1.本发明涉及深空探测器工程监视技术领域,具体地,涉及一种火星探测器在轨全貌展示方法。
背景技术:
2.深空探测是指利用人造航天器对地球、月球以远的天体实施的探测活动。与近地航天探测任务相比,深空探测任务具有技术难度相对高、任务周期长、飞行过程复杂等特点,每一项深空探测任务都兼具科学、技术、经济等多方面的重大意义。如何做好工程任务的监测与展示、提升公众的参与认识是深空探测任务设计与实施中的重要工作。对于航天任务,设备资源需求少,意味着任务成本小。如何采用轻小型设备及可靠性操作实现较好的工程监测效果,是深空探测工程可视化监视及展示任务设计面临的难题。
3.随着光学监测相机的技术发展,微型化、轻量化光学监测相机在深空探测领域中逐渐开始广泛应用。在国外多项火星探测任务中,采用了光学成像技术获取火星探测器的工程状态、实施天体拍摄、科学探测。针对于火星探测器本体的工程展示,通常以关键部位如太阳翼、大口径天线、发动机等为对象。如果能实现火星探测器在轨飞行全貌展示,将大大提升任务的工程展示度。
4.专利文献为cn101520590b的发明专利公开了一种相机及其自拍方法,通过增加移动侦测模块、侦测是否有移动物体闯入待拍场景,提高自拍成功率。该发明的主要用途在于提高自拍成功率。
5.专利文献为cn103124327b的发明专利公开了一种用于摄像机自拍拍摄的方法和装置,采用了第一输入、第二输入确认方式实现摄像机自拍拍摄。解决的问题是提升用户使用摄像机的便利性,降低自拍用户操作对自拍拍照成功率的影响。
6.专利文献为cn105890577b的发明专利公开了一种适用于深空探测器在轨多个天体合影成像方法。基于相机性能参数建立的视场模型耦合天体和探测器轨道动力学模型等其他参数,确定多天体成像具体策略、得到成像效果仿真图。解决的是深空探测器在轨进行多天体合影任务设计问题。
7.专利文献为cn111355899a的发明专利公开了一种太空全景成像系统及成像方法。根据太空全景成像的特点,采用一个控制器去控制多个相机同步曝光;同时根据卫星的姿态确定主相机,根据卫星的速度、高度、以及主相机的焦距信息,控制主相机的最大曝光时间限制,利用主相机的曝光时间去控制其他相机的曝光时间,使得所有相机同步曝光,实现同步拍摄工作,最终重构天体目标的全景图像,解决了现有技术难以拼接成全景图像和图像模糊的问题。
8.但是上述方案无法实现较高的工作展示。
技术实现要素:
9.针对现有技术中的缺陷,本发明的目的是提供一种火星探测器在轨全貌展示方
法。
10.根据本发明提供的一种火星探测器在轨全貌展示方法,包括如下步骤:
11.步骤s1:地面上行发送全貌展示相机自检指令,火星探测器响应相应指令,进行全貌相机自检;
12.步骤s2:地面对全貌展示相机自检动作相关的遥测信息、图像信息进行判断,确认自检过程状态是否正常,若判断为正常,则进入步骤s3;若判断为异常,则需判断是否对全貌展示相机进行重启及再次自检,若判断结果为是,则转入步骤s1,若判断结果为否,则转入异常分支;
13.步骤s3:调高全貌展示相机温控阈值,将全貌展示相机的温度提升至分离前设计的温度范围;
14.步骤s4:根据设计的全貌展示成像场景需求,对火星探测器姿态进行调整;
15.步骤s5:全貌展示相机加电进行成像状态设置;
16.步骤s6:根据状态遥测确认全貌展示相机设置情况是否正常;若判断为正常,则转步骤s7;若判断为异常,则需判断是否对全貌展示相机进行重启及成像状态再次设置,若判断结果为是,则转入步骤s5,若判断结果为否,则转入异常分支;
17.步骤s7:全貌展示相机转内部供电;
18.步骤s8:根据状态遥测确认全貌展示相机转内部供电执行情况是否正常;若判断为正常,则转步骤s9;若判断为异常,则判断是否补发全貌展示相机转内电设置,若判断结果为是,则转入步骤s7,若判断结果为否,则转入异常分支;
19.步骤s9:全貌展示相机与平台分离;
20.步骤s10:根据状态遥测确认全貌展示相机与平台分离情况是否正常;若判断为正常,转入步骤s11;若判断为异常,则判断是否紧急补发全貌展示相机分离指令,若判断结果为是,则转入步骤s9,若判断结果为否,则转入异常分支;
21.步骤s11:将全貌展示相机拍摄的图像点播回传至地面;
22.步骤s12:地面对全貌展示图像数据进行处理,生成全貌展示影像图。
23.优选地,所述全貌展示相机采用可分离式全貌展示相机。
24.优选地,全貌展示相机、工程展示标志均安装在火星探测器的舱外,并且当全貌展示相机分离后,工程展示标志位于全貌展示相机的视场内。
25.优选地,全貌展示相机与火星探测器分离前低温控运行,全貌展示相机升温后分离火星探测器。
26.优选地,全貌展示相机包括用于图像采集的图像采集模块、用于内部供电的电源模块以及用于无线通信的通信模块。
27.优选地,全貌展示相机与火星探测分离后,通过无线通信方式将图像信息回传至火星探测器。
28.优选地,全貌展示相机与火星探测器之间的相对分离速度为0.1m/s至0.3m/s。
29.优选地,全貌展示相机的分离解锁、分离前的外部供电及温控由火星探测器实施。
30.优选地,当决定紧急实施补发分离执行时,单次补救处置时间短于全貌展示相机内电预计消耗完毕的时间,并留出全貌展示相机实施标称拍照所需的电量。
31.优选地,步骤s2、步骤s6、步骤s8、步骤s10中,异常状态处理只进行一次。
32.与现有技术相比,本发明具有如下的有益效果:
33.1、本发明提出了一种采用分离式全貌展示相机获取火星探测器在轨全貌影像的方法;全貌展示相机与火星探测器平台分离后,在逐渐远离的过程中,持续对火星探测器本体进行拍照并回传图像数据,从而获取火星探测器在轨飞行状态全貌在一段时间内的持续拍摄;
34.2、本发明所述全貌展示相机采用最简配设计,具备图像采集、内部供电、无线通信等最低配功能,分离解锁、分离前的外部供电及温控由火星探测器平台实施,从而降低全貌展示相机的资源需求。
35.3、本发明设计了一套全貌展示任务实施流程,包含状态自检与确认、正式任务实施两阶段,设计了各阶段故障入口及处理策略,可有效获取火星探测器在轨全貌影像,该实施策略可广泛用于分离式监测任务,极具工程参考意义、可实施性极强。
36.4、本发明采用轻小型分离式全貌展示相机与探测器分离后对探测器本体进行全貌成像,设计了全貌展示任务实施流程。该方法可获取火星探测器在轨全貌影像,从而实现较高的工程任务展示。
附图说明
37.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
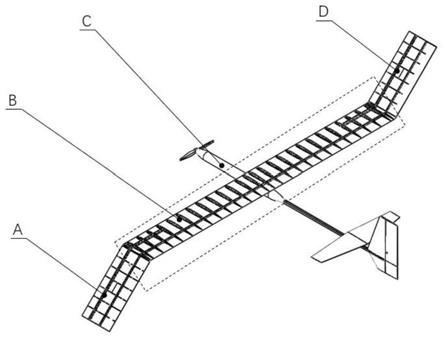
38.图1为本发明的全貌展示相机在火星探测器平台上的安装示意图;
39.图2为本发明的全貌展示相机与火星探测器平台分离后实施全貌展示任务的示意图;
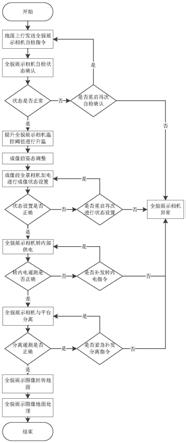
40.图3为本发明的全貌展示任务实施策略流程。
具体实施方式
41.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
42.如图1所示,根据本发明提供的一种火星探测器在轨全貌展示方法及实施策略,所述全貌展示方法包括:采用轻小型分离式全貌展示相机,全貌展示相机与火星探测器分离后,在远离过程中对火星探测器进行全貌成像;全貌展示相机采用最简配设计,具备图像采集、内部供电、无线通信等最低配功能;全貌展示相机的分离解锁、分离前的外部供电及温控由火星探测器实施。一套全貌展示任务实施流程,包含状态自检及正式任务实施两阶段,设计了各阶段故障入口及处理策略。
43.所述全貌展示任务实施流程包含如下步骤:(一)地面上行自检指令进行全貌相机自检;(二)地面对全貌展示相机自检的遥测信息、图像信息进行判断,确认自检过程状态是否正常;若异常,抉择是否对全貌展示相机进行重启及再次自检;(三)调高全貌展示相机温控阈值;(四)视成像场景需求,对火星探测器姿态进行调整;(五)全貌展示相机加电进行成像状态设置;(六)根据状态遥测确认全貌展示相机设置情况;若异常,抉择是否对全貌展示
相机进行重启及成像状态再次设置;(七)全貌展示相机转内部供电;(八)根据状态遥测确认全貌展示相机转内部供电执行情况;若异常,抉择是否补发全貌展示相机转内电设置;(九)全貌展示相机与平台分离;(十)根据状态遥测确认全貌展示相机与平台分离情况;若异常,抉择是否紧急补发全貌展示相机转内电设置;(十一)将全貌展示相机拍摄的图像点播回传至地面;(十二)地面对全貌展示图像数据进行处理,生成全貌展示影像图。
44.进一步的,全貌展示相机与平台分离前采用低温控策略,降低相机所需的温控平均功耗。全貌展示相机与火星探测分离后,通过无线通信方式将图像信息回传至火星探测器。全貌展示相机与火星探测器之间的相对分离速度为0.1m/s至0.3m/s,以保证全貌展示相机对火星探测器的拍摄时间尽可能长。在全貌展示任务实施流程中的判断环节,当判断异常时,需进行决策是否重新实施上一步骤的动作,若决定不实施,则转入异常分支。在全貌展示任务实施流程中判断异常后,原则上仅进行一次异常状态补救处理。在全貌展示任务实施流程中,全貌展示相机与平台分离情况判断环节需尽快完成,以保证实施紧急补救措施的时间裕度;决定紧急实施补发分离执行时,需保证单次补救处置时间短于全貌展示相机内电预计消耗完毕的时间,并留出全貌展示相机实施标称拍照所需的电量。
45.更为详细的说明,本发明涉及一种火星探测器在轨全貌展示方法及实施策略,能够通过分离式全貌展示相机获得火星探测器在轨飞行全貌影像,给出了一种具有工程参考意义的全貌展示任务实施策略。如图1和图2所示,火星探测器在轨全貌展示方法及实施策略,包括:火星探测器1、全貌展示相机2、工程展示标志3。全貌展示相机2、工程展示标志3,均安装在火星探测器1的舱外,两者的布局需保证全貌展示相机2分离后工程展示标志3位于全貌展示相机2视场内。如图2所示,全貌展示相机2与火星探测器1分离后,在逐渐远离的过程中,持续对火星探测器1进行拍照,并回传图像数据。
46.本发明包括如下步骤:
47.步骤一:地面上行发送全貌展示相机自检指令,火星探测器响应相应指令,进行全貌相机自检;
48.步骤二:地面对全貌展示相机自检动作相关的遥测信息、图像信息进行判断,确认自检过程状态是否正常;若正常,转步骤三;若异常,需抉择是否对全貌展示相机进行重启及再次自检,若决定实施则转入步骤一,否则转入异常分支;原则上,仅进行一次异常状态处理;
49.步骤三:调高全貌展示相机温控阈值,将全貌展示相机的温度提升至分离前设计的温度范围;
50.步骤四:根据设计的全貌展示成像场景需求,对火星探测器姿态进行调整,以保证拍摄区域位于光照区;
51.步骤五:全貌展示相机加电进行成像状态设置;
52.步骤六:根据状态遥测确认全貌展示相机设置情况;若正常,转步骤七;若异常,需抉择是否对全貌展示相机进行重启及成像状态再次设置,若决定实施则转入步骤五,否则转入异常分支;原则上,仅进行一次异常状态处理;
53.步骤七:全貌展示相机转内部供电;
54.步骤八:根据状态遥测确认全貌展示相机转内部供电执行情况;若正常,转步骤九;若异常,需抉择是否补发全貌展示相机转内电设置,若决定实施则转入步骤七,否则转
入异常分支;原则上,仅进行一次异常状态处理;
55.步骤九:全貌展示相机与探测器平台分离;
56.步骤十:根据状态遥测确认全貌展示相机与探测器平台分离情况;若正常,转入步骤十一;若异常,则抉择是否紧急补发全貌展示相机分离指令,若决定实施则转入步骤九,否则转入异常分支;原则上,仅进行一次异常状态处理;
57.步骤十一:将全貌展示相机拍摄的图像点播回传至地面;
58.步骤十二:地面对全貌展示图像数据进行处理,生成全貌展示影像图。
59.综上所述,提出了采用轻小型可分离式全貌展示相机与探测器分离后对探测器本体进行成像,实现火星探测器在轨飞行全貌影像获取;轻小型可分离式全貌展示相机采用最简配置设计以降低资源需求;设计了一套全貌展示任务实施流程,包含状态自检与确认、正式任务实施两阶段,给出了各阶段故障入口及处理策略;该全貌展示方法及实施策略可广泛用于分离式监测任务,极具工程参考意义、可实施性极强。
60.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
61.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。