用于计算行驶距离的方法及利用该方法的车辆
1.相关申请的交叉引用
2.本技术要求2020年6月16日提交的韩国专利申请no.10
‑
2020
‑
0072910的优先权,该申请的全部内容以引用的方式并入本文。
技术领域
3.本发明涉及用于计算行驶距离的方法及利用该方法的车辆。
背景技术:
4.组合仪表板通过can通信传输行驶距离,但是在完成组合仪表板can初始化之前,存在传输异常行驶距离的问题,诸如初始值(例如0x000000)或故障信号(例如0xffffff)。其结果是,后续行驶距离可能会产生误差,并且作为累积值的累计行驶距离也可能产生误差。
5.公开于该背景技术部分的上述信息仅仅旨在加深对本发明背景技术的理解,因此其可以包含的信息并不构成在本国已为本领域普通技术人员所公知的现有技术。
技术实现要素:
6.本发明提供了一种车辆和用于计算车辆的行驶距离的方法,其能够使由于异常接收到的行驶距离信号而导致的行驶距离误差最小化。
7.示例性的车辆可以包括组合仪表板和发动机ecu。组合仪表板可以生成行驶距离信号,所述行驶距离信号指示使用车速传感器检测的行驶距离。发动机ecu可以配置为:当点火时接收到的行驶距离信号指示初始值时,将最近一次熄火时的行驶距离设定为当前行驶距离;在当前时间点之前的预定时间段的临时先前行驶距离和当前时间点的临时当前行驶距离大于或等于设定的当前行驶距离时,将临时先前行驶距离和临时当前行驶距离分别设定为先前行驶距离和当前行驶距离。
8.发动机ecu可以配置为:当点火时接收到的行驶距离信号指示初始值时,或者在临时先前行驶距离和临时当前行驶距离小于设定的当前行驶距离时,将临时先前行驶距离和临时当前行驶距离设定为最近一次熄火时的行驶距离。
9.发动机ecu可以配置为:基于设定的先前行驶距离和设定的当前行驶距离,随后计算并更新先前行驶距离和当前行驶距离,从而计算行驶距离。
10.行驶距离可以包括单位时间行驶距离、总累计行驶距离以及在当前驾驶周期期间的行驶距离。发动机ecu可以配置为:通过将当前行驶距离减去先前行驶距离来计算单位时间行驶距离;通过将单位时间行驶距离与先前行驶距离相加来更新总累计行驶距离;通过将总累计行驶距离减去最近一次熄火时的行驶距离来计算当前驾驶周期期间的行驶距离。
11.发动机ecu可以配置为:当点火时接收到的行驶距离信号是故障信号时,结束行驶距离的计算。
12.发动机ecu可以配置为:当车辆转为熄火状态时,将当前行驶距离存储为当前熄火
时的行驶距离;计算当前驾驶周期期间的行驶距离。
13.一种示例性的用于计算车辆的行驶距离的方法包括:生成指示行驶距离的行驶距离信号;确定在点火时接收到的行驶距离信号是否指示初始值;在接收到的行驶距离信号是初始值时,将最近一次熄火时的行驶距离设定为当前行驶距离;将当前时间点之前的预定时间段的临时先前行驶距离和当前时间点的临时当前行驶距离与设定的当前行驶距离进行比较;在临时先前行驶距离和临时当前行驶距离大于或等于设定的当前行驶距离时,将临时先前行驶距离和临时当前行驶距离分别设定为先前行驶距离和当前行驶距离。
14.用于计算车辆的行驶距离的示例性方法可以进一步包括:当临时先前行驶距离和临时当前行驶距离小于设定的当前行驶距离时,将临时先前行驶距离和临时当前行驶距离设定为最近一次熄火时的行驶距离。
15.示例性的用于计算车辆的行驶距离的方法可以进一步包括:基于设定的先前行驶距离和设定的当前行驶距离,随后计算并更新先前行驶距离和当前行驶距离,从而计算行驶距离。
16.计算行驶距离包括:通过将当前行驶距离减去先前行驶距离来计算单位时间行驶距离;通过将单位时间行驶距离与先前行驶距离相加来更新总累计行驶距离;通过将总累积行驶距离减去最近一次熄火时的行驶距离来计算当前驾驶周期期间的行驶距离。
17.示例性的用于计算车辆的行驶距离的方法可以进一步包括:当点火时接收到的行驶距离信号是故障信号时,结束行驶距离的计算。
18.示例性的用于计算车辆的行驶距离的方法可以进一步包括:当车辆转为熄火状态时,将当前行驶距离存储为当前熄火时的行驶距离,并计算当前驾驶周期期间的行驶距离。
19.根据示例性实施方案,一种车辆和用于计算车辆的行驶距离的方法,其可以使由于异常接收到的行驶距离信号而导致的行驶距离误差最小化。
附图说明
20.图1示出了本发明的一个实施方案中的与行驶距离有关的车辆的主要部件。
21.图2和图3分别是本发明一个实施方案中的用于计算和存储累计行驶距离的方法的流程图。
22.附图标记说明
23.1:车辆
24.10:组合仪表板
25.11:车速传感器
26.30:发动机ecu。
具体实施方式
27.本发明涉及一种用于计算累计行驶距离的方法,该累计行驶距离用于计算与温室气体和当前驾驶行驶距离(即在当前驾驶期间的行驶距离)相关的燃料效率。为了满足加强的北美车载自动诊断(on
‑
board diagnostics,obd)法规,本发明可以计算准确的累计距离和行驶距离。
28.在本发明的一些实施方案中,可以将车辆的行驶距离存储在作为主控制器的一个
控制器中,并且可以将与行驶距离有关的信息发送到其他控制器。主控制器可以是组合仪表板。发动机电子控制单元(electronic control unit,ecu)可以通过组合仪表板接收车辆行驶距离。
29.发动机ecu可以将点火时接收到的行驶距离与当前接收到的行驶距离之间的差值(即,从组合仪表板接收到的当前行驶距离减去点火时接收到的初始行驶距离的值)计算为当前驾驶行驶距离。发动机ecu可以将上次存储的累计行驶距离与当前驾驶行驶距离之和(即上次存储的累计行驶距离 当前驾驶行驶距离的值)计算为最终累计行驶距离。当前驾驶行驶距离和最终累计行驶距离可以分别存储。
30.在接收到故障信号(例如0xffffff)时,发动机ecu可以停止计算行驶距离,而在接收到初始值(例如0x000000)时,发动机ecu可以补偿在初始点火时接收到的行驶距离,从而改善误差的发生。由发动机ecu存储的累计行驶距离可以用作车辆追踪的主要信息(车辆驾驶信息)。
31.在下文中,将参考附图详细描述在本说明书中公开的示例性实施方案。在本说明书中,相同或相似的组件将由相同或相似的附图标记表示,并且将省略其重复描述。在以下描述中使用的用于组件的术语“模块”和/或“单元”仅是为了容易地描述本说明书。因此,这些术语不具有使它们彼此以及本身区分的含义或作用。在描述本说明书的示例性实施方案时,当确定与本发明相关联的众所周知的技术的详细描述可能使本发明的主旨不清楚时,其将被省略。提供附图仅是为了允许容易理解本说明书中公开的示例性实施方案,并且不应将其解释为限制本说明书中公开的精神,并且应当理解,在不脱离本发明的范围和精神的情况下,本发明包括所有修改、等同和替换。
32.包括序数(例如第一、第二等)的术语将仅用于描述各种组件,并且不应解释为限制这些组件。这些术语仅用于区分一个组件与其他组件。
33.应当理解,当一个组件被称为“连接”或“接合”到另一组件时,它可以直接连接或接合到另一组件,或者可以通过介于它们之间的又一组件而连接或接合到另一组件。此外,应当理解,当一个组件被称为“直接连接”或“直接接合”到另一组件时,它可以直接连接或接合到另一组件,而没有其他组件介于它们之间。
34.还将理解,在本说明书中使用的术语“包括”和“具有”指定存在所陈述的特征、数值、步骤、操作、组件、部件或其组合,但不排除存在或增加一个或更多个其他特征、数值、步骤、操作、组件、部件或其组合。
35.图1示出了根据示例性实施方案的与行驶距离有关的车辆的主要部件。
36.车辆1包括组合仪表板10和发动机ecu 30。组合仪表板10包括车速传感器11。车速传感器11检测车辆1的前车轮和后车轮的转速的至少一个,并生成指示转速的信号。
37.组合仪表板10可以基于由车速传感器11生成的信号来计算行驶距离、存储行驶距离、生成指示行驶距离的行驶距离信号并通过can通信将行驶距离信号发送至发动机ecu 30。
38.发动机ecu 30存储车辆驾驶信息。具体地,法律上要求由发动机ecu 30存储累计行驶距离和当前驾驶行驶距离。在法律上规定,发动机ecu 30必须提供累计行驶距离数据用于尾气的检查。
39.图2和图3分别是本发明一些实施方案中的用于计算和存储累计行驶距离的方法
的流程图。
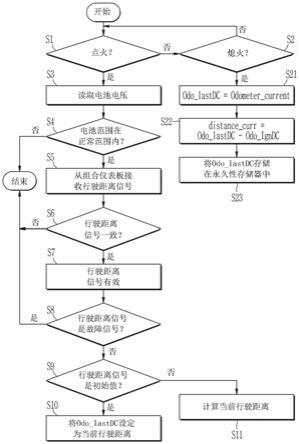
40.如图2所示,在步骤s1中,发动机ecu 30确定车辆1是否转为点火状态。
41.当车辆1未转为点火状态时(步骤s1的否),在步骤s2中,发动机ecu 30确定车辆是否转为熄火状态。
42.当车辆1未转为熄火状态时(步骤s2的否),过程返回到步骤s1。
43.当车辆1转为点火状态时(步骤s1的是),在步骤s3中,发动机ecu 30读取车辆1中提供的电池电压。
44.在步骤s4中,发动机ecu 30确定在步骤s3读取到的电池电压是否在正常范围内,例如10v
‑
16v。当电池电压超出正常范围时(步骤s4的否),发动机ecu结束行驶距离计算。
45.当电池电压在正常范围内时,例如10v
‑
16v(步骤s4的是),在步骤s5中,发动机ecu 30从组合仪表板10接收与行驶距离有关的信号(以下称为行驶距离信号)。组合仪表板10计算并存储行驶距离,并且可以响应于来自发动机ecu 30的请求,通过can通信将指示当前行驶距离的行驶距离信号发送到发动机ecu 30。组合仪表板10也可以在对当前行驶距离的请求下,通过can通信将行驶距离信号发送到另一控制器。
46.在步骤s6中,发动机ecu 30确定通过can通信接收到的行驶距离信号是否一致。例如,发动机ecu 30可以执行存活检查和/或校验和过程。
47.存活检查是指发送控制器和接收控制器在每次信号发送时分别对发送次数进行计数,并将由发送控制器发送的信号的计数值与接收控制器接收到的信号的计数值进行比较。即,将组合仪表板10发送的行驶距离信号中包括的计数值与发动机ecu 30接收到的信号的计数值进行比较,并且当两个计数值相等时,发动机ecu 30确定不存在丢失信号。
48.或者,可以将针对接收控制器接收到的信号执行的校验和与从发送控制器发送的信号一起发送的校验和进行比较。即,发动机ecu 30可以将从组合仪表板10接收到的校验和与由发动机ecu 30计算出的校验和进行比较,并且可以以字节为单位确定接收到的信号是否有效。
49.当发现具有一致性时(步骤s6的是),在步骤s7中,发动机ecu30确定从组合仪表板10接收到的行驶距离信号是有效信号。
50.当发现没有一致性时(步骤s6的否),发动机ecu 30结束行驶距离计算。
51.在步骤s7之后,在步骤s8中,发动机ecu 30确定行驶距离信号是否为故障信号。例如,故障信号的值可以是“0xffffff”,并且发动机ecu 30可以将行驶距离信号与故障信号进行比较。
52.当行驶距离信号是故障信号时(步骤s8的是),发动机ecu 30结束行驶距离计算。
53.当行驶距离信号不是故障信号时(步骤s8的否),在步骤s9中,发动机ecu 30确定行驶距离信号是否为初始值。例如,初始值可以是“0x000000”,并且发动机ecu 30可以将行驶距离信号与初始值进行比较。
54.当行驶距离信号是初始值时(步骤s9的是),在步骤s10中,发动机ecu 30可以将在最近一次熄火时接收到的行驶距离odo_lastdc设定为当前行驶距离odometer_current。
55.当行驶距离信号不是初始值时(步骤s9的否),在步骤s11中,发动机ecu 30基于行驶距离信号计算当前行驶距离。
56.另外,当行驶距离信号是初始值时(步骤s9的是),发动机ecu30可以在预定的监测
时间段期间监测组合仪表板10是否正常地生成并发送行驶距离信号。
57.图3是显示在接收到行驶距离信号的初始值之后的监测时间段期间发动机ecu的操作的流程图。
58.在步骤s12中,发动机ecu 30将临时先前行驶距离odo_0设定为基于当前时间点之前的预定时间段(例如1秒)的行驶距离信号而计算出的行驶距离。
59.然后,在步骤s13中,发动机ecu 30确定是否经过了预定时间段(即1秒)。当尚未经过1秒时,发动机ecu 30继续监测时间的经过。
60.在步骤s14中,当经过了1秒的预定时间段时,发动机ecu将临时当前行驶距离odo_1设定为基于当前行驶距离信号计算出的行驶距离。
61.随后在步骤s15中,发动机ecu 30确定临时先前行驶距离odo_0和临时当前行驶距离odo_1是否大于或等于在步骤s10中设定的当前行驶距离odometer_current。在步骤s10中设定的当前行驶距离odometer_current是在最近一次熄火时接收到的行驶距离odo_lastdc。
62.当临时先前行驶距离odo_0和临时当前行驶距离odo_1大于或等于当前行驶距离odometer_current时(步骤s15的是),在步骤s16中,发动机ecu 30确定行驶距离信号是由组合仪表板10正常生成并发送的,并将临时先前行驶距离odo_0和临时当前行驶距离odo_1设定为先前行驶距离odometer_current_1s和当前行驶距离odometer_current。
63.当临时先前行驶距离odo_0和临时当前行驶距离odo_1小于当前行驶距离odometer_current时(步骤s15的否),在步骤s17中,发动机ecu 30确定行驶距离信号存在误差,并将在最近一次熄火时接收到的行驶距离odo_lastdc设定为先前行驶距离odometer_current_1s和当前行驶距离odometer_current。
64.尽管通过步骤s16和步骤s17不同地设定了当前行驶距离odometer_current和先前行驶距离odometer_current_1s的值,但是与基于具有误差(该误差是由故障信号或初始值导致的)的行驶距离信号计算出的行驶距离相比,根据步骤s15的结果,基于通过步骤s16或步骤s17设定的当前行驶距离而计算出的行驶距离显示出显著降低的误差。
65.基于通过步骤s16和步骤s17的任何一个设定的先前行驶距离和当前行驶距离,随后计算并更新先前行驶距离和当前行驶距离,发动机ecu 30可以计算单位时间行驶距离、以单位时间更新的总累计行驶距离以及在相应的驾驶周期期间的行驶距离。
66.更详细地,单位时间可以是1秒,在步骤s18中,发动机ecu 30可以根据以下所示的方程式1来计算单位时间行驶距离。
67.(方程式1)
68.distance_new=odometer_current
‑
odometer_current_1s
69.在此,distance_new表示单位时间行驶距离,odometer_current表示当前行驶距离,odometer_current_1s表示先前行驶距离。
70.在步骤s19中,发动机ecu 30可以根据以下所示的方程式2来计算并更新单位时间的当前(第i)总累计行驶距离。
71.(方程式2)
72.总距离(i)=odometer_current_1s distance_new
73.在此,总距离(i)表示总累计行驶距离,odometer_current_1s表示先前行驶距离,
distance_new表示单位时间行驶距离。
74.在步骤s20中,发动机ecu 30可根据以下所示的方程式3来计算当前驾驶周期的总距离。
75.(方程式3)
76.当前驾驶周期的行驶距离=总距离(i)
‑
odo_lastdc
77.在此,总距离(i)表示当前的总累计行驶距离,odo_lastdc表示在最近一次熄火时的行驶距离。
78.在方程式3中,“odo_lastdc”表示在最近一次熄火时接收到的行驶距离。
79.再次参考图2,当确定出车辆1处于熄火状态时(步骤s2的是),在步骤s21中,发动机ecu 30将当前行驶距离odometer_current设定为当前熄火时的行驶距离odo_lastdc(即,odo_lastdc=odometer_current)。
80.随后在步骤s22中,发动机ecu 30计算当前驾驶周期期间的行驶距离。例如,发动机ecu 30可以通过将当前熄火时的行驶距离odo_lastdc减去点火时的行驶距离odo_igndc来计算当前驾驶周期期间的行驶距离distance_curr。点火时的行驶距离odo_igndc可以是最近一次熄火时的行驶距离。
81.在步骤s23中,发动机ecu 30可以将当前熄火时的行驶距离odo_lastdc存储在永久性存储器中。
82.这样一来,根据示例性实施方案,当由于组合仪表板初始化误差而接收到行驶距离的误差信号时,利用最近一次驾驶周期的熄火时接收到的行驶距离来替代累计行驶距离,从而可以防止发动机ecu存储行驶距离的误差。
83.在当前行驶距离值小于接收到初始值信号时或之前立即接收到的行驶距离(例如前1秒)时,可以用之前1秒接收到的行驶距离替代当前行驶距离,从而可以防止ecu存储误差。由此,可以满足加强的北美法律,所述加强的北美法律是关于驾驶信息提交的法律。
84.虽然结合目前被视为是实际的示例性实施方案来描述本发明,但是应该理解,本发明并不限于所公开的实施方案。相反,本发明旨在覆盖包括在所附权利要求的精神和范围之内的各种修改形式和等效形式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。