1.本实用新型涉及飞行器技术领域,尤其涉及一种系留无人机的收放系统。
背景技术:
2.系留无人机是现今发展迅速的一种无人机。由于系留无人机的飞行和控制要求负载高电压和大电流,因此,大部分系留无人机本身并不配置有供电单元,或其供电单元的供电量非常小。通常,系留无人机依靠一或多根电缆与地面供电系统进行连接并依靠地面供电系统为其提供续航所需的电量。因此,系留无人机在飞行过程中总会拖拽着电缆,系留无人机也因此得名。
3.而系留无人机的收放技术是系留无人机技术的重要组成部分,对系留无人机的起降和停放保护等起着重要的保障作用。而现有技术中系留无人机的收放系统存在如下问题:
4.(一)收放舱装置无法保证系留无人机在运输过程中的稳定性,在颠簸路段极易导致系留无人机的晃动,甚至是磕碰,导致系留无人机的损坏的情况发生;
5.(二)线缆收放装置的绕线半径是固定不变,导致线缆收放装置无法适应不同直径的线缆,以及不同长度的线缆的收放,因此,需要根据不同直径或不同长度的线缆,更换线缆收放装置。
技术实现要素:
6.本实用新型所要解决的技术问题在于,提供一种系留无人机的收放系统,通过在升降平台上设置的卡锁结构,实现系留无人机的固定,避免了颠簸路段,系留无人机发生晃动磕碰的情况发生;通过将采用可调节绕线半径的绕线机构,使得线缆收放装置能够适应不同直径或不同长度的线缆的收放,以使得线缆收放装置能够实现通用化。
7.为了解决或者一定程度上改善上述技术问题,根据本实用新型一方面,提供了一种系留无人机的收放系统,包括:收放舱装置和线缆收放装置;
8.其中,所述收放舱装置包括:收放舱本体和升降平台;
9.所述升降平台可升降的设置于所述收放舱本体的容置空间内;
10.所述升降平台上设置有至少一个卡锁机构,以锁止停放在所述升降平台上的系留无人机;
11.所述线缆收放装置包括:绕线机构、驱动机构和导线机构;
12.所述驱动机构连接于所述绕线机构,以驱动所述绕线机构旋转,所述绕线机构的绕线半径可调节;
13.所述导线机构设置于所述绕线机构的一侧,线缆穿设于所述导线机构,并缠绕在所述绕线机构上。
14.在一些实施方式中,所述卡锁机构包括底座、第一连接杆、第二连接杆、压头和手柄;
15.其中,所述底座固定连接于所述升降平台上;
16.所述第一连接杆铰接于所述底座与所述手柄,第二连接杆的两端分别铰接于所述手柄和所述底座;
17.所述压头设置于所述第一连接杆的一端,用于压紧所述系留无人机。
18.在一些实施方式中,所述收放舱装置还包括:至少两个相对设置的升降机构,设置于所述收放舱本体的容置空间内;
19.所述升降机构包括:导轨、滑块、支架和第一驱动装置;
20.其中,所述导轨的一端固定连接于所述收放舱本体;
21.所述滑块连接于所述导轨,并可沿所述导轨的长度方向滑动;
22.所述支架连接于所述滑块,所述升降平台连接于所述支架;
23.所述第一驱动装置连接于所述滑块,以驱动所述滑块沿所述导轨的长度方向滑动。
24.在一些实施方式中,所述收放舱装置还包括弹性件,设置于所述升降平台和所述支架之间。
25.在一些实施方式中,所述收放舱装置还包括舱盖;
26.所述舱盖包括有舱盖本体、滑轨和第二驱动装置;
27.其中,所述滑轨固定连接于所述收放舱本体上;
28.所述舱盖本体可滑动的连接于所述滑轨上;
29.所述第二驱动装置连接于所述舱盖本体或所述滑轨,驱动所述舱盖本体沿所述滑轨滑动,以开启和闭合所述舱盖。
30.在一些实施方式中,所述绕线机构包括:两个绕线盘、两个锁定盘和多个绕线轴;
31.所述绕线盘上开设有多个由所述绕线盘的圆心向外延伸的弧形槽;
32.所述锁定盘分别设置于两个所述绕线盘的外侧,且可相对于所述绕线盘旋转;
33.所述锁定盘上开设有多个由所述锁定盘的圆心向外延伸的直线型槽;
34.所述绕线轴的两端分别依次穿设于所述弧形槽和所述直线型槽。
35.在一些实施方式中,所述绕线机构还包括中心转轴,两端分别依次穿设于所述绕线盘和所述锁定盘的圆心;
36.所述驱动机构连接于所述中心转轴,以通过驱动所述中心转轴旋转。
37.在一些实施方式中,所述绕线机构还包括锁定装置;
38.所述锁定装置包括:可伸缩的设置于所述锁定盘上的锁定销和多个沿所述绕线盘周向设置的锁定孔;
39.当所述锁定销伸入所述锁定孔时,所述锁定盘不可相对于所述绕线盘旋转;
40.当所述锁定销退出所述锁定孔时,所述锁定盘可相对于所述绕线盘旋转。
41.在一些实施方式中,所述导线机构包括有导杆和导线器;
42.所述导杆上设置有往复式螺纹,所述导线器通过螺纹件连接于所述导杆,以使得所述导线器可沿所述导杆往复运动。
43.在一些实施方式中,所述导杆连接于所述驱动机构或所述绕线机构,以使得所述绕线机构和所述导杆同步转动。
44.本实用新型与现有技术相比具有明显的优点和有益效果。借由上述技术方案,本
实用新型一种系留无人机的收放系统可达到相当的技术进步性及实用性,并具有产业上的广泛利用价值,其至少具有下列优点:
45.一、通过在升降平台上设置卡锁结构,在系留无人机停放在升降平台上时,通过卡锁机构锁定系留无人机的位置,使其在颠簸路段的运输过程中,不会发生晃动、碰撞的情况;
46.二、在系留无人机停放在升降平台的指定位置后,通过按压手柄,使得卡锁机构的压头压紧系留无人机的起落架,同时手柄与底座连接的两个铰接点与第一连接杆与手柄的铰接点处于同一直线,使得卡锁机构处于死点状态,能够防止在颠簸过程中,卡锁结构松动的情况发生;
47.三、在升降平台和升降机构的支架之间,设置弹性件,以在系留无人机降落时起到缓冲的作用,防止系留无人机硬着陆,避免对系留无人机的冲击;
48.四、通过将采用可调节绕线半径的绕线机构,使得线缆收放装置能够适应不同直径或不同长度的线缆的收放,以使得线缆收放装置能够实现通用化;
49.五、在锁定盘上设置直线型槽,在绕线盘上设置弧形槽,进而通过旋转锁定盘,即可驱动多个绕线轴沿着弧形槽同步移动,进而实现线缆收放装置的绕线半径的调节;
50.六、通过使得导线器沿导杆往复移动,使得在收取线缆时,能够将电缆均匀的缠绕在绕线机构上。
51.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
52.图1为本实用新型一实施例的系留无人机的收放系统的结构示意图;
53.图2为本实用新型另一实施例的系留无人机的收放系统的结构示意图;
54.图3为本实用新型一实施例的收放舱装置的局部放大结构示意图;
55.图4为本实用新型另一实施例的线缆收放装置的结构示意图;
56.图5为本实用新型一实施例的绕线机构的结构示意图;
57.图6为本实用新型一实施例的导杆的结构示意图。
58.【符号说明】
59.1:系留无人机;
60.2:收放舱装置;
61.20:收放舱本体;
62.21:升降平台;
63.210:线缆孔
64.22:卡锁机构;
65.220:底座;
66.221:第一连接杆;
67.222:压头;
68.223:手柄;
69.224:第一铰接点;
70.225:第二铰接点;
71.226:第三铰接点;
72.227:第四铰接点;
73.23:升降机构;
74.230:导轨;
75.231:滑块;
76.232:支架;
77.24:弹性件;
78.25:舱盖;
79.250:舱盖本体;
80.251:滑轨;
81.252:第二驱动装置;
82.3:线缆收放装置;
83.30:绕线机构;
84.300:绕线盘;
85.3000:弧形槽;
86.301:绕线轴;
87.302:锁定盘;
88.3020:直线型槽;
89.303:中心转轴;
90.304:锁定装置;
91.3040:锁定销;
92.3041:锁定孔;
93.31:驱动机构;
94.32:导线机构;
95.320:导杆;
96.321:导线器;
97.33:编码器;
98.34:扭矩传感器;
99.35:控制器;
100.4:线缆;
101.5:供电系统。
具体实施方式
102.为更进一步阐述本实用新型为达成预定实用新型目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本实用新型提出的一种系留无人机的收放系统的具体实施方式及其功效,详细说明如后。
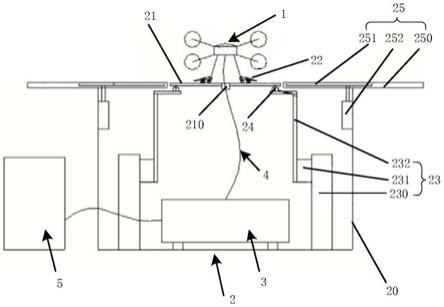
103.本实用新型实施例提供了一种系留无人机的收放系统。如图1所示,包括:收放舱
装置2和线缆收放装置3。
104.其中,收放舱装置2包括:收放舱本体20和升降平台21;升降平台 21可升降的设置于收放舱本体20的容置空间内;升降平台20上设置有至少一个卡锁机构22,以锁止停放在升降平台21上的系留无人机1;线缆收放装置3包括:绕线机构30、驱动机构31和导线机构32;驱动机构31连接于绕线机构30,以驱动绕线机构30旋转,绕线机构30的绕线半径可调节;导线机构32设置于绕线机构30的一侧,线缆4穿设于导线机构32,并缠绕在绕线机构30上。
105.在一实施例中,如图1和图2所示,升降平台21可升降的设置于收放舱本体20的容置空间内。如图1所示,在系留无人机1起飞或降落时,升降平台21升起至收放舱本体20的开口处,以便于系留无人机1的起飞或降落。在系留无人机1降落在升降平台21后,如图2所示,升降平台21 下降至收放舱本体20的容置空间内,以实现系留无人机1的回收及存放。
106.为了保证系留无人机1在运输过程中的稳定性,防止因路面颠簸导致的系留无人机1的晃动导致磕碰的情况出现。如图1和图2所示,在升降平台21上设置有至少一个卡锁机构22。在系留无人机1停靠在升降平台 21的指定位置后,通过该卡锁机构22锁紧系留无人机1,使其稳固的停放在升降平台21上。
107.在一实施例中,如图3所示,卡锁机构22包括有底座220,第一连接杆221、压头222和手柄223。
108.其中,底座220固定连接在升降平台21上,第一连接杆221和手柄223 均铰接于底座220上,第一连接杆221和手柄223铰接,压头222设置在第一连接杆221的一端。当驱动手柄223向下运动时,手柄223会驱动第一连接杆221设置有压头222的一端向下运动,进而使得压头222抵顶在系留无人机1上。
109.在一具体实施中,卡锁机构22还设置有第二连接杆(图中未示出),该第二连接杆的两端分别铰接于底座220和手柄223上,进而实现手柄223 与底座220之间的铰接。
110.具体地,如图3所示,第一连接杆221通过第一铰接点224铰接于底座220上,手柄223通过第二铰接点225铰接于第一连接杆221,第二连接杆的一端通过第三铰接点226铰接于手柄223上,第二连接杆的另一端通过第四铰接点227铰接于底座220上。当系留无人机1停放在升降平台21 的指定位置后,通过按压手柄223使得压头222抵顶于系留无人机1的起落架上,实现对无人机的固定。在手柄223向下按压时,第二铰接点225、第三铰接点226和第四铰接点227位于同一直线时,卡锁机构22处于死点状态,此时,在颠簸的路上时,系留无人机1作用在压头222上的向上的作用力无法使得卡锁机构22解锁,进而保证卡锁机构22锁止状态的稳定性。
111.在一实施例中,如图3所示,压头222上设置有弧形凹槽,该弧形凹槽与系留无人机1的起落架的形状相匹配,以保证对系留无人机1锁止的牢固性。
112.进一步地,压头222采用橡胶件制成,以防止压头222对系留无人机1 产生磨损的情况。
113.在一实施例中,如图1和图2所示,为了实现升降平台21的升降,系留无人机的收放系统2还包括有至少两个相对设置的升降机构23,该升降机构23设置在收放舱本体20的容置空间内,连接于升降平台21。
114.具体地,升降机构23包括导轨230、滑块231和支架232。其中,导轨230的一端固定
连接于收放舱本体20,更具体的是导轨230竖直设置,一端连接于收放舱本体20的底部。滑块231连接于该导轨230上,并可沿该导轨230的长度方向滑动。支架232则固定连接于该滑块231上,升降平台21连接于支架232上。进而通过升降机构23实现升降平台21的可升降。
115.进一步地,升降机构23还设置有第一驱动装置(图中未示出),该第一驱动装置连接于滑块231,以驱动该滑块231沿滑轨251的长度方向滑动。
116.优选地,该第一驱动装置为电机。
117.在一实施例中,收放舱本体20还设置有可滑动开启的舱盖25,以开启和闭合收放舱本体20。
118.进一步地,该舱盖25包括有舱盖本体250、滑轨251和第二驱动装置 252。其中,滑轨251固定安装在收放舱本体20的顶端,舱盖本体250可滑动的连接于滑轨251上。第二驱动装置252连接于舱盖本体250或滑轨 251,以驱动舱盖本体250沿滑动滑动,以实现舱盖25的开启和闭合。
119.优选地,该第二驱动装置252为电机。
120.在一实施例中,为了防止在系留无人机1降落在升降平台21时,因硬着陆造成冲击过大,导致系留无人机1的损坏的情况发生,在升降平台21 和支架232之间,还设置有弹性件24。
121.其中,该弹性件24可以是具备一定阻尼的减震器,也可以是弹簧、橡胶或硅胶等弹性件,本实用新型并不以此为限。
122.由于电缆会一直跟随着系留无人机1,所以为避免电缆的缠结和保证电缆具有正确的出线方向,升降平台21上还设置有线缆孔210和设置于该线缆孔210下方的导线器(图中未示出),电缆穿过线缆孔210和导线器并连接至系留无人机1。
123.优选地,电缆可为航空系留电缆,其包括两根合金导线和一根光纤线,其具有抗大拉力,柔软、可盘绕回收、抗高压和抗大电流的特性,单模光纤芯可用于通信。
124.进一步的,该收放舱装置2中还包括有在所述系留无人机1起飞、返航、悬停和随动时对系留无人机1进行定位的定位构件(图中未示出),该定位构件可使得系留无人机1停放于所述升降平台21的指定位置。在一优选的实施例中,该定位构件安装在收放舱本体20内。
125.进一步的,该定位构件包括差分gps定位器(图中未示出),其用于获取系留无人机1与所述升降平台21的相对位置信息,该信息包括升降平台21与中心定位坐标有关的数据,从而有助于控制系留无人机1精确地停降到升降平台21上。
126.在一实施例中,如图1所示,线缆收放装置3设置在收放舱装置2的内部空间中,其用于缠绕和释放线缆4。
127.如图4所示,线缆收放装置3包括绕线机构30、驱动机构31和导线机构32。
128.其中,驱动机构31连接于绕线机构30,以驱动绕线机构30旋转,通过绕线机构30的旋转实现对线缆4的收放。
129.在一实施例中,该驱动机构31可以为电机。更进一步地,该电机为步进电机。该电机通过皮带(图中未示出)连接于绕线机构30,以带动绕线机构30旋转。该电机还可以采用轴连接,来实现对绕线机构30的驱动,即电机的输出轴直接连接于绕线机构30,或者通过增加驱动轴(图中未示出)来连接于绕线机构30。本实用新型并不对驱动机构31与绕线机构30 的连接方式进行限定,能够实现驱动绕线机构30的旋转即可。
130.导线机构32设置在绕线机构30的一侧,线缆4穿设于导线机构32,并缠绕在绕线机构30上。通过导线机构32的设置,能够有效地防止线缆4 在收放的过程中,出现缠绕、打结的情况出现。
131.为了能够使得绕线机构30适应不同直径,不同长度的线缆3的收放,将绕线机构30的绕线半径设置为可调节。进而能够根据不同的直径或长度的线缆4来调节绕线机构30的绕线半径,提升线缆收放装置3的通用性。
132.在一实施例中,如图5所示,绕线机构30包括有两个相对设置的绕线盘300和多个绕线轴301。其中,绕线盘300上设置有多个弧形槽3000,该弧形槽3000由绕线盘300的圆心向外延伸。多个绕线轴301分别穿设于两个绕线盘300上设置的弧形槽3000内,且可以沿着弧形槽3000移动。
133.具体地,每一个绕线盘300上设置的弧形槽3000的数量与绕线轴301 的数量相同,每一个绕线轴301的两端,分别穿设于绕线盘300上设置的一个弧形槽3000内。
134.当多个绕线轴301同步沿着弧形槽3000由绕线盘300的圆心向外延伸的方向移动时,绕线机构30的绕线半径会增大;当多个绕线轴301同步沿着弧形槽3000朝向绕线盘300的圆心方向移动时,绕线机构30的绕线半径会变小。
135.在一实施例中,为了能够实现多个绕线轴301沿着弧形槽3000的同步移动,线缆收放装置3还设置有两个锁定盘302。两个锁定盘302分别设置在两个绕线盘300的外侧,并且锁定盘302可以相对于所述绕线盘300旋转。
136.在锁定盘302上开设有多个直线型槽3020,该多个直线型槽3020由锁定盘302的圆心向外延伸,直线型槽3020的数量与弧形槽3000和绕线轴 301的数量相同。绕线轴301的两端分别依次穿设于弧形槽3000和直线型槽3020。
137.通过上述设置,当通过外力旋转锁定盘302时,在锁定盘302的推动下,多个绕线轴301会沿着锁定盘302上的直线型槽3020和绕线盘300上设置的弧形槽3000同步移动,进而使得多个绕线轴301相对于绕线盘300 圆心的距离的调整,进而实现绕线机构30的绕线半径的调整。
138.在一实施例中,如图5所示,绕线机构30还包括有中心转轴303,该中心转轴303的两端依次穿设于绕线盘300和锁定盘302的圆心,通过该中心转轴303限定两个绕线盘300的间距。驱动机构31连接于该中心转轴303,以驱动该中心转轴303旋转,进而带动整个绕线机构30旋转。
139.在一实施例中,如图5所示,在通过旋转锁定盘302将绕线机构30的绕线半径进行调整后,为了防止在收放线的过程中绕线轴301的位置发生移动,导致绕线机构30的绕线半径发生变化,或者使得多个绕线轴301构成不规则的造型的问题。在绕线机构30上还设置有锁定装置304,通过该锁定装置304锁止锁定盘302和绕线盘300,使得锁定盘302不可相对于绕线盘300旋转,进而实现对多个绕线轴301的位置地限定,避免在收放线过程中,绕线轴301的位置发生移动的情况。
140.在一具体实施例中,如图5所示,锁定装置304包括有可伸缩的设置于锁定盘302上的锁定销3040和多个沿绕线盘300周向设置的锁定孔3041。
141.其中,可以在锁定盘302上设置通孔(图中未示出),锁定销3040穿设于该通孔上,以实现锁定销3040可伸缩的设置在锁定盘302上。当然,还可以在锁定销3040上套设一个弹
性件,使得锁定销3040在外力和弹性件的弹力的作用下,实现可伸缩的设置在锁定盘302上。
142.多个锁定孔3041均匀的沿着绕线盘300的周向设置,多个锁定孔3041 与绕线盘300的圆心的距离等于锁定销3040与锁定盘302圆心的距离。由此可以使得锁定销3040穿过锁定盘302伸入到锁定孔3041中。当锁定销 3040伸入锁定孔3041时,锁定盘302不可相对于绕线盘300旋转;当锁定销3040退出锁定孔3041时,锁定盘302可相对于绕线盘200旋转。
143.在一实施例中,导线机构32包括有导杆320和导线器321,导线器321 设置在导杆320上,并可沿导杆320的长度方向往复运动。
144.进一步地,如图6所示,导杆320上设置有往复式螺纹,导线器321 通过螺纹件连接于导杆320上。通过往复式螺纹的设置,在不改变导杆320 旋转方向的同时,能够实现导向器沿导杆320长度方向的往复运动。
145.在一种实施方式中,驱动机构31连接于导杆320,以驱动导杆320旋转。具体地,驱动机构31通过皮带连接于导杆320。
146.在另一种实施方式中,绕线机构30连接于导杆320,在绕线机构30旋转时,会带动导杆320进行旋转。
147.通过上述两种方式的实施,均能够使得导杆320与绕线机构30同步旋转,而通过导杆320的旋转驱动通过螺纹连接于导杆320的导线器321沿着导杆320往复运动。
148.在一些实施方式中,线缆收放装置3还包括:与中心转轴303同轴安装以用于检测绕线长度的编码器33、用于监测驱动机构31相对于绕线机构30产生的扭矩值的扭矩传感器24。优选的,绕线机构30、驱动机构31、编码器33和扭矩传感器34可一起同轴安装。
149.进一步的,线缆4可为航空系留电缆,其包括其包括绝缘外套,绝缘外套内设有一根光纤线和可用于负载高电压与大电流的电气导线,其具有抗大拉力,柔软、可盘绕回收、抗高压和抗大电流的特性,单模光纤芯可用于通信。优选的,该电气导线为两根合金导线。
150.进一步的,该线缆收放装置3还包括可与地面站通信的控制器35,控制器35与驱动机构31、编码器33和扭矩传感器34连接,以用于采集和发送收发绕线长度和扭矩值并控制线缆收放装置3的收放线缆4的动作。
151.更具体地,扭矩传感器34的一端连接至绕线机构30,另一端连接至驱动机构31,用以实时监测驱动机构31相对于绕线机构30产生的扭矩值,并将该数值提供给控制器35。当扭矩值过大且超过预定值时,说明系留无人机1的绕线速度过快,这导致线缆4承受的拉力过大或说明系留无人机1 正在受到极强外力,如风力的作用,此时应控制并调整线缆4的收放速度。
152.在一个实施例中,编码器33和扭矩传感器34采集的数据可通过,例如rs485接口或控制器35,传输至地面控制设备(例如是供电系统5),地面控制设备同时获取系留无人机1的状态数据,例如飞行数据和位置数据,并对这些数据进行综合计算获得控制数据,该控制数据会被反馈至线缆收放装置3的控制器35,来调整和控制收放线速度,进而配合系留无人机1的起飞和回落。
153.本实用新型的系留无人机的收放系统,通过在升降平台上设置卡锁结构,在系留无人机停放在升降平台上时,通过卡锁机构锁定系留无人机的位置,使其在颠簸路段的运输过程中,不会发生晃动、碰撞的情况;在系留无人机停放在升降平台的指定位置后,通过
按压手柄,使得卡锁机构的压头压紧系留无人机的起落架,同时手柄与底座连接的两个铰接点与第一连接杆与手柄的铰接点处于同一直线,使得卡锁机构处于死点状态,能够防止在颠簸过程中,卡锁结构松动的情况发生;在升降平台和升降机构的支架之间,设置弹性件,以在系留无人机降落时起到缓冲的作用,防止系留无人机硬着陆,避免对系留无人机的冲击;通过将采用可调节绕线半径的绕线机构,使得线缆收放装置能够适应不同直径或不同长度的线缆的收放,以使得线缆收放装置能够实现通用化;在锁定盘上设置直线型槽,在绕线盘上设置弧形槽,进而通过旋转锁定盘,即可驱动多个绕线轴沿着弧形槽同步移动,进而实现线缆收放装置的绕线半径的调节;通过使得导线器沿导杆往复移动,使得在收取线缆时,能够将电缆均匀的缠绕在绕线机构上。
154.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型已以较佳实施例揭露如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。