1.本公开涉及具有可控制功能的低瓦数的电动马达。
背景技术:
2.低瓦数的电动马达可以用于车辆中以形成车辆内部的可调节部件。可调节的内部部件可以包括座椅、方向盘、控制台、踏板、座椅安全带和乘客或驾驶员可能希望以最佳方式布置的其他内部部件。
3.现有系统可能具有有限的控制或有限数量的马达。将期望用可调节特征来改装现有车辆内部,从而产生智能马达系统。
技术实现要素:
4.本公开的一个方面涉及一种智能马达系统,包括:传感器、与传感器进行第一数据通信的控制器、与控制器进行电通信的马达、以及与控制器进行第二数据通信并被配置为向用户呈现指示智能马达系统的操作参数的系统数据的接口。传感器可以是可操作的以产生传感器数据,所述传感器数据指示测量车辆内部的可配置元件的布置的至少一个参数。马达可以由经由控制器和马达之间的电通信传输的电信号操作。控制器可操作以在至少一个参数指示可配置元件的布置超出阈值时阻止马达的操作,并且其中第一数据通信包括本地互连网络。
5.本公开的另一方面涉及一种智能马达系统,包括:第一马达,其被配置为响应于电刺激并且可操作以控制车辆内部的第一可配置元件的布置;第二马达,其被配置为响应于电刺激并且可操作以控制车辆内部的第二可配置元件的布置;控制器,其与所述第一马达和所述第二马达电通信;第一传感器,其与所述控制器数据通信并且可操作以生成指示测量所述第一可配置元件的布置的至少第一参数的第一传感器数据;第二传感器,其与所述控制器数据通信并且可操作以生成指示测量所述第二可配置元件的布置的至少第二参数的第二传感器数据;以及接口,其与所述控制器数据通信并且被配置为向用户呈现指示所述智能马达系统的操作参数的系统数据。控制器可操作以在第一参数指示第一可配置元件的布置超过第一阈值时阻止第一马达的操作,控制器可操作以在第二参数指示第二可配置元件的布置超过第二阈值时阻止第二马达的操作,并且其中数据通信包括本地互连网络。
6.在一些实施例中,控制器可以可拆卸地耦合到马达。在一些实施例中,本地互连网络可以包括控制器局域网。
7.下面将参考附图更详细地解释本公开的上述方面和其他方面。
附图说明
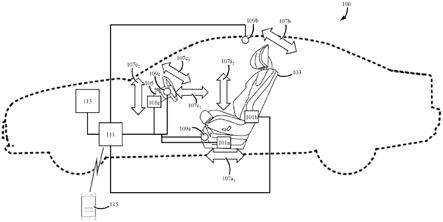
8.图1是具有多个模块化智能马达的车辆内部的图解视图。
9.图2是包括多个模块化智能马达的车辆控制台的图解视图。
10.图3是具有模块化智能马达和控制系统的车辆座椅的图解视图。
11.图4是具有模块化智能马达和控制系统的车辆座椅的图解视图。
12.图5是具有多个模块化智能马达的车辆内部的图解视图。
13.图6是包括马达控制器和兼容电动马达的模块化智能马达组件的侧视图。
14.图7是模块化智能马达组件的侧视图。
具体实施方式
15.参照附图公开了所示实施例。然而,要理解的是,所公开的实施例仅旨在作为可以以各种和替代形式实施的示例。附图不一定按比例绘制,并且一些特征可能被放大或缩小以示出特定部件的细节。所公开的具体结构和功能细节不要被解释为限制性的,而是作为用于教导本领域技术人员如何实践所公开的构思的代表性基础。
16.图1是具有内部的车辆100的图解视图。车辆100的内部可以具有多个可配置的元件,其可以由多个马达组件101中的一个控制。每个马达组件101可以包括可操作以操纵至少一个相关联的可配置元件的电动马达和能够向相关联的电动马达提供功率以控制操纵的控制器。每个控制器还能够发送和接收数据,诸如控制数据,并响应于该数据产生相应的功率信号以操作相关的电动马达。在所描绘的实施例中,可配置的元件可包括座椅103和方向盘105,但其他可配置的元件可包括座椅安全带、控制台、控制台面板、驱动踏板、座椅收起机构、闩锁机构或普通技术人员已知的任何其他可配置的元件,而不偏离本文所公开的教导。尽管在所描绘的实施例中,所示的可配置元件与车辆100内的驾驶员位置相关,但在不偏离所公开的教导的情况下,其他实施例可包括与车辆的乘客位置或存储配置相关的附加可配置元件。作为示例而非限制,在不偏离本文所公开的教导的情况下,附加的可配置元件可以包括乘客座椅、可折叠桌子、可折叠搁架、储存隔间的折叠分离件、加热的座椅元件、加热的垫元件、电力行李箱或电力后挡板。
17.可配置元件的配置可以沿着至少一个可调节方向107发生。马达组件101可以可操作以沿着一个或多个可调节方向107进行调节。作为示例而非限制,马达组件101a可以可操作成通过调节其沿可调节方向107a1的位移来调节座椅103的腿部空间,同时还可操作成通过调节其沿可调节方向107a2的位移来调节座椅103的高度。相反,马达组件101b可以仅可操作以通过调节座椅靠背沿可调节方向107b的位移来调节座椅103的相对倾斜。马达组件101可以可操作以沿着任意数量的可调节方向107控制可配置元件。例如,马达组件101c可以是可操作的以在至少三个可调节方向上调节方向盘105的相对位置。方向盘105可沿可调节方向107c1移动靠近或远离驾驶员。方向盘105可沿可调节方向107c2竖直升高或降低。方向盘105可沿可调节方向107c3倾斜,以优化其位置以便驾驶员够到。
18.在其中单个马达组件101可以以多种方式调节可配置元件的实施例中,马达组件101可以包括多个马达或单个马达,其可操作以执行多个功能而不偏离本文公开的教导。
19.在所描绘的实施例中,座椅103被示出为可相对于腿部空间沿着可调节方向107a1配置,相对于竖直高度沿着可调节方向107a2配置,并且相对于倾斜沿着可调节方向107b配置。座椅103可以包括其他可调节部件,而不偏离本文所公开的教导。作为示例而非限制,座椅103可以包括所示的倾斜控制、腿部空间控制和竖直控制,而且还可以包括诸如腰部控制、旋转控制、歪斜控制、座椅硬度控制、斜倚控制和折叠控制的控制,而不偏离本文公开的教导。其他实施例可包括控制的不同组合,而不偏离本文中所公开的教导。
20.在所描绘的实施例中,车辆100可有利地利用多个传感器109来生成测量一个或多个可配置元件的布置的传感器数据。传感器109可以经由本地互连网络(lin)与马达组件101的控制器进行数据通信。在所描绘的实施例中,lin由lin集线器111支持,该lin集线器提供连接到lin的装置之间的数据通信,但是其他实施例可以包括部件之间的独立通信,而不偏离本文所公开的教导。在所描绘的实施例中,lin可以包括控制器局域网(can)协议,并且lin集线器111可以包括can总线。其他实施例可以包括其他配置而不偏离本文所公开的教导。
21.传感器109可以用于提供对马达组件101中的一个或多个特别有用的指示。传感器109中的每一个可包括距离传感器、接近度传感器、力传感器、张力传感器、重量传感器、障碍物传感器或本领域普通技术人员已知的另一传感器类型中的一者或多者。每个传感器109可被配置为提供对马达组件101中的一个或多个有用的测量,诸如距离测量、接近度测量、力测量、张力测量、重量测量、对象检测或本领域普通技术人员已知的任何其他类型的测量。由每个传感器109提供的测量值可以用于指示所测量的环境的参数。所述参数可以包括系统的元件或系统环境内的对象之间的距离、由系统的元件施加的力、施加在系统的元件上的力、由系统的元件经受的张力、系统环境内的对象的重量、或系统环境内的对象的检测。在所描绘的实施例中,马达组件101的控制器可以是可操作的以从一个或多个传感器109请求传感器数据,并且响应于所接收的传感器数据产生相应的功率信号以操作相关联的电动马达。作为示例而非限制,控制器可监测传感器109的特定测量值,并且如果测量值超过阈值,则中断相关联的电动马达的主动操作。这样的阈值可以对应于可配置元件的特定布置,并且可以表示出于乘客舒适性或安全性的原因的布置中的限定限制。这样的阈值可以用于通过提供马达组件101的“防夹”或“防陷”功能来提高安全性,其中马达组件101被配置为响应于超过阈值的测量结果而停止操作,该阈值指示对外部对象的损坏、对马达的损坏、或对乘客或用户的伤害的可能性。用于实现马达组件101的防夹或防陷功能的传感器可以被称为“防夹传感器”或“防陷”传感器。
22.作为示例而非限制,传感器109a可包括可操作以检测座椅103前方的对象的接近度的障碍物传感器,并且马达组件101a可监测由传感器109a检测到的任何对象的接近度。如果由传感器109a产生的传感器数据指示的接近度低于最小阈值,则马达组件101a可以停止向其相关联的电动马达提供功率,以避免对系统的损坏、对乘客的伤害、对乘客的不适或对附近对象的损坏。传感器109可以被配置为预测车辆100的一般使用条件。作为示例而非限制,传感器109a可被配置为仅检测小于预定阈值大小的对象,因为应理解,当座椅103被驾驶员占用时,驾驶员的腿部可在座椅103的前面。替代性地,马达组件101a可以利用阈值的层级,其中,与较大对象(诸如驾驶员的腿部)相比,可以针对较小对象来不同地限定接近度阈值。
23.传感器109可以设置在车辆100的内部,有利地处于它们是最有效的位置中。作为示例而非限制,传感器109b可包括设置在车辆100的顶棚内的接近度传感器。这种布置可以使得传感器109b有利于检测乘客的头部何时接近顶棚。马达组件101a和101b可以在座椅103的竖直或倾斜控制期间有利地利用这种数据,并且如果乘客的头部进入传感器109b的阈值接近度内,则可以减慢或中断它们对它们的相关联的电动马达的操作,以优化乘客的舒适性和安全性。
布置以适应各种顾客。替代性地,每个客户可设置他们自己的与车辆的优选配置对应的阈值的集合,并且车辆100可将其自身布置成用于共乘的下一个客户的优选配置。在一些实施例中,车辆100可以包括利用马达组件101a的“容易进入”特征。在这样的实施例中,座椅103可以沿着可调节方向107a定位,使得当检测到驾驶员已经离开车辆时,座椅距方向盘105的距离被最大化。座椅103可以保持在该位置中,直到驾驶员进入车辆100,以便优化进入的容易性。在检测到驾驶员坐在座椅103中之后,马达组件101a可以随后将座椅103重新定位到驾驶员选择的不同位置,以优化在驾驶时的舒适性。这样的实施例对于共乘车辆可能是特别有利的,共乘车辆可能具有各种各样的驾驶员,他们具有不同的高度或进入或离开车辆的不同困难。其他实施例可对其他座椅或配置采用“容易进入”调节,而不偏离本文所公开的教导。
29.在所描绘的实施例中,用户可以创建和存储一个或多个用户可选择的阈值,其对应于可配置元件的用户定义的“预设”布置。这种用户定义的预设布置可以用于在车辆100的操作期间优化乘客的舒适性。在所描绘的实施例中,用户可以为车辆100的一个或多个可配置元件定义多个用户定义的当前布置。作为示例而非限制,不在驾驶的乘客可以定义与他们在乘坐期间的最佳阅读舒适性相对应的预设布置,以及与他们的最佳睡眠舒适性相对应的另一预设布置。在不偏离本文所公开的教导的情况下,用户可以存储和访问其他布置。用户定义的预设布置可以存储在存储器113、与计算装置115相关联的存储器、或者lin集线器111可访问的另一存储器中,诸如经由互联网连接可访问的云存储存储器。
30.在所描绘的实施例中,用户可以利用计算装置115的接口来直接控制车辆100的可配置元件中的一个或多个。在一些实施例中,可配置元件的接口控制可以覆盖预定阈值。在一些实施例中,可配置元件的接口控制可以不覆盖预定阈值,诸如出于与安全有关的原因而定义的阈值。在所描绘的实施例中,基于用户舒适性定义的一些阈值可以被接口控制或用户定义的预设所覆盖,而基于安全性定义的其他阈值可以不被用户覆盖。其他实施例可以包括其他配置而不偏离本文所公开的教导。
31.车辆100可以包括附加的可配置元件,而不偏离本文所公开的教导。图2是具有可配置元件的控制台的图示,所述可配置元件可以利用智能马达组件(诸如马达组件101(参见图1))来调节。在所描绘的实施例中,方向盘105可以以与上文关于图1所描绘的相同的方式被调节,但控制台的其他元件可以是可配置的。在所描绘的实施例中,仪表板201可相对于其沿可调节方向203到乘客的接近度进行调节,并且还可相对于其沿可调节方向205的竖直取向进行调节。仪表板201可以另外提供与由计算装置115(参见图1)提供的接口类似的补充接口207。接口207可以包括触摸屏设备,或者可以包括多个外部控制器209。仪表板201的布置可以针对用户舒适性进行优化,并且由马达组件控制,所述马达组件是诸如马达组件101(未示出,参见图1)。在所描绘的实施例中,控制台的其他部件可以是可调节的,诸如换挡杆(gear shifter)211,其高度可以沿着可调节方向213调节,以便优化驾驶员的舒适性。
32.在所描绘的实施例中,相关的马达组件未示出,因为它们有利地设置在车辆的控制台内,远离乘客的视野。这种布置可能是有利的,因为它优化了可用于接口207和控制器209向用户提供功能性的空间。在所描绘的实施例中,接口207和控制器209可向用户提供附加的车辆功能性,诸如内部气候控制或多媒体访问,而不偏离本文所公开的教导。
33.图3是座椅103的操作的图解视图。在所描绘的实施例中,座椅103利用轨道301沿可调节方向107a1移动。轨道与马达组件(未示出;参见图1)接合以便提供运动。传感器309包括障碍物传感器,其可操作以测量轨道301上外来对象的存在,所述外来对象诸如玩具313。如果座椅103在玩具313的阈值接近度内移动,则相关的马达组件可以停止运动,以便有利地避免对其电动马达部件、轨道301或玩具313的损坏。在所描绘的实施例中,如果阻挡轨道301的对象是车辆内的人或宠物,则该功能可以附加地有利地防止伤害。在所描绘的实施例中,传感器309设置在座椅103的后部上,但是其他实施例可以包括其他构造而不偏离本文所公开的教导。在所描绘的实施例中,马达组件设置在座椅103内,这有利地使车辆内可接近的移动部件的数量最小化,从而优化电动马达的安全性。
34.其他实施例可以包括其他传感器类型。图4是使用马达组件401机动化的座椅安全带调节的图解视图。马达组件401可以是可操作的以在安全带403被拉过乘客(未示出)的身体时调节其张力。马达组件401可以依靠由张力传感器409产生的数据来测量座椅安全带沿着方向407的张力。如果座椅安全带的张力大于阈值,则为了用户的安全舒适性,马达组件401的控制器可以调节张力。在所描绘的实施例中,张力调节可以是相对于由张力传感器401生成的传感器数据的情境敏感的(context sensitive)。作为示例而非限制,张力的非常突然的大增加可以指示车辆正经历制动操纵,并且张力可以被保持或增加以利于乘客的安全性。相反,一系列迅速消退的张力突然小幅增加可能表明用户出于舒适性的原因而不安地玩弄着座椅安全带,并且可以放松张力以优化乘客的舒适性。
35.图4描绘了马达组件401,但是在一些实施例中,马达组件401可以设置在车辆内部的控制台、面板或其他结构部件的后面。将马达组件设置在车辆内部的结构部件后面,通过使乘客与电动马达的相互作用和外部对象干扰最小化,可以有利地提高与马达组件401相关联的电动马达的安全操作。
36.图5是上面关于图1描述的马达系统的替代性实施例的图解图示,其特征在于具有多个可配置元件的车辆500,所述可配置元件是诸如座椅503和乘客控制台505。在所描绘的实施例中,车辆500包括小型货车,但是在不偏离本文所公开的教导的情况下,其他实施例可以包括其他车辆类型,包括以上关于图1列出的那些。在所描绘的实施例中,座椅503包括具有座椅收起功能的折叠式长凳座椅,但是在不偏离本文所公开的教导的情况下,其他实施例可以包括其他配置,包括上面关于图1列出的那些。在所描绘的实施例中,控制台505包括饮料和存储控制台,但其他实施例可包括其他控制台配置,包括以上关于图2列出的那些,而不偏离本文所公开的教导。在所描绘的实施例中,马达组件101d和101e可操作以控制座椅503的功能。在所描绘的实施例中,每个马达组件101可以与控制设备进行数据通信,诸如lin集线器111(未示出;参见图1),或者经由用户接口,诸如计算装置115(未示出;参见图1)或接口207(未示出;参见图2)。
37.马达组件101d可以是可操作的以控制座椅503相对于可调节方向507、509和511的布置。可调节方向507可包括座椅503的折叠机构,其适于配置座椅503以优化物品在车辆500的车厢内的存储,或用于座椅收起功能。马达组件101d可进一步相对于车辆500的车厢调节座椅503的前后位置。马达组件101d还可以是可操作的以调节座椅503的竖直位置,诸如至位于车辆车厢的地板下方的车辆500的储存腔513内。通过利用马达组件101d的功能,车辆500可被配置成处于收起位置,其中座椅503被折叠并降低到储存腔513中。当座椅503
被配置成处于收起位置并储存在储存腔513内时,用于货物、诸如行李515的储存空间可在车辆500的车厢内被最大化。在一些实施方式中,座椅503的配置可以包括不同数量的马达组件,而不偏离本文所公开的教导。
38.因为座椅503可以沿可调节方向507、可调节方向509和可调节方向511定位,所以提供一种机构以防止由于马达组件101不产生的力而引起的不希望的调节可能是有利的。马达组件101e可包括机动化的闩锁机构,该闩锁机构可操作以防止座椅503的位置的不期望的调节。作为示例而非限制,当座椅503被确定为不处于收起配置时,马达组件101e可以操作闩锁机构。当马达组件101e的闩锁被马达组件激活时,可以防止座椅503沿着可调节方向509的运动。作为示例而非限制,这在将诸如行李515的货物存储在车辆中座椅503后面时可能是有用的。在所描绘的实施例中,如果行李515的惯性没有被车辆500的减速克服,则车辆500的突然减速可能导致行李515推靠座椅503的背部。在这样的实施例中,由马达组件101e激活的闩锁可以有利地防止座椅503相对于可调节方向509的运动,从而改善乘客的安全状况并防止行李515的不安全运动。在不偏离本文所公开的教导的情况下,其他实施例可以包括由马达组件101控制的其他闩锁机构。
39.在所描绘的实施例中,马达组件101f可以可操作以调节控制台505相对于可调节轴线517的相对位置。在所描绘的实施例中,马达组件101f可以可操作以相对于关于座椅503的竖直和左右方向调节控制台505的位置。其他实施例可以包括马达组件101f的其他功能,诸如打开/关闭控制台505的存储隔间,而不偏离本文所公开的教导。在不偏离本文所公开的教导的情况下,控制台505的一些实施例可以包括不同数量的马达组件101。
40.图6描绘了马达组件的部件,诸如马达组件101(参见图1)。在所描绘的实施例中,马达组件包括两个主要部件:电动马达600和控制器601。电动马达包括由容纳在齿轮壳体605内的齿轮(未示出)驱动的致动器603,所述齿轮由经由电连接器607接收的电信号供电。电动马达600可以另外使用安装板609安装到车辆的结构。在常规环境中,根据由主体控制器生成的指令来生成功率。在这样的实施例中,主体控制器可以包括与lin(诸如lin集线器111(参见图1))电通信的处理器。在所描绘的实施例中,控制器601被配置成通过经由可拆卸电连接与电动马达600直接接口连接而充当车辆的常规电源与电动马达600之间的中介(go-between)。该接口利用输出连接器611来实现,该输出连接器611被配置成由电连接器607接收。在所描绘的实施例中,输出连接器611包括多针闩锁连接器,但是其他实施例可以包括其他配置而不偏离本文所公开的教导。在所描绘的实施例中,输出连接器611可以包括包覆成型的母连接器,其可以有利地允许与各种连接器类型兼容的可定制尺寸。作为示例而非限制,输出连接器611可以包括包覆成型的母连接器,该母连接器在功能上与电驱动器(诸如电连接器607)中存在的各种电输入兼容。在不偏离本文所公开的教导的情况下,除了电连接器607之外,输出连接器611可以与多个标准连接器、常规连接器或专有连接器兼容。
41.控制器601本身经由其输入连接器613接收功率和数据。输入连接器613可以被配置为从lin接收功率和数据。数据可以包括来自传感器的传感器数据、来自与lin进行数据通信的处理器的控制数据,或通信数据。在不偏离本文所公开的教导的情况下,其他配置可以利用通过输入连接器613的其他数据传输。控制器601还包括底架615,底架615容纳控制器处理器(未示出),控制器处理器用于调制经由输出连接器611输出的电信号。在一些实施例中,底架615可以包括存储器,而不偏离本文所公开的教导。在一些实施例中,底架615可
以包括无线发射器、无线接收器或无线收发器,其可操作以在控制器601与一个或多个外部设备(诸如lin集线器)之间提供无线数据通信,而不偏离本文所公开的教导。
42.控制器601有利地包括适合于直接耦合到电动马达600的低轮廓设计(low-profile design),但是其他实施例可以利用适配器或连接器电缆而不偏离本文公开的教导。控制器601与电动马达600的直接耦合可以有利地允许所耦合的马达组件一起容纳在车辆内,诸如在座椅、控制台内或面板后面。控制器601与电动马达600的直接耦合可以另外通过使耦合这两者的电引线的长度最小化来改善装置的电磁兼容性(emc)。最小化耦合控制器601和电动马达600的电引线的长度可以通过最小化系统的易受来自环境或其他外部源的电磁干扰(emi)影响的部分来优化系统的emc。
43.在一些实施例中,输出连接器611和输入连接器613可以包括适合于插入现有车辆电连接中的常规连接器。这样的实施方式可以有利地允许具有现有常规电动马达的车辆被改装有控制器601的功能,诸如上面关于图1描述的自动控制和用户控制。以这种方式,诸如电动马达600的电动马达可以经由控制器601有效地改装成模块化智能马达。有利地,输出连接器611和输入连接器613两者可以可拆卸地连接。因此,可以反转耦合以将车辆恢复到其原始配置或允许更换、修理或升级控制器部件。在不偏离本文公开的教导的情况下,其他实施例可以包括其他配置。
44.图7描绘了当被耦合以用于安装时的图6的马达组件部件。值得注意的是,输出连接器613已经被电连接器607接收并且不再直接可见。在该耦合配置中,组合的马达组件700可以准备好安装在车辆内。在所描绘的实施例中,通过电连接器607和输出连接器611的闩锁机构实现耦合,但是其他配置可以依赖于其他物理机构来稳定耦合。作为示例而非限制,一些实施例可以在电动马达600和控制器601之间利用附加的紧固件。在一些实施例中,底架615可以包括其自身不同的安装板、支架或凸缘,以在安装时帮助相对于电动马达600固定控制器601。
45.虽然上面描述了示例性实施例,但是这些实施例并不旨在描述所公开的装置和方法的所有可能形式。相反,说明书中使用的词语是描述性词语而不是限制性词语,并且要理解的是,在不偏离所要求保护的本公开的精神和范围的情况下,可以进行各种改变。可以组合各种实现实施例的特征以形成所公开构思的另外的实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
