.一种轮式遥控水产养殖信息获取装置,该装置包括:车体以及设置在车体底部的行走底盘,所述行走底盘内部搭载有若干组供电电池,所述供电电池用于为所述装置供电;所述行走底盘的末端左右两侧分别安装有直流电机,左、右两侧的直流电机分别驱动连接左驱动轮、右驱动轮,所述行走底盘的前端安装有辅助轮;
6.所述行走底盘的上部设置有控制柜和升降平台,所述升降平台设置在所述控制柜的左侧,所述升降平台上方设置有转动平台,所述转动平台设置有步进电机一以及与步进电机一驱动连接的机械臂,所述步进电机一驱动所述机械臂转向运动;所述机械臂包括主杆以及与主杆连接的电控伸缩杆,所述电控伸缩杆与步进电机二驱动连接,所述步进电机二驱动所述电控伸缩杆伸缩运动,所述电控伸缩杆的前端安装有摄像头;
7.所述控制柜内设置有控制器以及与控制器电性连接的无线通信模块、两个直流电机驱动器、两个步进电机驱动器,两个直流电机驱动器分别与左、右两侧的直流电机电性连接,两个步进电机驱动器分别与步进电机一、步进电机二电性连接,所述控制器通过所述无线通信模块与遥控终端通信连接,所述摄像头与所述控制器电性连接。
8.进一步的,所述摄像头为360
°
的红外夜视摄像头。
9.进一步的,所述升降平台为剪叉式升降平台。
10.进一步的,所述供电电池采用锂电池,并设置有4组。
11.进一步的,所述控制器为单片机,型号为stm32f103zet6。
12.进一步的,所述左驱动轮和右驱动轮的正上方分别设置有霍尔传感器,所述左驱
动轮和右驱动轮上设置有小磁铁,两个所述霍尔传感器通过感应所述小磁铁对左驱动轮和右驱动轮的转速进行监测;两个所述霍尔传感器电性连接所述控制器。
13.进一步的,所述控制柜上设置有应急电闸,所述应急电闸用于控制所述供电电池的供电线路的通断。
14.进一步的,所述无线通信模块包括信号接收天线和信号接收机,所述信号接收天线设置在所述控制柜的顶端,所述信号接收机设置在所述控制柜的内部,所述信号接收天线与所述信号接收机连接,所述信号接收机与所述控制器电性连接。
15.进一步的,所述装置还包括角度传感器,两个所述角度传感器设置在左驱动轮和右驱动轮上,用于获取左驱动轮和右驱动轮的偏转角度,两个所述角度传感器电性连接所述控制器。
16.进一步的,所述左驱动轮、右驱动轮、辅助轮均安装有防滑轮胎。
17.根据本实用新型提供的具体实施例,本实用新型公开了以下技术效果:本实用新型提供的轮式遥控水产养殖信息获取装置,控制柜内的控制器通过无线通信模块与遥控终端远程无线通信连接,可以实现远距离遥控,减轻了人工作业量,实现鱼虾群体养殖信息的精准获取,同时,减少了对鱼虾等群体;所述升降平台与转向平台配合,能够驱动机械臂实现上下左右移动,从而带动机械臂上位于电控伸缩杆末端的摄像头移动,实现多角度、全方位的图像信息采集;分别单独的直流电机驱动左、右驱动轮,可以实现装置的转弯移动,并且任何一个驱动轮受到地面冲击时不影响另一个驱动轮的正常运动,减少了车身受到的冲击力,提高了驱动轮对地面的附着力。
附图说明
18.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
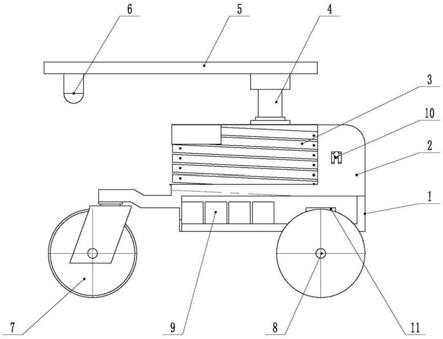
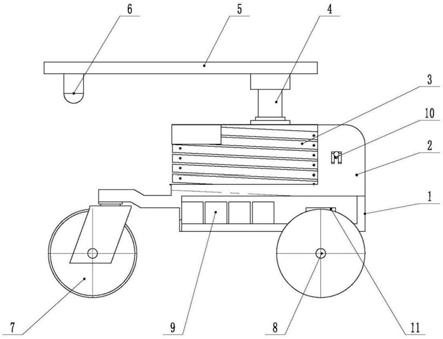
19.图1为本实用新型一种轮式遥控水产养殖信息获取装置的结构示意图;
20.图2为本实用新型一种轮式遥控水产养殖信息获取装置控制柜内部结构示意图;
21.图3为本实用新型一种轮式遥控水产养殖信息获取装置的控制原理图;
22.附图标记:1
‑
车体,2
‑
控制柜,3
‑
剪叉式升降平台,4
‑
转动平台,5
‑
机械臂室,6
‑
摄像头,7
‑
辅助轮,8
‑
左驱动轮,9
‑
供电电池,10
‑
应急电闸,11
‑
直流电机,12
‑
控制器,13
‑
直流电机驱动器一,14
‑
直流电机驱动器二,15
‑
步进电机驱动器一,16
‑
步进电机驱动器二。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.本实用新型的目的是提供一种轮式遥控水产养殖信息获取装置,解决上述现有技术存在的问题,可以在远距离遥控,减轻了人工作业量,实现鱼虾群体养殖信息的精准获
取,同时,将对鱼虾等群体的影响降到最低。
25.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
26.如图1所示,本实用新型实施例提供的轮式遥控水产养殖信息获取装置,包括:车体1以及设置在车体1底部的行走底盘,所述行走底盘内部搭载有若干组供电电池9,所述供电电池9采用锂电池,并设置有4组,所述供电电池9用于为所述装置供电;所述行走底盘的末端左右两侧分别安装有直流电机11,左、右两侧的直流电机11分别驱动连接左驱动轮8、右驱动轮,图1中为左驱动轮8,所述行走底盘的前端安装有辅助轮7,辅助轮7伴随着驱动轮而转动;所述行走底盘中设置的两个直流电机通过齿轮转动带动驱动轮的转动。
27.所述行走底盘的上部设置有控制柜2和升降平台,所述升降平台设置在所述控制柜2的左侧,所述升降平台为剪叉式升降平台3,其剪叉机械结构中上下各有一侧铰接点固定,另一侧铰接点随上台板升降而水平移动,剪刀撑中心与上台板中心并不处于垂直位置,剪叉机械结构使升降台起升有较高的稳定性,承载运行起来非常平稳,支撑载荷受力简单,应力较低,折叠式节省了不少空间,可通过直流电机驱动剪叉式升降平台3;所述升降平台上方设置有转动平台4,所述转动平台4设置有步进电机一以及与步进电机一驱动连接的机械臂5,所述步进电机一驱动所述机械臂5转向运动;所述机械臂5包括主杆以及与主杆连接的电控伸缩杆,所述电控伸缩杆与步进电机二驱动连接,所述步进电机二驱动所述电控伸缩杆伸缩运动,所述电控伸缩杆的前端安装有摄像头6,即,所述摄像头6设置在所述机械臂5的末端;
28.如图2所示,所述控制柜2内设置有控制器12以及与控制器12电性连接的无线通信模块、两个直流电机驱动器、两个步进电机驱动器,两个直流电机驱动器包括直流电机驱动器一13和直流电机驱动器二14,并分别与左、右两侧的直流电机一和直流电机二电性连接,两个步进电机驱动器包括步进电机驱动器一15和步进电机驱动器二16,并分别与步进电机一、步进电机二电性连接,所述控制器12通过所述无线通信模块与遥控终端通信连接,所述摄像头6与所述控制器12电性连接。所述摄像头为360
°
的红外夜视摄像头。所述控制器12为单片机,型号为stm32f103zet6。
29.所述左驱动轮和右驱动轮的正上方分别设置有霍尔传感器,所述左驱动轮和右驱动轮上设置有小磁铁,两个所述霍尔传感器通过感应所述小磁铁对左驱动轮和右驱动轮的转速进行监测;两个所述霍尔传感器电性连接所述控制器12。
30.所述控制柜2上设置有应急电闸10,所述应急电闸10用于控制所述供电电池9的供电线路的通断。控制柜2外侧安装所述应急电闸10,其连接在供电线路上,对于装置在应急条件下进行断电处理。
31.所述控制器12与所述供电电池9之间设置有降压组件,用于将12v电压转5v电压,为单片机提供5v的标准电压。
32.所述无线通信模块包括信号接收天线和信号接收机,所述信号接收天线设置在所述控制柜2的顶端,所述信号接收机设置在所述控制柜2的内部,所述信号接收天线与所述信号接收机连接,所述信号接收机与所述控制器12电性连接。通过信号接收天线实现信号的传输,通过操控遥控终端,例如遥控器,来操控装置的运行。
33.所述装置还包括角度传感器,两个所述角度传感器设置在左驱动轮和右驱动轮
上,用于获取左驱动轮和右驱动轮的偏转角度,两个所述角度传感器电性连接所述控制器12。通过角度传感器采集到的角度信号的反馈,实现对驱动轮行走路径实时修改。
34.所述左驱动轮、右驱动轮、辅助轮7均安装有防滑轮胎。
35.所述装置及辅助支架均采用铝合金材料制造。
36.控制柜2内中心位置为控制器12,单片机为控制的核心,装置通过无线通信模块接收信号并对信号进行处理,生成pwm信号,改变电压来控制各个电机,实现装置前进、后退、左转、右转、停止、加速、减速、以及升降平台的升降与机械臂的转动等功能;采用霍尔传感器检测小车的速度,将小磁铁固定驱动轮的车轴的转盘上,小磁铁每次经过传感器,将产生一个脉冲信号,并将脉冲信号发送到单片机,通过相应算法求得小车的速度,将小车当前的运动状态和速度在遥控器显示器显示出来。
37.如图3所示,本实用新型提供的轮式遥控水产养殖信息获取装置的工作原理为:
38.步骤s1:遥控信号发出;
39.步骤s2:接收机接收遥控器发出的信号,传送至单片机;
40.步骤s3:单片机处理信号并执行指令;
41.步骤s4、s5:直流电机驱动器一与直流电机驱动器二分别与左右两侧的两个直流电机相连,驱动直流电机的运转;
42.步骤s8、s9:左右两侧的两个直流电机执行行走指令;
43.步骤s12、s13:控制左驱动轮和右驱动轮的运动;
44.步骤s14:同时控制升降平台的升降;
45.步骤s6、s7:步进电机驱动器一和步进电机驱动器二分别与步进电机一和步进电机二相连,驱动步进电机的运转;
46.步骤s10、s11:步进电机一和步进电机二分别控制机械臂的转动以及伸缩。
47.本实用新型提供的轮式遥控水产养殖信息获取装置,采用锂电池为电动机供能,相比于传统的燃油发动机,极大的降低了机械噪音,为信息采集提供了一个良好的环境;它的剪叉机械结构,使升降台起升有较高的稳定性;配备一键式紧急停止及意外失去电源的应急下降装置,提高了设备的安全性;通过单独的电机驱动左右轮,使得任何一个车轮受到地面冲击时不影响另一个轮子的正常运动,减少了车身受到的冲击力,提高了车轮对地面的附着力。
48.本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。