一种应用于3d成型加工的矩阵拍照设备及3d成型建模方法
技术领域
1.本发明涉及3d成型加工的矩阵拍照建模技术领域,具体涉及一种应用于3d成型加工的矩阵拍照设备及3d成型建模方法。
背景技术:
2.在现有技术中,给活动的小动物或体积较大的人进行建模时,需要人工多角度拍摄动物或者人多个角度的照片,在根据拍摄的照片进行3d建模,但是动物会动来动去,人也很难长时间保持同一个动作,且拍摄者也很难把控不同位置的拍摄的角度,导致建模时间长,且模型精度低,因此需要一种应用于3d成型加工的矩阵拍照设备及3d成型建模方法,能够获取动物或人在某一时刻全方位的多角度照片信息,提高建模精度。
技术实现要素:
3.有鉴于此,本发明要解决的问题是提供一种应用于3d成型加工的矩阵拍照设备及3d成型建模方法,能够获取动物或人在某一时刻全方位的多角度照片信息,提高建模精度。
4.为解决上述技术问题,本发明采用的技术方案是:
5.一种应用于3d成型加工的矩阵拍照设备及3d成型建模方法,包括有若干l形的多角度照相杆,所述多角度照相杆由下往上依次包括有竖直照相杆、倾斜照相杆和水平设置的横向调节杆,所述横向调节杆通过径向调节机构与径向调节圆盘连接,所述径向调节圆盘包括有安装圆盘,所述安装圆盘通过转动机构与顶面的调节圆盘活动连接;
6.所述径向调节机构包括有开设于安装圆盘侧壁上的伸缩槽,所述伸缩槽内安装横向调节杆,所述横向调节杆外侧螺纹套接有传动齿轮,所述调节圆盘底面固定安装有调节齿环,所述传动斜齿轮与调节斜齿环啮合。
7.进一步的,所述转动机构包括有第一轴承,所述第一轴承内孔内固定安装有支撑轴一端,另一端与调节圆盘固定连接,所述第一轴承外壁与安装圆盘固定连接。
8.进一步的,所述多角度照相杆上安装有若干照相固定机构,所述照相固定机构包括有用于安装照相设备的支撑板和用于安装支撑板的放置框;
9.所述支撑板水平安装于放置框内,所述支撑板包括有与放置框内壁圆弧卡接的角度杆,所述角度杆一端连接有用于调节支撑板倾斜角度的倾角调节机构。
10.进一步的,所述倾角调节机构包括有第一传动杆,所述第一传动杆的一端与角度杆传动连接,另一端固定连接有可反向自锁的第一涡轮蜗杆机构,所述第一涡轮蜗杆机构输出端固定连接有调节帽。
11.进一步的,所述竖直照相杆一端固定连接有滚动机构,另一端与倾斜照相杆螺纹固定连接。
12.进一步的,所述竖直照相杆底端固定连接有滚动机构,所述竖直照相杆包括有一端开口的上套管和下套管,所述放置框顶端和底端固定安装有上刻度杆和下刻度杆;
13.所述上刻度杆和下刻度杆分别套接于上套管和下套管内,所述上套管和下套管开
口处均活动安装有升降旋钮,所述上刻度杆和下刻度杆均与升降旋钮螺纹连接。
14.进一步的,所述支撑板包括有与角度杆固定连接的底板,所述底板顶面固定安装有顶板,所述底板与顶板之间形成有安装腔;
15.所述安装腔内活动安装有安装有固定件,所述固定件用于与照相设备固定连接的连接端伸出顶板设置,所述固定件的传动端外啮合有调节齿,所述调节齿部分伸出安装腔设置。
16.进一步的,所述倾斜照相杆为圆弧结构,所述倾斜照相杆上安装有倾斜固定角度的照相固定机构。
17.进一步的,所述调节圆盘侧壁设置有用于表示照相固定机构位置的竖直刻度,所述角度杆表面设置有用于表示照相设备倾斜角度的水平刻度。
18.进一步的,包括步骤一:调整好所有照相设备的摄像位置及角度后,对应获取所有照相设备同时获取的所有图像照片,并生成轨迹图像包;
19.步骤二:提取轨迹图像包内照片的图像特征,并生成轨迹特征包,将若干轨迹特征包依据sfm算法生成3d点云,依据3d点云生成三维模型;
20.所述轨迹特征包内包括相机拍摄信息,所述3d成型建模方法配置有轨迹校验策略,所述轨迹校验策略包括将若干所述照相设备的旋转中心相连生成校验曲线,依据所述校验曲线校验相机拍摄信息,如果校验曲线与拍摄轨迹的重合度大于第一阈值,则校验成功。
21.本发明具有的优点和积极效果是:
22.通过在安装圆盘侧壁上安装若干个l形状的多角度照相杆,多角度照相杆上安装有多个可调节倾斜角度的相机,可在同一个方向上获取物体不同角度的图片信息,多角度照相杆的顶端视频安装有横向调节杆,横向调节杆与安装圆盘的侧壁活动连接,使多角度照相杆与安装圆盘形成一个鸟笼形状,能够获取动物或人在某一时刻全方位的多角度照片信息,提高建模精度。
附图说明
23.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
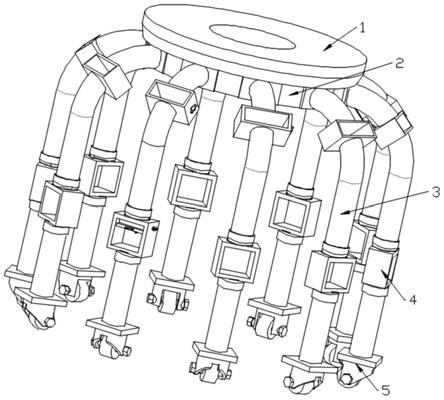
24.图1是本发明的一种应用于3d成型加工的矩阵拍照设备及3d成型建模方法的整体结构图;
25.图2是本发明的一种应用于3d成型加工的矩阵拍照设备及3d成型建模方法的主剖视图;
26.图3是本发明的一种应用于3d成型加工的矩阵拍照设备及3d成型建模方法的径向调节机构放大结构示意图;
27.图4是本发明的一种应用于3d成型加工的矩阵拍照设备及3d成型建模方法的转动机构的放大示意图;
28.图5是图2中的a处放大结构示意图;
29.图6是本发明的一种应用于3d成型加工的矩阵拍照设备及3d成型建模方法的左视图;
30.图7是图6中b处的放大结构示意图;
31.图中:1、调节圆盘;101、调节齿环;2、安装圆盘;3、多角度照相杆; 301、横向调节杆;302、倾斜照相杆;303、竖直照相杆;3031、上套管; 3032、下套管;304、升降旋钮;4、照相固定机构;401、放置框;4011、上刻度杆;4012、下刻度杆;402、支撑板;4021、角度杆;4022、底板; 4023、顶板;4024、固定件;4025、调节齿;5、滚动机构;6、径向调节机构;601、传动齿轮;602、第二轴承;7、转动机构;701、第一轴承;702、支撑轴;8、倾角调节机构;801、第一传动杆;802、第一涡轮蜗杆机构; 803、调节帽。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
34.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
35.本发明提供一种应用于3d成型加工的矩阵拍照设备及3d成型建模方法,如图1和图2所示,包括有若干l形的多角度照相杆3,多角度照相杆 3由下往上依次包括有竖直照相杆303、倾斜照相杆302和水平设置的横向调节杆301,竖直照相杆303上安装有用于固定安装照相设备的照相固定机构4,照相设备包括有相机。通过照相固定机构4将照相设备固定安装在竖直照相杆303上,方便相机在水平方向上拍摄物体。倾斜照相杆302为九十度圆弧结构,并在倾斜照相杆302的中段位置处固定安装照相固定机构4,倾斜照相杆302上的照相固定机构4倾斜设置,优选的倾斜角度为向下倾斜四十五度。安装在倾斜照相杆302上的相机也倾斜放置,倾斜照相杆302上的这个角度适用于拍摄物体顶面有大量复杂结构物体的建模。
36.如图5和图7所示,照相固定机构4包括有用于固定照相设备的支撑板 402,支撑板402活动安装在放置框401内。放置框401的顶端和底端均固定安装有上刻度杆4011和下刻度杆4012,竖直照相杆303包括有一端开口的上套管3031和下套管3032。将相机固定机构安装在竖直照相杆303上时,只需将上刻度杆4011和下刻度杆4012分别套接到上套管3031和下套管 3032内即可。
37.上套管3031和下套管3032开口处均活动安装有升降旋钮304,且上刻度杆4011和下刻度杆4012均与升降旋钮304螺纹连接,可通过升降旋钮304 调节照相固定机构4的位置。若调节竖直照相杆303上照相固定机构4高度时,可转动下套管3032内上的升降旋钮
304;若调节倾斜照相杆302上照相固定机构4高度时,可转动上套管3031上的升降螺纹。
38.上刻度杆4011和下刻度杆4012的长度方向上均设置有伸长刻度,伸长刻度用于表示上刻度杆4011和下刻度杆4012的伸出长度,可根据上刻度杆 4011和下刻度杆4012的数值,确定照相固定机构4的高度,进而预估摄像头的高度。
39.横向调节杆301通过径向调节机构86与径向调节圆盘1连接,将若干个多角度照相杆3圆形排布在径向调节圆盘1下方,使径向调节圆盘1与多角度照相杆3构成一鸟笼形状,径向调节圆盘1连接有用于调节横向调节杆 301的配合长度,进而控制鸟笼的直径,方便在矩阵拍照设备内拍摄不同大小的物体。
40.如图4所示,径向调节圆盘1包括有安装圆盘2,安装圆盘2通过转动机构7与顶面的调节圆盘1活动连接。转动机构7包括有固定安装在安装圆盘2顶面的第一轴承701,第一轴承701内孔内固定安装有支撑轴702一端,支撑轴702的另一端与调节圆盘1固定连接。使安装圆盘2与调节圆盘1之间可以自由的相对转动。优选的,支撑轴702可选用能够承受较大轴向力的圆锥滚子轴承。
41.如图3所示,径向调节机构6包括有开设在安装圆盘2侧壁上的多个伸缩槽,伸缩槽沿着安装圆盘2的半径方向开设,横向调节杆301活动安装在伸缩槽内,进而将多角度照相杆3圆形排布在安装圆盘2外侧,并形成鸟笼形状。同时在横向调节杆301的外侧螺纹套接有传动齿轮601,传动齿轮601 通过第二轴承602与伸缩槽侧壁活动连接,使传动齿轮601可以自由的在横向调节杆301上转动;调节圆盘1底面同轴固定安装有调节齿环101,且传动齿轮601与调节齿环101啮合,可通过转动调节圆盘1,调节圆盘1通过调节齿环101使传动齿轮601转动,改变传动齿轮601与横向调节杆301的旋和长度,进而改变矩阵拍照设备的直径。使矩阵拍照设备在不影响拍摄清晰度的前提下,可以给不同大小的物体拍摄,保证建模的精度。
42.调节圆盘1的侧壁上设置有竖直刻度,竖直刻度包括有两组数值,该两组数值分别表示竖直照相杆303和倾斜照相杆302上照相固定机构4的距离矩阵拍照设备轴线的位置,也就是照相固定机构4围成圆的半径。
43.竖直照相杆303的底端固定连接有滚动机构5,优选的,滚动机构5可选用万向轮。在调节矩阵拍照设备的半径时,方便多个多角度照相杆3同时径向移动,同时也方便矩阵拍照设备的搬运和整体移动。竖直照相杆303的的顶端螺纹固定连接有倾斜照相杆302,且螺纹槽在竖直照相杆303的顶端,使得倾斜照相杆302能够直接与升降旋钮304旋和,增大矩阵拍照设备内部空间的变化跨度。
44.如图5所示,支撑板402水平安装于放置框401内,支撑板402包括有与放置框401内壁圆弧卡接的角度杆4021,角度杆4021固定连接有底板 4022,底板4022顶面固定安装有顶板4023,底板4022与顶板4023之间形成有安装腔;安装腔内活动安装有安装有固定件4024,固定件4024的连接端伸出顶板4023设置,固定件4024的连接端用于与照相设备固定连接。固定件4024的传动端外啮合有调节齿4025,调节齿4025活动卡接在安装腔内,调节齿4025部分伸出安装腔设置,方便在支撑板402外转动调节齿4025,并使固定件4024的连接端转动,连接端与拍照设备旋和,进而将拍照设备固定在顶板4023的顶面。
45.角度杆4021一端传动连接有倾角调节机构8,倾角调节机构8用于调节支撑板402倾斜角度,进而调节照相机构的拍摄角度,角度杆4021表面设置有水平刻度,水平刻度用于
显示照相设备倾斜角度。
46.如图6和图7所示,调节机构8包括有第一传动杆801,第一传动杆801 的一端与角度杆4021传动连接,另一端固定连接有可反向自锁的第一涡轮蜗杆机构802,第一涡轮蜗杆机构802的输出端固定连接有调节帽803。调节照相机构的角度时,转动调节帽803,调节帽803通过第一涡轮蜗杆机构802使第一传动杆801转动,第一传动杆801带动角度杆4021转动,进而改变支撑板402的倾角,实现照相设备角度的调节。
47.第一涡轮蜗杆机构802的反向自锁为:第一涡轮蜗杆机构802可被调节帽803带动,改变照相设备的角度,但当照相设备角度确定后,因为第一涡轮蜗杆机构802有反向自锁性能,角度杆4021不能带动第一涡轮蜗杆机构 802,使照相设备的倾角固定。
48.使用矩阵拍照设备的3d成型建模方法(下面的矩阵拍照设备用鸟笼表示),以给狗建模为例:正向转动调节圆盘1,调节齿4025环101使传动齿轮601转动,横向调节杆301伸出伸缩槽,多角度照相杆3沿着调节圆盘1 的半径方向移动,增大多角度照相杆3之间的距离,方便狗从多角度照相杆 3之间进入到鸟笼内,狗进入到鸟笼后,反向转动调节圆盘1,调节多角度照相杆3到狗的距离,全面清晰的拍摄狗不同角度的图片。
49.多角度照相杆3的位置确定后,转动上套管3031和下套管3032,调节竖直照相杆303和倾斜照相杆302上照相固定机构4的高度,(也可以在狗进入鸟笼之前大致粗调一下,在狗进入到鸟笼后,根据相机显示屏上的图像在细调即可)。确定鸟笼的大小后,转动调节帽803,调节照相固定机构4 上相机的倾角,使相机能够拍摄到更多狗的细节,提高建模的精度。相机的倾角确定后放开调节帽803,相机柜固定在该位置不动作。使用鸟笼获取到鸟笼内狗某一时刻的多角度图片信息后,使用sfm算法生成3d模型,可使用该3d模型可制作狗狗玩偶或挂件。
50.3d成型建模的过程包括有步骤一:调整好所有照相设备的摄像位置及角度后,对应获取所有照相设备同时获取的所有图像照片,并生成轨迹图像包;轨迹图像包内包括相机拍摄信息,相机拍摄信息包括有相机的拍摄高度 (根据照相固定机构4的高度估算)、相机拍摄时的倾角(角度杆4021上所对应水平刻度值)和相机处在的位置,(相机的位置包括有相机的角度和距矩阵拍照设备的围成圆的半径:距矩阵拍照设备的围成圆的半径由调节圆盘1的侧壁对应的竖直刻度值确定。相机角度由人为自行确定,确定某一多角度照相杆3位零角度端,在顺序确定其余角度杆4021的角度即可)
51.步骤二:提取轨迹图像包内照片的图像特征,并生成轨迹特征包。具体的,首先分别提取若干图像中的焦距信息,然后利用sift特征提取算法提取图像特征,用kd
‑
tree模型计算两张图片特征点之间的欧式距离进行特征点的匹配,从而找到特征点匹配个数达到要求的图像对,然后对于每一个图像匹配对,形成图像轨迹,计算对极几何,根据对极几何形成相机拍摄信息确定轨迹上两张图像之间的内在射影关系。
52.在将若干轨迹特征包依据sfm算法生成3d点云,3d成型建模方法配置有轨迹校验策略,轨迹校验策略包括将若干相机拍摄信息的拍摄高度、倾角和位置生成校验曲线,轨迹校验策略依据校验曲线校验3d点云,如果校验曲线与拍摄轨迹的重合度大于第一阈值,则校验成功,依据生成的3d点云生成三维模型。若重合度小于第一阈值,将拍摄轨迹误差最大处使用校验曲线进行局部替换,替换完成后再次进行校验,直到校验成功,在依据新生成的3d点云生成三维模型,在提高三维模型精准度的前提下,还缩短了建模时间。
53.以上对本发明的实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明范围所作的均等变化与改进等,均应仍归属于本专利涵盖范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。