1.本实用新型涉及自动控制技术领域,具体的,涉及一种用于人工气道自动化管理的系统。
背景技术:
2.人工气道是为了保证气道通畅而在生理气道与其他气源之间建立的连接,分为上人工气道和下人工气道,是呼吸系统危重症患者常见的抢救措施之一。上人工气道包括口咽气道和鼻咽气道,下人工气道包括气管插管和气管切开等建立人工气道的目的是保持患者气道的通畅,有助于呼吸道分泌物的清除。人工气道的应用指征取决于患者呼吸、循环和中枢神经系统功能状况,结合患者的病情及治疗需要选择适当的人工气道。
3.人工气道是保障危重患者呼吸道畅通,机体供氧需求二氧化碳排出的重要措施,为实现人工气道的精确控制,目前市场上出现了人工气道自动管理装置,但是,人工气道自动管理装置放置在病房,医生或护士需要不定时到病房查看人工气道的工作情况。
技术实现要素:
4.本实用新型提出一种用于人工气道自动化管理的系统,解决了相关技术中人工气道管理智能化程度低的问题。
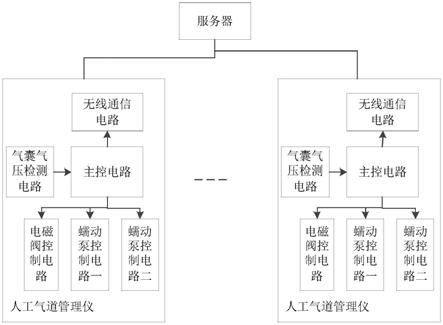
5.本实用新型的技术方案如下:包括多个均与服务器连接的人工气道管理仪,所述人工气道管理仪包括均与主控电路连接的无线通信电路、气囊气压检测电路、电磁阀控制电路、蠕动泵控制电路一和蠕动泵控制电路二,
6.所述无线通信电路用于与服务器通信连接,所述电磁阀控制电路用于与电磁阀的控制端连接,所述蠕动泵控制电路一用于与第一蠕动泵连接,所述蠕动泵控制电路二用于与第二蠕动泵连接,
7.所述蠕动泵控制电路一和所述蠕动泵控制电路二的电路结构相同,所述蠕动泵控制电路一包括依次连接的压控振荡器u2、脉冲分配器u3和功率放大电路,
8.所述压控振荡器u2的 vin端与外部电源vin连接,所述压控振荡器u2的
‑
vs端接地,所述压控振荡器u2的rt端依次通过电阻r8、电位器rp2接地,所述压控振荡器u2的logic
‑
common端通过电阻r9连接外部电源vin,所述压控振荡器u2的两个ct端之间连接电容c2,所述压控振荡器u2的fout端通过电阻r10连接电源vcc,
9.所述压控振荡器u2的fout端接入所述脉冲分配器u3的i/clk端,所述脉冲分配器u3的其中两个输入端与所述主控电路连接,所述脉冲分配器u3的输出端与功率放大电路的输入端连接,所述功率放大电路的输出端用于驱动蠕动泵。
10.进一步,所述脉冲分配器u3的两个输入端分别通过光耦隔离电路与所述主控电路连接,其中一路光耦隔离电路包括光耦合器u5,所述光耦合器u5的输入端与所述主控电路连接,所述光耦合器u5的输出端与所述脉冲分配器u3的一个输入端连接。
11.进一步,所述功率放大电路包括依次连接的三极管q2、光耦合器u8和mos管u9,所
述三极管q2的基极与所述脉冲分配器u3的输出端连接,所述mos管u9的输出端用于驱动蠕动泵。
12.进一步,所述气囊气压检测电路包括运放u1a、运放u1b和运放u1c,所述运放u1a的同相输入端用于与气压传感器的第一输出端连接,所述运放u1b的同相输入端用于与气压传感器的第二输出端连接,所述运放u1a的反相输入端和所述运放u1b的反相输入端之间连接有电位器rp1,所述运放u1a的输出端通过电阻r1连接至反相输入端,所述运放u1b的输出端通过电阻r2连接至反相输入端,
13.所述运放u1a的输出端通过电阻r3连接至所述运放u1c的反相输入端,所述运放u1b的输出端通过电阻r4连接至所述运放u1c的同相输入端,所述运放u1c的输出端通过电阻r5连接至反相输入端,所述运放u1c的同相输入端通过电阻r4接地,
14.所述运放u1c的输出端作为所述气囊气压检测电路的输出,接入所述主控电路。
15.进一步,所述电磁阀控制电路包括二极管d3和三极管q1,所述二极管d3的阳极与所述主控电路连接,所述二极管d3的阴极与所述三极管q1的基极连接,所述三极管q1的发射极接地,所述三极管q1的集电极与所述电磁阀控制线圈的一端连接,所述电磁阀控制线圈的另一端与电源vdd连接。
16.本实用新型的工作原理及有益效果为:
17.本实用新型中多个人工气道管理仪分别监测气囊压力、第一蠕动泵和第二蠕动泵的工作状态,并上传至服务器,通过将医生或护士的电脑与服务器连接,医生或护士通过电脑即可实时了解人工气道的监测数据,有利于提高人工气道管理的智能化程度。
18.其中,气囊压力检测电路用于实时检测气囊压力,当气囊内的压力高于设定值时,主控电路控制电磁阀打开,排出气囊中的一部分气体,当气囊内的压力低于设定值时,主控电路控制电磁阀打开,并通过气泵向气囊中充气,使气囊内气压保持在设定值;当需要排痰时,主控电路通过蠕动泵控制电路一启动第一蠕动泵,将积痰从引流管排出;同时,控制第二蠕动泵和第一蠕动泵配合,经生理盐水供应管注入生理盐水进行气囊上痰液的清洗。
19.蠕动泵控制电路的工作原理为:所述压控振荡器u2根据输入电压vin的不同输出对应频率的脉冲信号,压控振荡器u2输出的脉冲信号作为脉冲分配器u3的时钟输入,脉冲分配器u3根据该时钟输入信号、以及两个输入端接收的控制信号,输出控制脉冲,再经功率放大电路放大后控制蠕动泵的正反转和转速。其中,两个输入端接收的控制信号,一路是来自主控电路的起/停控制信号,另一路是来自主控电路的正/反转控制信号;电阻r9、电位器rp2和电容c2组成外部rc电路,用于调节压控振荡器u2的输出频率。
附图说明
20.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
21.图1为本实用新型电路原理框图;
22.图2为本实用新型中蠕动泵控制电路一电路原理图;
23.图3为本实用新型中功率放大电路原理图;
24.图4为本实用新型中气囊气压检测电路原理图;
25.图5为本实用新型中电磁阀控制电路原理图;
具体实施方式
26.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都涉及本实用新型保护的范围。
27.如图1
‑
图2所示,本实施例用于人工气道自动化管理的系统包括多个均与服务器连接的人工气道管理仪,人工气道管理仪包括均与主控电路连接的无线通信电路、气囊气压检测电路、电磁阀控制电路、蠕动泵控制电路一和蠕动泵控制电路二,
28.无线通信电路用于与服务器通信连接,电磁阀控制电路用于与电磁阀的控制端连接,蠕动泵控制电路一用于与第一蠕动泵连接,蠕动泵控制电路二用于与第二蠕动泵连接,
29.蠕动泵控制电路一和蠕动泵控制电路二的电路结构相同,蠕动泵控制电路一包括依次连接的压控振荡器u2、脉冲分配器u3和功率放大电路,
30.压控振荡器u2的 vin端与外部电源vin连接,压控振荡器u2的
‑
vs端接地,压控振荡器u2的rt端依次通过电阻r8、电位器rp2接地,压控振荡器u2的logic
‑
common端通过电阻r9连接外部电源vin,压控振荡器u2的两个ct端之间连接电容c2,压控振荡器u2的fout端通过电阻r10连接电源vcc,
31.压控振荡器u2的fout端接入脉冲分配器u3的i/clk端,脉冲分配器u3的其中两个输入端与主控电路连接,脉冲分配器u3的输出端与功率放大电路的输入端连接,功率放大电路的输出端用于驱动蠕动泵。
32.本实施例中多个人工气道管理仪分别监测气囊压力、第一蠕动泵和第二蠕动泵的工作状态,并上传至服务器,通过将医生或护士的电脑与服务器连接,医生或护士通过电脑即可实时了解人工气道的监测数据,有利于提高人工气道管理的智能化程度。
33.其中,气囊压力检测电路用于实时检测气囊压力,当气囊内的压力高于设定值时,主控电路控制电磁阀打开,排出气囊中的一部分气体,当气囊内的压力低于设定值时,主控电路控制电磁阀打开,并通过气泵向气囊中充气,使气囊内气压保持在设定值;当需要排痰时,主控电路通过蠕动泵控制电路一启动第一蠕动泵,将积痰从引流管排出;同时,控制第二蠕动泵和第一蠕动泵配合,经生理盐水供应管注入生理盐水进行气囊上痰液的清洗。
34.蠕动泵控制电路一的工作原理为:压控振荡器u2根据输入电压vin的不同输出对应频率的脉冲信号,压控振荡器u2输出的脉冲信号作为脉冲分配器u3的时钟输入,脉冲分配器u3根据该时钟输入信号、以及两个输入端接收的控制信号,输出控制脉冲,再经功率放大电路放大后控制蠕动泵的正反转和转速。其中,两个输入端接收的控制信号,一路是来自主控电路的起/停控制信号,另一路是来自主控电路的正/反转控制信号;电阻r9、电位器rp2和电容c2组成外部rc电路,用于调节压控振荡器u2的输出频率,进而调节脉冲分配器u3的输出频率,调节蠕动泵的转速。
35.进一步,如图2所示,脉冲分配器u3的两个输入端分别通过光耦隔离电路与主控电路连接,其中一路光耦隔离电路包括光耦合器u5,光耦合器u5的输入端与主控电路连接,光耦合器u5的输出端与脉冲分配器u3的一个输入端连接。
36.光耦合器u3实现了脉冲分配器u3和主控电路之间的电气隔离,避免外部干扰信号通过脉冲分配器进入主控电路,保证主控电路的可靠工作。
37.进一步,如图3所示,功率放大电路包括依次连接的三极管q2、光耦合器u8和mos管u9,三极管q2的基极与脉冲分配器u3的输出端连接,mos管u9的输出端用于驱动蠕动泵。
38.脉冲分配器u3的输出信号为小电流信号,该小电流信号依次经过三极管q2、mos管u9放大后,电流信号满足蠕动泵的驱动要求,可以实现对蠕动泵的可靠控制;光耦合器u8用于实现脉冲分配器和蠕动泵的电气隔离,避免蠕动泵侧的干扰信号进入脉冲分配器u3,保证脉冲分配器u3的可靠工作。
39.进一步,如图4所示,气囊气压检测电路包括运放u1a、运放u1b和运放u1c,运放u1a的同相输入端用于与气压传感器的第一输出端连接,运放u1b的同相输入端用于与气压传感器的第二输出端连接,运放u1a的反相输入端和运放u1b的反相输入端之间连接有电位器rp1,运放u1a的输出端通过电阻r1连接至反相输入端,运放u1b的输出端通过电阻r2连接至反相输入端,
40.运放u1a的输出端通过电阻r3连接至运放u1c的反相输入端,运放u1b的输出端通过电阻r4连接至运放u1c的同相输入端,运放u1c的输出端通过电阻r5连接至反相输入端,运放u1c的同相输入端通过电阻r4接地,
41.运放u1c的输出端作为气囊气压检测电路的输出,接入主控电路。
42.运放u1a和运放u1b组成差动放大电路,用于对气压传感器输出的差分信号进行放大,运放u1a的输出端和运放u1b的输出端再经运放u1c进行单端输出,接入主控电路的ad通道,保证主控电路对气压信号的准确读取。为保证气压信号放大的效果,电路为对称设置,电阻r1和电阻r2的阻值相同,电阻r3和电阻r4的阻值相同,电阻r5和电阻r6的阻值相同。
43.进一步,如图5所示,电磁阀控制电路包括二极管d3和三极管q1,二极管d3的阳极与主控电路连接,二极管d3的阴极与三极管q1的基极连接,三极管q1的发射极接地,三极管q1的集电极与电磁阀控制线圈的一端连接,电磁阀控制线圈的另一端与电源vdd连接。
44.当需要打开电磁阀时,主控电路输出控制信号到三极管q1的基极,三极管q1导通,电磁阀的控制线圈通电,电磁阀吸合。由于电磁阀的吸合电压很高、而吸合后维持吸合状态所需的电压很低,如果频繁吸合和断开电磁阀,将会导致电磁阀状态不稳定,因此,为了提高电磁阀控制的可靠性,本实例中在三极管q1的基极串联二极管d3,使得三极管q1的开启电压升高为0.7*2=1.4v,这样即使频繁吸合和断开电磁阀,也能保证其吸合状态和断开状态的稳定性。
45.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。