1.本发明涉及空调技术领域,具体地说,是涉及一种检测电机失步的空调装置。
背景技术:
2.空调装置中,直流变频压缩机或直流变频风机的本体是永磁同步电机,虽然永磁同步电机较异步电机具有节能高效、噪音低,运转平稳等优良特性,但是永磁同步电机的运行必须使转子和定子保持同步,否则将会出现失步故障,导致压缩机或风机无能力输出,长时间将导致压缩机或风机磨损,发热直至损坏。而目前空调直流变频压缩机或直流变频风机一般采用无位置传感器控制方式,只能通过压缩机或风机电流、电压等通过无位置传感器算法来估算位置,保证其运转,而一旦出现失步,压缩机或风机电压、电流并没有多大异常,因而,通过压缩机或风机电压、电流估算的位置并没有太大影响,这样就导致失步故障无法检出,而失步运转时间较长时会烧毁电机。
技术实现要素:
3.本发明提供一种空调装置,解决了空调装置永磁同步电机失步故障无法检出的技术问题。
4.为达到上述目的,本发明采用如下技术方案:一种空调装置,包括永磁同步电机,所述空调装置还包括:电压获取模块,用于获取d轴电压vd和q轴电压vq;或者,用于获取直流母线的电压vdc;电流获取模块,用于获取d轴电流id和q轴电流iq;或者,用于获取直流母线的电流idc;电机转速估算模块,用于通过无位置传感器算法估算得到电机转速ω1;第一功率计算模块,用于根据所述d轴电压vd、q轴电压vq、d轴电流id和q轴电流iq计算第一功率p1;或者,用于根据所述直流母线的电压vdc和直流母线的电流idc计算第一功率p1;第二功率计算模块,用于根据所述电机转速ω1、d轴电流id、q轴电流iq、电机的d轴电感ld和q轴电感lq计算第二功率p2;控制模块,用于在满足失步关系:所述第一功率p1小于第二功率p2时判断所述电机失步。
5.一种空调装置,包括永磁同步电机,所述空调装置还包括:电压获取模块,用于获取d轴电压vd和q轴电压vq;或者,用于获取直流母线的电压vdc;电流获取模块,用于获取d轴电流id和q轴电流iq;或者,用于获取直流母线的电流idc;电机转速估算模块,用于通过无位置传感器算法估算得到电机转速ω1;
第一转矩计算模块,用于根据所述d轴电压vd、q轴电压vq、d轴电流id、q轴电流iq和电机转速ω1计算第一转矩t1;或者,用于根据所述直流母线的电压vdc、直流母线的电流idc和电机转矩ω1计算第一转矩t1;第二转矩计算模块,用于根据所述d轴电流id、q轴电流iq、电机的d轴电感ld和q轴电感lq计算第二转矩t2;控制模块,用于在满足失步关系:所述第一转矩t1小于第二转矩t2时判断所述电机失步。
6.本发明的技术方案相对现有技术具有如下技术效果:本发明空调装置的永磁同步电机发生失步时,实际的电机转子并没有旋转,而是处于一种来回摆动状态。此时,根据实际电压、电流计算的第一功率p1很小;而通过无位置传感器算法由电流、电压估算的位置还以为转子在旋转,进而估算的转速ω1不能反映转子的实际状态,因此,通过转速ω1计算出的第二功率p2不是实际的电机功率,而是大于此时的第一功率p1。因而,本发明通过第一功率p1和第二功率p2的关系即可判断电机是否失步,在不增加外部硬件电路的前提下,有效地检测出压缩机失步故障。
附图说明
7.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
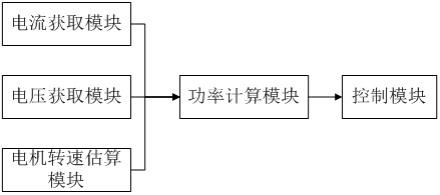
8.图1为本发明具体实施例1空调装置的原理框图。
9.图2为本发明具体实施例1的流程图。
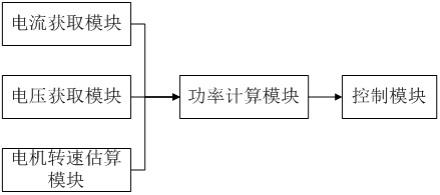
10.图3为本发明具体实施例2空调装置的原理框图。
11.图4为本发明具体实施例2的流程图。
具体实施方式
12.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
13.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。在上述实施方式的描述中,具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
14.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
15.实施例一一种空调装置,包括永磁同步电机,永磁同步电机可以驱动压缩机或者风机。
16.如图1所示,空调装置还包括电压获取模块、电流获取模块、电机转速估算模块、功率计算模块和控制模块。
17.下面对各个模块进行具体说明:电流获取模块,用于获取d轴电流id和q轴电流iq。具体的,通过电流传感器检测相电流ia、ib,将相电流ia、ib通过clark变换和park变换求得id、iq。
18.电压获取模块,用于获取d轴电压vd和q轴电压vq。vd和vq是由d、q轴电流pi调节输出计算得到。
19.电机转速估算模块,用于通过无位置传感器算法估算得到电机转速ω1。电机转速ω1是通过无位置传感器算法估算得到,无位置传感器算法较多,如滑模控制器,龙伯格,扩展反电动势、磁链观测等,都是通过电机模型推算,使用物理量为电机电压、电流、电阻、电感及反电动势常数等。本实施例不对电机转速ω1的估算方式进行限制保护,可采用现有技术即可。
20.第一功率计算模块,用于根据d轴电压vd、q轴电压vq、d轴电流id和q轴电流iq计算第一功率p1。
21.具体的,第一功率p1 = 3/2
×
pn
×
(vq
×
iq vd
×
id)
ꢀꢀ
式(1)。
22.其中,pn为电机极数。
23.第二功率计算模块,用于根据电机转速ω1、d轴电流id、q轴电流iq、电机的d轴电感ld和q轴电感lq计算第二功率p2。
24.具体的,第二功率p2= 3/2
×
pn
×
(ke
×
iq (ld
‑
lq)
ꢀ×
idiq)
×
ω1
ꢀꢀꢀ
式(2)。
25.其中,pn为电机极数,ke为电机的反电动势常数。
26.控制模块,用于在满足失步关系:第一功率p1小于第二功率p2时判断电机失步。
27.当永磁同步电机正常运转时,有p1=p2。即3/2
×
pn
×
(vq
×
iq vd
×
id) = 3/2
×
pn
×
(ke
×
iq (ld
‑
lq)
ꢀ×
idiq)
×
ω1 式(3)考虑到一定的误差,p1和p2在较小的误差范围内近似相等。
28.而当永磁同步电机发生失步时,实际的电机转子并没有旋转,而是处于一种来回摆动状态,此时根据实际电压、电流计算的功率p1很小。而此时通过无位置传感器算法由电流、电压估算的位置还是以为转子在旋转,进而估算的转速ω1不能反映转子的实际状态。由此,通过式(2)计算出的功率p2也不是实际的电机功率,而是大于失步时的功率p1。即永磁同步电机发生失步时,p2 > p1。
29.因而,将根据实际电压、电流计算的功率p1和通过估测的转速计算出的功率p2进行比较,两者之比或之差小于事先设定值时,即满足式(4)或式(5)时,即可判定为失步。
30.优选的,控制模块用于在第一功率p1和第二功率p2的关系满足p1
‑
p2≤perr式(4)时,判断电机失步,其中,perr<0;或者,控制模块用于在第一功率p1和第二功率p2的关系满足p1/p2≤prate式(5)时,判断电机失步,其中, prate<1。
31.由于不同的电机的功率不同,perr 和prate的设定值可以通过试验来设定为合适值。
32.为了进一步保证失步判断效果,避免误判,控制模块用于统计失步次数,在失步次
数大于设定值n时,判断电机失步。
33.具体的,控制模块用于在满足失步关系时,失步次数 1,否则失步次数
‑
1。其中,失步计数最小为0。
34.如图2所示,空调装置判断失步包括如下步骤:s1、开始。
35.s2、通过式(1)由实际电压、电流计算功率p1。
36.s3、通过式(2)由估测的转速计算出功率p2。
37.s4、判断是否满足式(3)或式(4),若是,进入步骤s5,否则,进入步骤s6。
38.s5、失步计数 1,进入步骤s7。
39.s6、失步计数
‑
1,进入步骤s2。
40.s7、判断失步计数>n,若是,进入步骤s8,否则,进入步骤s2。
41.s8、失步停机。
42.s9、结束。
43.当然,本实施例的第一功率p1为电机的实际功率也可以通过其他途径获取,例如,电流获取模块用于获取直流母线的电流idc;电压获取模块用于获取直流母线的电压vdc。
44.第一功率计算模块用于根据直流母线的电压vdc和直流母线的电流idc计算第一功率p1。
45.第一功率p1= vdc
×
idc。
46.实施例二一种空调装置,包括永磁同步电机,,永磁同步电机可以驱动压缩机或者风机。
47.如图3所示,空调装置还包括电压获取模块、电流获取模块、电机转速估算模块、转矩计算模块和控制模块。
48.下面对各个模块进行具体说明:电流获取模块,用于获取d轴电流id和q轴电流iq。具体的,通过电流传感器检测相电流ia、ib,将相电流ia、ib通过clark变换和park变换求得id、iq。
49.电压获取模块,用于获取d轴电压vd和q轴电压vq。vd和vq是由d、q轴电流pi调节输出计算得到。
50.电机转速估算模块,用于通过无位置传感器算法估算得到电机转速ω1。电机转速ω1是通过无位置传感器算法估算得到,无位置传感器算法较多,如滑模控制器,龙伯格,扩展反电动势、磁链观测等,都是通过电机模型推算,使用物理量为电机电压、电流、电阻、电感及反电动势常数等。本实施例不对电机转速ω1的估算方式进行限制保护,可采用现有技术即可。
51.第一转矩计算模块,用于根据d轴电压vd、q轴电压vq、d轴电流id、q轴电流iq和电机转速ω1计算第一转矩t1。
52.具体的,第一转矩t1 = 3/2
×
pn
×
(vq
×
iq vd
×
id) / ω1 式(6)。
53.其中,pn为电机极数。
54.第二转矩计算模块,用于根据d轴电流id、q轴电流iq、电机的d轴电感ld和q轴电感lq计算第二转矩t2。
55.具体的,第二转矩t2= 3/2
×
pn
×
(ke
×
iq (ld
‑
lq)
ꢀ×
idiq)
ꢀꢀ
式(6)。
56.其中,pn为电机极数,ke为电机的反电动势常数。
57.控制模块,用于在满足失步关系:第一转矩t1小于第二转矩t2时判断电机失步。
58.优选的,控制模块用于在第一转矩t1和第二转矩t2的关系满足t1
‑
t2≤terr 式(8)时,判断所述电机失步,其中,terr<0;或者,所述控制模块用于在所述第一转矩t1和第二转矩t2的关系满足t1/t2≤trate 式(9)时,判断所述电机失步,其中, trate<1。
59.为了进一步保证失步判断效果,避免误判,控制模块用于统计失步次数,在失步次数大于设定值n时,判断电机失步。
60.具体的,控制模块用于在满足失步关系时,失步次数 1,否则失步次数
‑
1。其中,失步计数最小为0。
61.如图4所示,空调装置判断失步包括如下步骤:s1、开始。
62.s2、通过式(6)由实际电压、电流计算转矩t1。
63.s3、通过式(7)由估测的转速计算出转矩t2。
64.s4、判断是否满足式(8)或式(9),若是,进入步骤s5,否则,进入步骤s6。
65.s5、失步计数 1,进入步骤s7。
66.s6、失步计数
‑
1,进入步骤s2。
67.s7、判断失步计数>n,若是,进入步骤s8,否则,进入步骤s2。
68.s8、失步停机。
69.s9、结束。
70.当然,本实施例的第一转矩t1为电机的实际转矩也可以通过其他途径获取,例如,电流获取模块用于获取直流母线的电流idc;电压获取模块用于获取直流母线的电压vdc。
71.第一转矩计算模块用于根据直流母线的电压vdc和直流母线的电流idc计算第一转矩t1。
72.第一转矩t1= vdc
×
idc / ω1。
73.以上仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。