1.本实用新型属于工装技术领域,具体涉及一种无人机水平尾翼安装车。
背景技术:
2.无人机的尾部安装有尾翼,尾翼包括竖直尾翼和水平尾翼两个部分,作为一种提高无人机稳定性的装置,可以在飞行过程中控制无人机的飞行姿态;无人机在出厂、飞行一定年限或者被损伤之后检修时需要进行拆解和安装,无人机水平尾翼通常十分庞大,其运输十分不便。
技术实现要素:
3.为了解决现有技术存在的上述问题,本实用新型的目的在于提供一种方便调节高度的无人机水平尾翼安装车。
4.本实用新型所采用的技术方案为:
5.一种无人机水平尾翼安装车,包括至少两个支托,支托的下端连接有至少两根内丝杠,内丝杠螺纹连接有第一螺母套,第一螺母套转动连接有外丝杠组件,外丝杠组件螺纹连接有第二螺母套;还包括车架,第二螺母套与车架转动连接。
6.无人机水平尾翼可放置于若干支托上,以对水平尾翼进行检修或拆装。由于支托下端连接有至少两根内丝杠,则转动第一螺母套时,内丝杠在第一螺母的驱动下直线升降。当转动第二螺母套时,第二螺母套驱动外丝杠组件自线升降。从而,本实用新型可分别通过内丝杠和外丝杠组件来调整支托相应位置的高度,保证各支托能对无人机水平尾翼的高度和倾角进行准确调整。
7.作为本实用新型的优选方案,所述车架包括车架主体,车架主体上固定有若干立柱,立柱的另一端连接有第二定位套,第二定位套与第二螺母套转动连接。第二定位套能通过轴承对第二螺母套进行可靠支撑,且第二螺母套能相对于第二定位套自由转动,保证第二螺母套能驱动外丝杠组件准确升降。
8.作为本实用新型的优选方案,所述立柱上连接有用于对外丝杠组件进行定位的定位销。当支托的高度调整到位后,可将定位销插入立柱内,从而定位销能对外丝杠组件进行限位,支托在相应位置高度的稳定性。
9.作为本实用新型的优选方案,所述外丝杠组件包括外丝杠,外丝杠与第二螺母套螺纹连接,外丝杠连接有第一定位套,第一定位套与第一螺母套转动连接。第一定位套能对第一螺母套进行可靠支撑,且第一螺母套能相对于第一定位套自由转动,保证第一螺母套能驱动内丝杠准确升降。
10.作为本实用新型的优选方案,所述内丝杠远离支托的一端连接有用于阻挡内丝杠脱出第一定位套的挡板。当内丝杠上升到接触第一定位套时,挡板被第一定位套阻挡,避免内丝杠继续上升。
11.作为本实用新型的优选方案,所述第一螺母套上固定有第一手轮,第二螺母套上
固定有第二手轮。通过第一手轮来带动第一螺母套转动,通过第二手轮来带动第二螺母套转动,操作方便。
12.作为本实用新型的优选方案,所述车架主体的底部安装有若干支撑脚。当本实用新型移动到位后,支撑脚能起到固定和支撑的作用。
13.作为本实用新型的优选方案,所述支撑脚包括转动杆,转动杆与车架主体螺纹连接,转动杆的底部转动连接有支脚座。当本实用新型移动到位后,转动杆转动,则转动杆推动支脚座与地面压紧,起到固定和支撑作用。
14.作为本实用新型的优选方案,所述转动杆远离支脚座的一端连接有支撑手轮。
15.作为本实用新型的优选方案,所述车架主体的底部安装有万向脚轮。带有刹车功能的万向脚轮起到移动和固定的作用。
16.本实用新型的有益效果为:
17.本实用新型的支托下端连接有至少两根内丝杠,则转动第一螺母套时,内丝杠在第一螺母的驱动下直线升降。当转动第二螺母套时,第二螺母套驱动外丝杠组件自线升降。从而,本实用新型可分别通过内丝杠和外丝杠组件来调整支托相应位置的高度,保证各支托能对无人机水平尾翼的高度和倾角进行准确调整。
附图说明
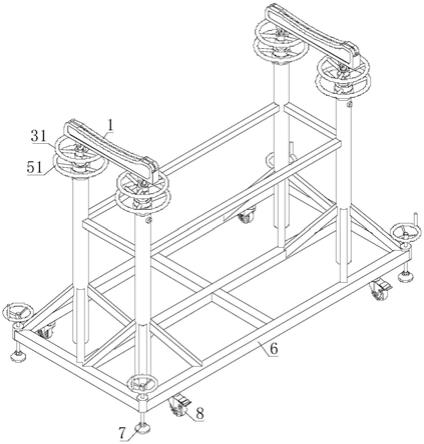
18.图1是本实用新型的结构示意图;
19.图2是本实用新型的左视图;
20.图3是图2中a处的局部放大图;
21.图4是图2中b处的局部放大图。
22.图中,1-支托;2-内丝杠;3-第一螺母套;4-外丝杠组件;5-第二螺母套;6-车架;7-支撑脚;8-万向脚轮;21-挡板;31-第一手轮;41-外丝杠;42-第一定位套;51-第二手轮;61-车架主体;62-立柱;63-第二定位套;64-定位销;71-转动杆;72-支脚座;73-支撑手轮。
具体实施方式
23.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
24.如图1和图2所示,本实施例的无人机水平尾翼安装车,包括两个支托1,支托1的下端连接有两根内丝杠2,内丝杠2螺纹连接有第一螺母套3,第一螺母套3通过轴承连接有外丝杠组件4,外丝杠组件4螺纹连接有第二螺母套5;还包括车架6,第二螺母套5与车架6通过轴承连接。
25.无人机水平尾翼可放置于若干支托1上,以对水平尾翼进行检修或拆装。由于支托1下端连接有至少两根内丝杠2,则转动第一螺母套3时,内丝杠2在第一螺母的驱动下直线升降。当转动第二螺母套5时,第二螺母套5驱动外丝杠组件4自线升降。从而,本实用新型可分别通过内丝杠2和外丝杠组件4来调整支托1相应位置的高度,保证各支托1能对无人机水平尾翼的高度和倾角进行准确调整。
26.其中,如图3所示,所述车架6包括车架主体61,车架主体61上固定有若干立柱62,立柱62的另一端连接有第二定位套63,第二定位套63与第二螺母套5通过轴承连接。第二定位套63能通过轴承对第二螺母套5进行可靠支撑,且第二螺母套5能相对于第二定位套63自由转动,保证第二螺母套5能驱动外丝杠组件4准确升降。
27.更进一步,所述立柱62上连接有用于对外丝杠组件4进行定位的定位销64。当支托1的高度调整到位后,可将定位销64插入立柱62内,从而定位销64能对外丝杠组件4进行限位,支托1在相应位置高度的稳定性。
28.具体地,如图3所示,所述外丝杠组件4包括外丝杠41,外丝杠41与第二螺母套5螺纹连接,外丝杠41连接有第一定位套42,第一定位套42与第一螺母套3通过轴承连接。第一定位套42能对第一螺母套3进行可靠支撑,且第一螺母套3能相对于第一定位套42自由转动,保证第一螺母套3能驱动内丝杠2准确升降。
29.如图4所示,所述内丝杠2远离支托1的一端连接有用于阻挡内丝杠2脱出第一定位套42的挡板21。当内丝杠2上升到接触第一定位套42时,挡板21被第一定位套42阻挡,避免内丝杠2继续上升。
30.所述第一螺母套3上固定有第一手轮31,第二螺母套5上固定有第二手轮51。通过第一手轮31来带动第一螺母套3转动,通过第二手轮51来带动第二螺母套5转动,操作方便。
31.更进一步,所述车架主体61的底部安装有若干支撑脚7。当本实用新型移动到位后,支撑脚7能起到固定和支撑的作用。所述支撑脚7包括转动杆71,转动杆71与车架主体61螺纹连接,转动杆71的底部转动连接有支脚座72。所述转动杆71远离支脚座72的一端连接有支撑手轮73。当本实用新型移动到位后,转动杆71转动,则转动杆71推动支脚座72与地面压紧,起到固定和支撑作用。
32.更进一步,所述车架主体61的底部安装有万向脚轮8。带有刹车功能的万向脚轮8起到移动和固定的作用。
33.安装车最低高度为1582mm,行程为1600mm。
34.本实用新型不局限于上述可选实施方式,任何人在本实用新型的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是落入本实用新型权利要求界定范围内的技术方案,均落在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。