1.本发明是有关于一种光电检测系统与检测晶粒方法,特别是应用于检测led的光电检测系统与检测晶粒方法。
背景技术:
2.发光二极管(light emitting diode,led)具有如省电、寿命长、响应速度快等特点,且随着led的制程也不断精进,可将led晶粒体积(尺寸)降低,使得晶圆上所能承载的led晶粒越多,可应用如作为显示面板的像素(pixel)。
3.对于切割后的晶圆,由于在晶圆上的led的相对位置未尽相同,为了有效掌控每一颗led的光特性,现有技术会对一片晶圆上的每一颗led逐一进行点测,以判断出晶圆上的每一颗led的优劣程度。然而,逐一单颗检测led的方式时间上过于冗长,若led的数量越多,则要检测完一片晶圆的时程就越久,成为生产流程瓶颈,如此对于要大量生产晶圆的工厂来说,除了不利于整体生产周期时间,也影响后续制程管制评估的时间;再者,若要对多颗led同时进行检测,由于切割后各led的相对位置已不如原本尚未切割前的排列,致使要对多颗切割后的led同时供电是有机械对位上的技术困难。
4.因此,如何改良并能提供一种『光电检测系统与检测晶粒方法』来避免上述所遭遇到的问题,是业界所待解决的课题。
技术实现要素:
5.本发明提供一种光电检测系统与检测晶粒方法,对位过程中可同时对针尖及led晶粒的焊垫进行取像,并寻求媒合各探针的一最佳扎针位置,使得区域内的led晶粒的电性较为均匀。
6.本发明的一实施例提供一种光电检测系统,包括一检测载台、一探针卡、一影像撷取模块以及一分析模块。检测载台连接于一运动模块。检测载台的一侧能承载一载体,载体上设有多个led晶粒,每一led晶粒设有两个焊垫,且载体定义有至少一欲检测区域,每一焊垫定义有一位置参考点。探针卡连接于运动模块。探针卡包括一探针基板、多个探针以及一穿透孔,穿透孔贯穿于探针基板,各探针连接于探针基板,而各探针具有一针尖,且穿透孔能暴露出各针尖与欲检测区域内的多个焊垫。影像撷取模块连接于运动模块,运动模块可依据一水平位置信息而控制影像撷取模块、探针卡及检测载台的一水平相对位置,并使各针尖能对应位于欲检测区域内的焊垫,且使得影像撷取模块能透过穿透孔对多个针尖及其对应的焊垫进行影像撷取而得一欲检测影像信息,欲检测影像信息包含对应多个针尖的一针尖信息及对应欲检测区域内该多个焊垫的一欲检测焊垫信息。分析模块连接影像撷取模块,分析模块分析针尖信息及欲检测焊垫信息而计算出各针尖相对其所对应焊垫的位置参考点的一水平偏移量,且分析模块依据各水平偏移量而计算出一水平容许值,再将水平容许值结合水平位置信息而决定一扎针水平位置信息。运动模块连接分析模块,运动模块依据扎针水平位置信息而调整探针卡与检测载台的水平相对位置后,再依据一垂直位置信息
而控制探针卡与检测载台的一垂直相对位置,以使各针尖能电性接触其所对应的焊垫。
7.在一实施例中,上述载体尚定义至少一待检测区域。穿透孔暴露出欲检测区域与待检测区域内的多个焊垫。影像撷取模块能透过穿透孔对欲检测区域与待检测区域内的多个焊垫进行影像撷取,使得欲检测影像信息更包括对应检测区域内的多个焊垫的一待检测焊垫信息,且分析模块能分析待检测焊垫信息。
8.在一实施例中,上述光电检测系统更包括一电性检测模块,电性检测模块电性连接多个探针,且电性检测模块受控于分析模块。
9.在一实施例中,上述光电检测系统更包括一光学检测模块,光学检测模块设置于检测载台的另一侧而能接收并分析多个led晶粒所发出的光信号。
10.在一实施例中,上述运动模块能驱动该检测载台相对该探针卡进行多轴运动,以控制影像撷取模块、探针卡及检测载台的水平相对位置及垂直相对位置。
11.本发明的一实施例另提供一种检测晶粒方法,包括以下步骤:提供设有多个led晶粒的载体于检测载台,每一led晶粒设有两个焊垫,且该载体定义有至少一欲检测区域,每一焊垫定义有位置参考点;执行水平位置控制,运动模块依据水平位置信息而控制影像撷取模块、探针卡及检测载台的水平相对位置,其中探针卡包括一探针基板、多个探针以及穿透孔,穿透孔贯穿于探针基板,各探针连接于探针基板,而各该探针具有一针尖,且穿透孔能暴露出各针尖与欲检测区域内的多个焊垫,并使各针尖能对应位于欲检测区域内的焊垫;执行影像撷取,影像撷取模块能透过穿透孔对多个针尖及其对应的焊垫进行影像撷取而得欲检测影像信息,欲检测影像信息包含对应该多个针尖的针尖信息及对应欲检测区域内多个焊垫的欲检测焊垫信息;分析位置信息,由一分析模块分析针尖信息及欲检测焊垫信息而计算出各针尖相对其所对应焊垫的位置参考点的一水平偏移量,且分析模块依据各水平偏移量而计算出一水平容许值,再将水平容许值结合水平位置信息而决定一扎针水平位置信息;以及执行扎针作业,运动模块依据扎针水平位置信息而调整探针卡与该检测载台的该水平相对位置后,再依据一垂直位置信息而控制探针卡与检测载台的一垂直相对位置,以使各针尖能电性接触其所对应的焊垫。
12.在一实施例中,所述分析位置信息的步骤中,载体尚定义至少一待检测区域,穿透孔暴露出欲检测区域与待检测区域内的多个焊垫。影像撷取模块能透过穿透孔对欲检测区域与待检测区域内的多个焊垫进行影像撷取,使得欲检测影像信息尚包括对应待检测区域内的多个焊垫的一待检测焊垫信息,且分析模块能分析待检测焊垫信息。
13.在一实施例中,上述检测晶粒方法中,更包括以下步骤:一电性检测步骤。电性检测模块电性连接多个探针,且电性检测模块受控于分析模块,于所述执行扎针作业的步骤后,电性检测模块能对多个led晶粒进行电性检测。
14.在一实施例中,上述检测晶粒方法中,更包括以下步骤:一光学检测步骤。光学检测模块设置于检测载台的另一侧,且光学检测模块受控于分析模块,于所述执行扎针作业的步骤后,光学检测模块能接收并分析多个led晶粒所发出的光信号。
15.在一实施例中,上述运动模块能驱动检测载台相对探针卡进行多轴运动,以控制影像撷取模块、探针卡及检测载台的水平相对位置及垂直相对位置。
16.基于上述,在本发明的光电检测系统与检测晶粒方法中,可同时对一区域内的多个led晶粒进行检测,并于扎针之前,透过探针卡的穿透孔来对针尖及多个led晶粒的焊垫
进行取像,以调整针尖与焊垫的位置。
17.再者,本发明可通过计算每个针尖与其对应焊垫的水平偏移量,并寻求媒合各探针的一最佳扎针位置,使各针尖相对于焊垫的位置均位于容许范围之内,使得区域内的led晶粒的电性较为均匀。
18.此外,由于本发明可有效且精准控制扎针量测位置,也有助于后续进行光电性量测的检测效率。
19.为让本发明能更明显易懂,下文特举实施例,并配合所附图式作详细说明如下。
附图说明
20.图1为本发明的光电检测系统一实施例的示意图。
21.图2为本发明的探针卡与载体一实施例的示意图。
22.图3为本发明的探针卡与载体另一实施例的示意图。
23.图4a为本发明的光电检测系统一实施态样的示意图。
24.图4b为本发明的分析模块一实施态样的示意图。
25.图5为本发明的光电检测系统另一实施例的示意图。
26.图6为本发明的光电检测系统又一实施例的示意图。
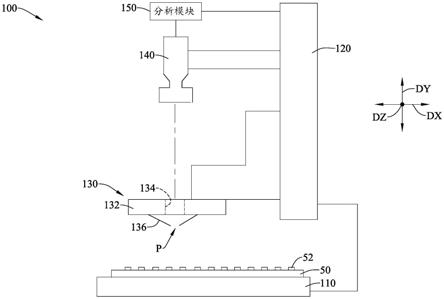
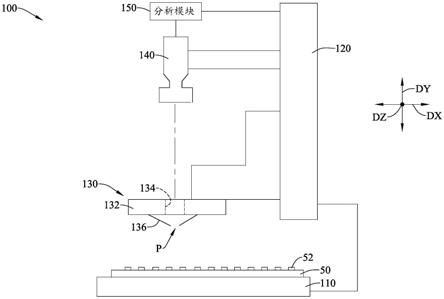
27.图7为本发明的检测晶粒方法的流程图。
28.附图标记说明:100,200,300-光电检测系统;110-检测载台;120-运动模块;130-探针卡;132-探针基板;134-穿透孔;136,136a,136b-探针;140-影像撷取模块;150-分析模块;260-电性检测模块;370-光学检测模块;50-载体;52-led晶粒;524,526-焊垫;dx-第一方向;dy-第二方向;dz-第三方向;g1-欲检测区域;g2-待检测区域;md-欲检测影像信息;md1,md11,md12,md1n-针尖信息;md2,md21,md22,md2n-欲检测焊垫信息;mx-水平位置信息;my-垂直位置信息;p1,p2,p3-水平相对位置;p,pt1,pt2-针尖;pf1,pf2-位置参考点;px-扎针水平位置信息;sx1,sx2,sxn-水平偏移量;tx-水平容许值;s100-检测晶粒方法;s110~s150-步骤。
具体实施方式
29.以下结合附图和实施例,对本发明的具体实施方式作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此限制本发明的保护范围。
30.为了说明上的便利和明确,图式中各元件的厚度或尺寸,以夸张或省略或概略的方式表示,以供熟悉此技艺的人士了解与阅读,且各元件的尺寸并未完全为其实际的尺寸,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均仍应落在本案所揭示的技术内容涵盖的范围内。
31.图1为本发明的光电检测系统一实施例的示意图。请参阅图1。本实施例的光电检测系统100包括一检测载台110、一探针卡130、一影像撷取模块140以及一分析模块150。检测载台110的一侧能承载一载体50,载体50上设有多个led晶粒52。探针卡130、检测载台110与影像撷取模块140三者之间具有一相对位置关系,如图1,探针卡130位于检测载台110与影像撷取模块140之间,分析模块150连接影像撷取模块140。
32.此外,检测载台110、探针卡130、影像撷取模块140分别连接于一运动模块120,运动模块120能驱动检测载台110相对探针卡130进行多轴运动(multi-axis motion),以控制影像撷取模块140的水平相对位置及垂直相对位置、探针卡130的水平相对位置及垂直相对位置及检测载台110的水平相对位置及垂直相对位置,其中所述多轴运动为沿着第一方向dx、第二方向dy、第三方向dz的任一方向移动、或绕着第一方向dx、第二方向dy、第三方向dz的任一方向转动、又或第一方向dx、第二方向dy、第三方向dz任一方向组合的运动方向。举例而言,控制探针卡130的水平相对位置及检测载台110的水平相对位置是使探针卡130沿着第一方向dx相对于检测载台110移动,控制探针卡130的垂直相对位置及检测载台110的垂直相对位置是使探针卡130沿着第二方向dy相对于检测载台110移动,即探针卡130朝检测载台110的方向移动或远离检测载台110的方向移动。于其他实施例中,运动模块120可驱动探针卡130相对检测载台110进行多轴运动,或者运动模块120可驱动探针卡130与检测载台110同时相互进行多轴运动。
33.在本实施例中,探针卡130包括一探针基板132、一穿透孔134以及多个探针136。探针基板132例如为一具厚度的板体,穿透孔134贯穿于探针基板132,即在探针基板132的厚度方向(如图1中的第二方向dy)上挖孔形成穿透孔134,穿透孔134的尺寸并未限制,端视所欲检测的载体50上的led晶粒52的范围而可调整。多个探针136连接于探针基板132,而每个探针136的一端连接探针基板132,探针136的另一端具有一针尖p,针尖p探针136远离探针基板132的一端,且穿透孔134能暴露出每个针尖p。又,在其他实施例中,穿透孔134亦可只暴露局部的多个针尖p。
34.图2为本发明的探针卡与载体一实施例的示意图。请参阅图1与图2,其中图2显示为经切割后的载体50(如晶圆)一部分,在载体50上的led晶粒52的相对位置未尽相同,这些每一个led晶粒52设有两个焊垫524、526,焊垫524定义有一位置参考点pf1、焊垫526定义有一位置参考点pf2。载体50定义有欲检测区域g1,所述欲检测区域g1可依据探针卡130中的探针136数量与范围而界定,如图2所示,欲检测区域g1范围内有四颗led晶粒52作为举例,然本发明不对此加以限制,在其他实施例中,欲检测区域g1可为两个、三个等,欲检测区域g1内的led晶粒52可为多个数量。
35.在本实施例中,运动模块120可依据水平位置信息而控制影像撷取模块140的水平相对位置、探针卡130的水平相对位置及检测载台110的水平相对位置,如图2所示,使得探针136a的针尖pt1能在水平方向对应位于欲检测区域g1内的焊垫524,探针136b的针尖pt2能在水平方向对应位于欲检测区域g1内的焊垫526,且探针卡130中的穿透孔134能暴露出如图2的针尖pt1、pt2与欲检测区域g1内的焊垫524、526,此时载体50上的各个led晶粒52的相对位置未尽相同,而这些探针136依预订的间距而设置于探针基板132上,其相对led晶粒52的排列态样而言,各探针136之间的相对位置是固定不变的,故针尖pt1、pt2分别对应到的焊垫524、526的位置也未尽相同,使得针尖pt1、pt2与其对应的焊垫524的位置参考点pf1、pf2会有不同的水平偏移量。
36.然,本发明不对此加以限制,图3为本发明的探针卡与载体另一实施例的示意图。请参阅图1与图3,需说明的是,图3的载体50、探针卡130中的探针基板132与图2的载体50、探针卡130中的探针基板132相似,其中相同的构件以相同的标号表示且具有相同的功能而不再重复说明,以下仅说明差异处:图3中的载体50尚定义待检测区域g2,其中欲检测区域
g1正要进行检测led晶粒52的区域,待检测区域g2则是下一次要检测led晶粒52的区域,欲检测区域g1与待检测区域g2可依据探针卡130中的探针136数量与范围而界定,如图3所示,欲检测区域g1、待检测区域g2范围内各有四颗led晶粒52作为举例,然本发明不对此加以限制,在其他实施例中,欲检测区域g1、待检测区域g2可为两个、三个等,欲检测区域g1、待检测区域g2内的led晶粒52可为多个数量,当然,穿透孔134的尺寸涵盖欲检测区域g1与待检测区域g2,以利影像撷取模块140进行取像。
37.图4a为本发明的光电检测系统一实施态样的示意图。图4b为本发明的分析模块一实施态样的示意图。请参阅图1、图2、图4a与图4b。水平位置信息mx与垂直位置信息my传输至运动模块120,运动模块120依据水平位置信息mx与垂直位置信息my可控制影像撷取模块140的水平相对位置及垂直相对位置、探针卡130及检测载台110的水平相对位置及垂直相对位置。举例而言,运动模块120可依据水平位置信息mx而控制影像撷取模块140的水平相对位置p1、探针卡130的水平相对位置p2及检测载台110的水平相对位置p3,使每个探针(如探针136a、136b)的针尖(如针尖pt1、pt2)能对应位于欲检测区域g1内的焊垫(如焊垫524、526)。影像撷取模块140例如可为电荷耦合装置(ccd)或互补金属氧化物半导体(cmos)技术制造的影像传感器ccd,由于探针卡130中的穿透孔134能暴露出探针(如探针136a、136b)的针尖(如针尖pt1、pt2)与其对应位于欲检测区域g1内的焊垫(如焊垫524、526),使得影像撷取模块140能透过穿透孔134对这些针尖(如针尖pt1、pt2)及其对应的焊垫(如焊垫524、526)进行影像撷取而得一欲检测影像信息md,欲检测影像信息md包含一针尖信息md1以及欲检测焊垫信息md2,其中针尖信息md1对应多个针尖(如针尖pt1、pt2),欲检测焊垫信息md2对应欲检测区域g1内多个焊垫(如焊垫524、526)。分析模块150接收来自影像撷取模块140传输的针尖信息md1及欲检测焊垫信息md2。
38.在本实施例中,分析模块150可通过硬件(例如集成电路)、软件(例如处理器执行的程序指令)或其组合来实现。分析模块150分析针尖信息md1及欲检测焊垫信息md2而计算出针尖(如针尖pt1、pt2)相对其所对应焊垫(如焊垫524、526)的位置参考点(如位置参考点pf1、pf2)的一水平偏移量,以图2为例,探针136a的针尖pt1相对其所对应焊垫524的位置参考点pf1的水平偏移量,计算针尖pt1的位置(如x坐标)与焊垫524的位置参考点pf1的位置(如x坐标)在水平方向(如图1的第一方向dx或第二方向dy)上差异。
39.以图4b为例,探针136例如具有n个探针与其对应的焊垫,针尖信息md11代表第一支探针,欲检测焊垫信息md21代表第一支探针对应位于欲检测区域g1内的焊垫;针尖信息md12代表第二支探针,欲检测焊垫信息md22代表第二支探针对应位于欲检测区域g1内的焊垫;同理,针尖信息md1n代表第n支探针,欲检测焊垫信息md2n代表第n支探针对应位于欲检测区域g1内的焊垫。分析模块150分析第一支探针的针尖信息md11以及对应焊垫的欲检测焊垫信息md21,计算出第一支探针相对其所对应焊垫的位置参考点的水平偏移量sx1;分析模块150分析第二支探针的针尖信息md12以及对应焊垫的欲检测焊垫信息md22,计算出第二支探针相对其所对应焊垫的位置参考点的水平偏移量sx2;同理,分析模块150分析第n支探针的针尖信息md1n以及对应焊垫的欲检测焊垫信息md2n,计算出第n支探针相对其所对应焊垫的位置参考点的水平偏移量sxn。
40.接着,分析模块150依据各水平偏移量sx1、sx2、sxn等,而计算出水平容许值tx,在此所谓水平容许值tx,并非是将每一支探针的针尖全部移动至其所对应焊垫的位置参考
点,而是分析模块150依据水平偏移量sx1、sx2、sxn等数值,调整该探针卡130进而整体调整该欲检测区域g1内的这些探针与其对应的焊垫的水平偏移量,使得这些水平偏移量能在一可容许的范围内,例如水平偏移量sx1为10单位、水平偏移量sx2为1单位、水平偏移量sxn为3单位,计算出水平容许值tx例如为5单位,让这些水平偏移量sx1、sx2、sxn均能调降至水平容许值tx以下,例如:经调整后,水平偏移量sx1由10单位变为5单位、水平偏移量sx2由1单位变为负4单位、水平偏移量sxn由3单位变为负2单位。接着,再将水平容许值tx结合水平位置信息mx而决定一扎针水平位置信息px。运动模块120接收分析模块150所输送的扎针水平位置信息px,运动模块120依据扎针水平位置信息px而调整探针卡130与检测载台110的水平相对位置后,再依据垂直位置信息my而控制探针卡130与检测载台110的垂直相对位置,以使各针尖能电性接触其所对应的焊垫。
41.在本实施例中,于对位过程中可同时对探针的针尖及led晶粒的焊垫进行取像,并寻求媒合各探针的一最佳扎针位置,使得区域(如欲检测区域g1)内的led晶粒52的电性较为均匀。
42.在其他实施例中,配合参阅图3与图1,穿透孔134暴露出欲检测区域g1与待检测区域g2内的多个焊垫524、526,影像撷取模块140能透过穿透孔134对欲检测区域g1与待检测区域g2内的多个焊垫524、526进行影像撷取,使得欲检测影像信息md更包括对应待检测区域g1内的多个焊垫524、526的待检测焊垫信息,且分析模块150能分析待检测焊垫信息,其分析步骤类同上述,在此不重复赘述。
43.图5为本发明的光电检测系统另一实施例的示意图。请参阅图5。需说明的是,图5的光电检测系统200与图1的光电检测系统100相似,其中相同的构件以相同的标号表示且具有相同的功能而不再重复说明,以下仅说明差异处:图5的光电检测系统200更包括一电性检测模块260。电性检测模块260电性连接探针卡130中的多个探针136,且电性检测模块260受控于分析模块150。当各针尖p能电性接触其所对应的焊垫时,电性检测模块260可对焊垫进行电性检测,亦即通过调整探针卡130的水平位置,进而减小各个水平偏移量(如图4b的水平偏移量sx1、sx2、sxn)相互之间的差异量,因此可同时对多个led晶粒52进行电性检测,而有益于检测工时,并可兼顾各探针136与其所对应焊垫的水平偏移量,避免这些探针136中某一探针136的水平偏移量过大,这些探针136中某一个探针136的水平偏移量很小,导致扎针位置不佳而影响电性检测的结果。
44.图6为本发明的光电检测系统又一实施例的示意图。请参阅图6。需说明的是,图6的光电检测系统300与图1的光电检测系统100相似,其中相同的构件以相同的标号表示且具有相同的功能而不再重复说明,以下仅说明差异处:图6的光电检测系统300更包括一光学检测模块370。光学检测模块370设置于检测载台110的另一侧,光学检测模块370能接收并分析多个led晶粒52所发出的光信号。
45.此外,在一实施例中,光电检测系统均包括图5的电性检测模块260与图6的光学检测模块370。
46.图7为本发明的检测晶粒方法的流程图。请参阅图7。本实施例的检测晶粒方法s100包括以下步骤s110至步骤s150。检测晶粒方法s100可应用如图1、图5、图6的光电检测系统100、200、300或类似的光电检测系统。
47.首先,进行步骤s110并参酌图1与图2,提供设有多个led晶粒52的一载体50于一检
测载台110。每一led晶粒52设有两个焊垫524、526,且载体50定义有至少一欲检测区域g1,每一焊垫524、526定义有一位置参考点pf1、pf2。
48.接着,进行步骤s120并参酌图1与图2,执行水平位置控制。一运动模块120依据一水平位置信息mx而控制一影像撷取模块140、一探针卡130及检测载台110的一水平相对位置,使每个探针(如探针136a、136b)的针尖(如针尖pt1、pt2)能对应位于欲检测区域g1内的焊垫(如焊垫524、526)。需说明的是,探针卡130的具体结构与其相关说明可参考前述,在此不重复赘述。
49.接着,进行步骤s130并参酌图1、图2与图4a,执行影像撷取。影像撷取模块140能透过穿透孔134对多个针尖(如针尖pt1、pt2)及其对应的焊垫(如焊垫524、526)进行影像撷取而得一欲检测影像信息md,欲检测影像信息md包含一针尖信息md1以及欲检测焊垫信息md2,其中针尖信息md1对应多个针尖(如针尖pt1、pt2),欲检测焊垫信息md2对应欲检测区域g1内多个焊垫(如焊垫524、526)。
50.接着,进行步骤s130并参酌图1、图2、图4a与图4b,分析位置信息,由一分析模块150分析针尖信息md1及欲检测焊垫信息md2而计算出针尖(如针尖pt1、pt2)相对其所对应焊垫(如焊垫524、526)的位置参考点(如位置参考点pf1、pf2)的水平偏移量(如水平偏移量sx1、sx2、sxn),且分析模块150依据各水平偏移量(如水平偏移量sx1、sx2、sxn)而计算出一水平容许值tx,再将水平容许值tx结合水平位置信息mx而决定一扎针水平位置信息px。
51.接着,进行步骤s150,并参酌图1、图2、图4a与图4b,执行扎针作业。运动模块120依据运动模块120依据扎针水平位置信息px而调整探针卡130与检测载台110的水平相对位置后,再依据垂直位置信息my而控制探针卡130与检测载台110的垂直相对位置,以使各针尖能电性接触其所对应的焊垫。由于对位过程中可同时对探针的针尖及led晶粒的焊垫进行取像,并寻求媒合各探针的一最佳扎针位置,使得欲检测区域g1内的led晶粒52的电性较为均匀。
52.在其他实施例中,分析位置信息的步骤s130,参酌图3,载体50尚定义待检测区域g2,穿透孔134暴露出欲检测区域g1与待检测区域g2内的多个焊垫524、526,影像撷取模块140能透过穿透孔134对欲检测区域g1与待检测区域g2的多个焊垫524、526进行影像撷取,使得欲检测影像信息md尚包括对应待检测区域g2内的多个焊垫的一待检测焊垫信息,且分析模块150能分析待检测焊垫信息。如此一来,本实施例可在先对欲检测区域g1进行扎针的同时,亦可透过穿透孔134先对下一个要检测的待检测区域g2内焊垫进行影像撷取,使得探针卡130对欲检测区域g1进行扎针之后,无需计算与调整待检测区域g2内的扎针位置,即可再进行扎针,有助提升扎针的时程。
53.接着,于所述执行扎针作业的步骤s150之后,更包括电性检测步骤,电性检测模块260可对数个led晶粒52进行电性检测。
54.此外,于所述执行扎针作业的步骤s150之后,更包括光学检测步骤。光学检测模块370设置于检测载台110的另一侧而能接收并分析多个led晶粒52所发出的光信号。
55.综上所述,在本发明的光电检测系统与检测晶粒方法中,可同时对一区域内的多个led晶粒进行检测,并于扎针之前,透过探针卡的穿透孔来对针尖及多个led晶粒的焊垫进行取像,以调整针尖与焊垫的位置。
56.再者,本发明可通过计算每个针尖与其对应焊垫的水平偏移量,并寻求媒合各探
针的一最佳扎针位置,使各针尖相对于焊垫的位置均位于容许范围之内,使得区域内的led晶粒的电性较为均匀。
57.此外,由于本发明可有效且精准控制扎针量测位置,也有助于后续进行光电性量测的检测效率。
58.进一步,本发明可在先对欲检测区域进行扎针的同时,亦可透过穿透孔先对下一个要检测的待检测区域内焊垫进行影像撷取,使得探针卡对欲检测区域进行扎针之后,无需计算与调整待检测区域内的扎针位置,即可再进行扎针,有助提升扎针的时程。
59.虽然本发明已以实施例揭露如上,然其并非用以限定本发明,任何所属技术领域中具有通常知识者,在不脱离本发明的精神和范围内,当可作些许的更动与润饰,故本发明的保护范围当视权利要求范围所界定为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。