1.本实用新型属于标准六轴机器人拓展外部轴及机械结构相关技术领域,具体涉及一种新型高效自动九轴天轨。
背景技术:
2.六轴机器人也称关节手臂机器人或关节机械手臂,是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业,拥有五个或六个旋转轴,类似于人类的手臂,有很高的自由度,适合于几乎任何轨迹或角度的工作,可以自由编程,完成全自动化的工作。
3.现有的标准六轴机器人拓展外部轴技术存在以下问题:标准六轴机器人的工作覆盖范围较小,自由度虽高但却只能在很小的工作范围内使用不能在空间移动,一台机器人不能同时服务于多台设备。
技术实现要素:
4.本实用新型的目的在于提供一种新型高效自动九轴天轨,以解决上述背景技术中提出的六轴机器人工作覆盖范围较小不能同时服务多台设备的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种新型高效自动九轴天轨,包括x轴固定架和z轴固定套,所述x轴固定架的上端安装有z轴固定套,所述z轴固定套左侧的x轴固定架后端外壁上设置有y轴连接架,所述x轴固定架上设置有横梁,所述横梁的前端外壁上设置有电气桥架,所述横梁的下端右侧外壁上设置有立柱,所述立柱的前端外壁上设置有向下斜伸的斜撑杆,所述立柱的右端外壁上设置有扶手平台,所述y轴连接架上设置有y轴横杆,所述y轴横杆的一端和横梁固定连接,所述y轴横杆的前端左侧外壁上设置有底部安装板,所述底部安装板右侧的y轴横杆前端外壁上设置有防撞缓冲支架,所述防撞缓冲支架右侧的y轴横杆前端外壁上设置有风琴罩,所述风琴罩左端的y轴横杆前端外壁上有高精密线轨,所述风琴罩上侧的y轴横杆前端内部设置有拖链槽,所述z轴固定套上设置有z轴横梁板,所述z轴横梁板的一端和横梁固定连接,所述z轴横梁板的另一端外壁上设置有机器人底部安装架,所述z轴横梁板通过机器人底部安装架连接有标准六轴机器人,所述标准六轴机器人通过外部电源电性连接。
6.优选的,所述y轴横杆的左端外壁上设置有固定架,所述y轴横杆通过固定架和横梁固定连接。
7.优选的,所述横梁的上端外壁上设置有高精线轨,所述高精线轨一侧的横梁上端外壁上设置有精密齿条。
8.优选的,所述立柱共设置有三个,三个所述立柱均等距设置在横梁的下端外壁上,三个所述立柱的前端外壁上均设置有斜撑杆。
9.优选的,所述y轴横杆和z轴横梁板的前端外壁上均设置有高精密线轨,所述y轴横杆和z轴横梁板与传动装置固定连接。
10.优选的,所述y轴横杆的上端外壁上设置有连接架,所述拖链槽设置在连接架的前端内部。
11.与现有技术相比,本实用新型提供了一种新型高效自动九轴天轨,具备以下有益效果:
12.本实用新型通过设计一种新型高效自动九轴天轨,能够大幅延伸机器人的工作覆盖范围,一台机器人能够同时服务于多台设备,机器人在使用时能够在x轴、y轴和z轴的空间方向上进行移动,大幅提高了机器人的工作范围,显著减少实际需要使用的机器人数量,搭载外部轴电机和高精密减速机组成的驱动单元,可通过工业机器人示教器进行操作,可与机器人同时示教工作,可实现协调动作,重复定位精度
±
0.05mm,可根据需要确定行走距离(定制),在标准六轴机器人的基础上,额外拓展了三轴,解决了标准机器人臂展局限问题,可与其他自动化设备配合,自动化集成率高,重复生产精度高,提高生产合格率,显著减少实际需要使用的机器人数量,确保机器人的效能得到充分可靠发挥,实现客户自动化投资价值最大化。
附图说明
13.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制,在附图中:
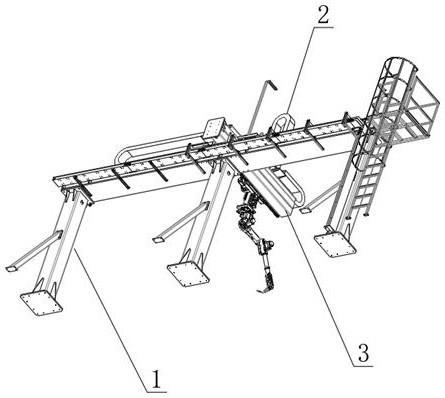
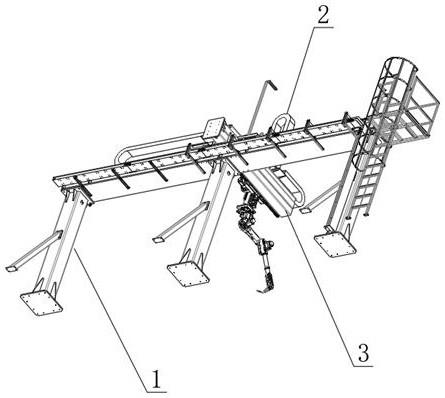
14.图1为本实用新型提出的一种新型高效自动九轴天轨立体结构示意图;
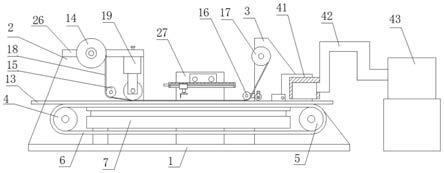
15.图2为本实用新型提出的一种新型高效自动九轴天轨正面结构示意图;
16.图3为本实用新型提出的一种新型高效自动九轴天轨侧面结构示意图;
17.图4为本实用新型提出的x轴固定架立体结构示意图;
18.图5为本实用新型提出的y轴连接架局部正面结构示意图;
19.图6为本实用新型提出的y轴连接架局部正面结构示意图
20.图中:1、x轴固定架;2、z轴固定套;3、y轴连接架;4、横梁;5、电气桥架;6、扶手平台;7、立柱;8、斜撑杆;9、y轴横杆;10、拖链槽;11、高精密线轨;12、风琴罩;13、防撞缓冲支架;14、底部安装板;15、标准六轴机器人;16、机器人底部安装架;17、z轴横梁板。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1
‑
6,本实用新型提供一种技术方案:一种新型高效自动九轴天轨,包括x轴固定架1和z轴固定套2,x轴固定架1的上端安装有z轴固定套2,z轴固定套2左侧的x轴固定架1后端外壁上设置有y轴连接架3,x轴固定架1上设置有横梁4,横梁4的前端外壁上设置有电气桥架5,横梁4的下端右侧外壁上设置有立柱7,立柱7的前端外壁上设置有向下斜伸的斜撑杆8,立柱7共设置有三个,三个立柱7均等距设置在横梁4的下端外壁上,三个立柱7的前端外壁上均设置有斜撑杆8,立柱7用于支撑整个天轨的重量,所以需要斜撑杆8进一步加固立柱7的支撑效果,立柱7的右端外壁上设置有扶手平台6,y轴连接架3上设置有y轴横
杆9,y轴横杆9的一端和横梁4固定连接,y轴横杆9的左端外壁上设置有固定架,y轴横杆9通过固定架和横梁4固定连接,横梁4的上端外壁上设置有高精线轨,高精线轨一侧的横梁4上端外壁上设置有精密齿条,横梁4通过高精线轨和精密齿条和y轴横杆9固定连接,使得y轴横杆9能够根据使用需要在横梁4上移动,通过固定架将y轴横杆9固定在横梁4上,使得机器人在x轴和y轴的方向都能够自由移动,y轴横杆9的前端左侧外壁上设置有底部安装板14,底部安装板14右侧的y轴横杆9前端外壁上设置有防撞缓冲支架13,防撞缓冲支架13右侧的y轴横杆9前端外壁上设置有风琴罩12。
23.一种新型高效自动九轴天轨,风琴罩12左端的y轴横杆9前端外壁上有高精密线轨11,风琴罩12上侧的y轴横杆9前端内部设置有拖链槽10,y轴横杆9的上端外壁上设置有连接架,拖链槽10设置在连接架的前端内部,z轴固定套2上设置有z轴横梁板17,z轴横梁板17的一端和横梁4固定连接,y轴横杆9和z轴横梁板17的前端外壁上均设置有高精密线轨11,y轴横杆9和z轴横梁板17与传动装置固定连接,通过高精密线轨11才能实现机器人在各个方向上的移动,z轴横梁板17的另一端外壁上设置有机器人底部安装架16,z轴横梁板17通过机器人底部安装架16连接有标准六轴机器人15,标准六轴机器人15通过外部电源电性连接。
24.本实用新型的工作原理及使用流程:本实用新型安装好过后,本新型高效自动九轴天轨的原理是搭载外部轴电机和高精密减速机组成的驱动单元,可实现x/y/z三个拓展外部轴空间位移,通过输入程序指令控制机器人的方向移动,可根据需要确定行走距离(定制),在标准六轴机器人15的基础上,额外拓展了三轴,解决了标准六轴机器人15臂展局限问题,在使用时,根据使用的移动需要将程序输入到操控系统中,即可控制标准六轴机器人15根据相应的指令进行x轴、y轴和z轴上的移动和自身翻转,通过伺服电机带动标准六轴机器人15移动,动力充足。
25.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。