1.本发明涉及一种能够根据检测出的驾驶员的状态来提示警告的车辆的控制装置。
背景技术:
2.作为移动手段的汽车的便利性优异,能够乘坐汽车前往各种地方。此时,也能够想到若在驾驶中在车外存在引起兴趣的事物则驾驶员会过度地注视该注视对象物(也将其称为分心驾驶),进而也有可能因身体状况而产生睡意。
3.在专利文献1等中公开了检测在如此驾驶时可能引起瞌睡和/或分心这样的事故的驾驶员的疏忽的装置。然而,该专利文献1的系统仅按照驾驶员的信息成立,因此导致即使在例如摩擦系数低等前方的路面状况比通常危险的情况下也按照相同的条件进行判断。
4.另一方面,例如在专利文献2中,公开了检测本车辆正在行驶的路面状况等行驶环境而计算出本车辆相对于障碍物的碰撞预测时间的车辆的警报装置。根据该专利文献2,提出了在例如天气状态不好的情况下,与天气状态好的情况相比,将用于求出碰撞预测时间的预定时间延长而对驾驶员进行警报。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2019-105872号公报
8.专利文献2:日本特开2009-116394号公报
技术实现要素:
9.技术问题
10.在不限于上述专利文献的当前技术中,不能说适当地满足了市场的需求,存在以下所述的课题。
11.例如,在上述专利文献1中,如上所述,由于利用仅由驾驶员获得的信息进行疏忽判定,所以不能排除有无法根据例如路面状况进行适当的判定的可能性。另一方面,在专利文献2中,只不过是使本车辆的碰撞预测时间短于预定时间且使驾驶员的视线方向不是障碍物的方向时的该预定时间可变,并没有使相对于本车辆有碰撞风险的障碍物本身的基准变化。
12.本发明是鉴于上述课题为一例而做出的,其目的在于,提供一种能够根据各种行驶环境(路面状态)而对驾驶员适当地提示有无危险驾驶(瞌睡或分心等)的车辆的控制装置。
13.技术方案
14.为了解决上述课题,本发明的一个实施方式的搭载于车辆的控制装置具有:(1)驾驶员状态值检测单元,其检测出驾驶员的状态值;路面状态检测单元,其检测出路面状态;阈值设定单元,其确定基于所述驾驶员的状态值而判定为危险驾驶的状态的判定阈值;危险驾驶判定单元,其在所述驾驶员的状态值处于超过了所述判定阈值的范围内预定时间以
上时判定为危险驾驶;以及判定阈值可变单元,其基于所述路面状态而使所述判定阈值可变。
15.另外,在上述(1)所述的车辆的控制装置中,(2)优选的是,阈值设定单元以所述驾驶员正对的前方为基准,在左右和/或上下以各预定的角度来划分安全范围与疏忽范围。
16.另外,在上述(2)所述的车辆的控制装置中,(3)优选的是,所述判定阈值可变单元根据所述路面状态,在位于所述驾驶员的左侧的安全范围的区域与位于所述驾驶员的右侧的安全范围的区域,使彼此的值域不同。
17.另外,在上述(1)~(3)中任一项所述的车辆的控制装置中,(4)优选的是,在所述车辆转弯时,所述判定阈值可变单元以使对应于转弯侧的所述判定阈值成为与所述转弯侧相反一侧的判定阈值不同的范围的方式,使所述判定阈值可变。
18.另外,在上述(1)~(4)中任一项所述的车辆的控制装置中,(5)优选的是,所述判定阈值可变单元以使所述车辆在高速公路行驶时与在一般道路行驶时彼此不同的方式,使所述判定阈值可变。
19.技术效果
20.根据本发明,能够根据各种的行驶环境而对驾驶员适当地提示有无危险驾驶。
附图说明
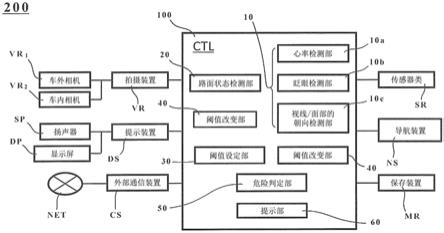
21.图1是车辆整体的功能框图。
22.图2是示出驾驶员的左右视线或面部的左右朝向的安全范围与疏忽范围的示意图。
23.图3是示出驾驶员的上下视线或面部的上下朝向的安全范围与疏忽范围的示意图。
24.图4是基于行驶路面的温度、凹凸以及水分量而示出路面状态的判别的例子的示意图。
25.图5是示出与行驶环境相对应的安全范围与疏忽范围的设定例其一的示意图。
26.图6是示出与行驶环境相对应的安全范围与疏忽范围的设定例其二的示意图。
27.图7是示出根据路面状态而选择的判定阈值表格的一例的示意图。
28.图8是示出根据路面状态而选择的判定阈值表格的其他一例的示意图。
29.图9是示出对驾驶员提示有无危险驾驶的危险驾驶判定方法的流程图。
30.符号说明
31.100 控制装置
32.10 驾驶员状态值检测部(驾驶员状态值检测单元)
33.20 路面状态检测部(路面状态检测单元)
34.30 阈值设定部(阈值设定单元)
35.40 阈值改变部(判定阈值可变单元)
36.50 危险判定部(危险驾驶判定单元)
37.60 提示部(提示单元)
38.200 车辆
39.vr 拍摄装置
40.ds 提示装置
41.cs 外部通信装置
42.sr 传感器类
43.ns 导航装置
44.mr 保存装置
具体实施方式
45.接下来,对用于实施本发明的优选的实施方式进行说明。另外,针对除以下详细描述以外的构成,也可以适当补全包括公知的各种车载传感器在内的公知的车辆结构和/或系统。例如,在驾驶员的视线检测和/或注视区域的判定中,只要不与本实施方式的主旨相反,就能够适用在日本特开2008-018853号公报和/或日本特开2013-255168号公报等示例的视线追踪技术。
46.<车辆200>
47.图1是示出本实施方式的车辆200的功能框图。以下,虽然在本实施方式中,作为优选的车辆而示例四轮驱动的汽车,但是只要不妨碍本发明的主旨也可以适用于二轮车或除车以外的飞机等。
48.车辆200构成为包括拍摄装置vr、提示装置ds、外部通信装置cs、传感器类sr、导航装置ns、保存装置mr以及控制装置100等。
49.在本实施方式中,拍摄装置vr包括车外相机vr1和车内相机vr2。其中,车外相机vr1是由能够获取车辆200行驶的路面的图像或能够拍摄车辆200的周围的一个或多个相机构成的公知的车外拍摄用的车载相机。期望这样的车外相机vr1以能够拍摄车外的全方位的方式分别具有横摇机构和/或纵摇机构等公知的倾斜机构。应予说明,倾斜机构不一定是必须的,例如也可以以能够分别独立地拍摄前后左右的方式由多个广角相机构成。
50.另外,车内相机vr2由用于拍摄乘员的面部的一个或多个相机构成。应予说明,虽然在本实施方式中只要至少能够拍摄驾驶员的面部即可,但是也可以检测乘坐于车辆200的各乘员的视线。在这样的情况下,优选如驾驶位用、副驾驶位用、左后部座位用、右后部座位用那样,以与乘员每个人对应的方式设置多个车内相机vr2。这样的车内相机vr2能够适用通过可视光或红外线来获取乘员的面部图像的公知的车内相机。
51.在本实施方式中,提示装置ds构成为包括车载的公知的扬声器sp和显示屏dp。其中,显示屏dp可以兼用作后述的导航装置ns的监视器。另外,本实施方式的提示装置ds可以构成为,能够与乘员所具有的智能手机等移动设备进行近距离无线通信。
52.外部通信装置cs能够示例出例如如下公知的通信装置,该通信装置能够利用使用上述智能手机的数据包通信、或以连接的服务为代表的下一代的汽车无线通信技术来进行与外部的各种信息通信。由此,也能够经由例如因特网等公知的网络net来进行各种信息通信。
53.传感器类sr包括各公知的检测车辆的速度的速度传感器和/或检测加速度的加速度传感器、或者检测转向机构的转角(转向角)的转向角传感器等公知的车载传感器。作为传感器类sr的一例,本实施方式的车辆200优选具备检测后述的路面的路面温度的路面温度传感器、能够检测路面的凹凸的凹凸检测传感器以及能够检测路面的水分量的水分量传
感器。
54.应予说明,作为检测路面温度的路面温度传感器,可以适用例如如日本特开2015-038516号公报所示例的公知的各种温度传感器。另外,作为能够检测路面的凹凸的凹凸检测传感器,可以适用例如日本特开2004-138549号所公开的装置(路面的凹凸检测传感器)和/或日本特开2013-61690号公报所记载的公知的各种方法和/或装置。另外,作为能够检测路面的水分量的水分量传感器,能够适用例如如日本特开2006-46936号公报所示例的公知的各种水分量检测传感器。
55.另外,作为传感器类sr的其他一例,本实施方式的车辆200优选具备能够计算路面的摩擦系数的摩擦系数计测传感器。作为这样的摩擦系数计测传感器,能够适用例如日本特许第5843833号和/或日本特许第6413902号所示例的公知的各种测定设备。
56.导航装置ns内置有用于获取车辆的位置信息的gps装置、地域名称以及建筑物等地图信息。
57.保存装置mr能够示例出例如公知的硬盘驱动器和/或非易失性存储器等,并且安装有后述的判定阈值表格等各种数据库、危险驾驶判定程序或者其他公知的车载用程序,并对其进行管理、保存。
58.<控制装置100>
59.接下来,对本实施方式的车辆200的控制装置100的构成进行详细说明。
60.如图1所示,本实施方式的控制装置100是具备运算单元和内存等的公知的电脑,并且构成为包括驾驶员状态值检测部10、路面状态检测部20、阈值设定部30、阈值改变部40、危险判定部50以及提示部60。
61.作为本发明的驾驶员状态值检测单元,驾驶员状态值检测部10具备检测出驾驶员的状态值的功能。在此,驾驶员的状态值是本实施方式所示的为了判定有无危险驾驶而必须的参数,也可以说是“与驾驶员的注意程度相关的动作的动作范围”。作为驾驶员的状态值的具体例,能够示例出例如驾驶员的视线、驾驶员的面部朝向、驾驶员的心率、以及驾驶员的眨眼数,但是不限于此,只要是在判定危险驾驶时进行与驾驶员的注意程度相关的动作就能够适用。
62.应予说明,对于驾驶员的视线和/或面部的朝向而言,适当地使用上述的车内相机vr2等,能够从驾驶员的面部图像提取出视线的方向和/或面部的朝向。对于如此的驾驶员的视线、面部的朝向的检测的具体方式而言,能够适用不特别限制的公知的解析技术,例如如日本特开2013-255168号公报所说明的那样,除能够参照“小野泰弘,冈部孝弘,佐藤洋一,“来自低分辨率图像的视线方向推定”,电子信息通信学会论文志,vol.j90-d,no.8,p.2212-2222,2007”等以外,还能够利用使用了面部的特征点提取的视线和/或面部的朝向的检测等现有的解析技术。
63.作为本发明的路面状态检测单元,路面状态检测部20具备检测车辆200行驶的路面的状态(路面状态)的功能。作为更具体的路面状态检测部20,可以基于从例如上述的路面温度传感器、路面凹凸检测传感器以及路面水分量传感器接收的信息,从图4所示的矩阵数据中设定(判定)路面状态。
64.即,如图4所示,路面状态检测部20保持从被预先矩阵化的路面温度、路面凹凸以及路面水分量之间的关系中导出的四个状态值(干燥、潮湿、雪地、冰地)。并且,在车辆200
行驶时,路面状态检测部20能够判定是基于来自上述各传感器的分别实测的路面温度、路面凹凸以及路面水分量的数据的哪个状态。
65.应予说明,虽然本实施方式的路面状态检测部20从上述温度、凹凸以及水分量之间的关系预先划分为四个状态并判定是哪个状态,但是路面状态的判定方法不限于该方式。例如,在车辆200具备能够计测上述路面的摩擦系数的装置和/或传感器的情况下,可以根据该计测到的摩擦系数来划分路面状态。
66.而且,在以摩擦系数的大小来划分路面状态的情况下,不限于上述四个状态,能够将数值范围更加细分来划分区域。在这样的情况下,能够对例如后述的安全范围sz与疏忽范围cz的判定阈值以线性的方式进行可变控制,或者在通过隧道时等行驶环境明显变化的情况下也能够缓和地进行可变控制。
67.作为本发明的阈值设定单元,阈值设定部30具备确定状态的判定阈值的功能,所述状态的判定阈值是基于所述的驾驶员的状态值而判定为危险驾驶的状态的判定阈值。更具体而言,本实施方式的阈值设定部30以所述的驾驶员正对的前方为基准,在左右和/或上下以各预定的角度来划分安全范围与疏忽范围。
68.在图2中示出驾驶员dr的左右视线上的安全范围sz与疏忽范围cz,在图3示出驾驶员dr的上下视线上的安全范围sz与疏忽范围cz。应予说明,虽然以下以驾驶员dr的视线为基准而分别划分安全范围sz与疏忽范围cz,但是当然也可以检测出驾驶员dr的面部的朝向来代替上述视线,以面部的朝向为基准也同样地划分安全范围sz与疏忽范围cz。
69.如图2所示,就座于车辆200所具备的座席st的驾驶员dr在观察前方p的同时操作方向盘h而驾驶车辆200。此时,在本实施方式中,以前方p为基准而在左右仅按预定的角度来规定安全范围sz,在该安全范围sz的外侧,在以边界(l-ex、r-ex)为界一直到水平轴hx为止的范围分别设定有各疏忽范围cz(左侧疏忽范围l-cz、右侧疏忽范围r-cz)。
70.因此,若例如驾驶员dr的视线进入安全范围sz,则判定为没有危险驾驶的风险,并且若超过判定阈值(上述边界)而滞留在疏忽范围cz预定时间以上则判断为是危险驾驶。
71.如此地划分安全范围sz与疏忽范围cz的边界(l-ex、r-ex)相当于本实施方式的判定阈值。应予说明,疏忽范围cz的端部也可以不扩展到水平轴hx而扩展到驾驶员dr的后方侧。
72.在本实施方式中,安全范围sz被定义为,只要不过度地集中,驾驶员dr在驾驶时可以使视线滞留的区域。该安全范围sz以前方p为基准而被划分为右侧安全范围r-sz和左侧安全范围l-sz。应予说明,对于上述安全范围sz的具体角度而言,能够根据车辆的种类(轿车、suv、轻型汽车等)或者支柱的位置或大小来获取各种值,因此能够通过实验或模拟来设定。
73.另一方面,对于疏忽范围cz而言,在本实施方式中也被定义为若通常地将视线滞留则使事故等风险提高的区域。应予说明,对于上述疏忽范围cz的具体角度而言,也能够根据车辆的种类(轿车、suv、轻型汽车等)或者支柱的位置或大小来获取各种值,因此也能够通过实验或模拟来设定。
74.另外,虽然在本实施方式中,安全范围sz与疏忽范围cz以边界ex为界而连续,但是不限于该方式,也可以介入能够获得任一状态的缓冲区域。在设置了如此的缓冲区域的情况下,可以在例如从疏忽范围cz起经由缓冲区域而再次返回疏忽范围cz时搁置后述的步骤
5的疏忽范围cz内的滞留时间而累积计算计时。
75.同样地,如图3所示,就座于车辆200所具备的座席st的驾驶员dr在观察前方p的同时操作方向盘h而驾驶车辆200。此时,在本实施方式中,以前方p为基准在上下仅按预定的角度来分别规定安全范围sz(上侧安全范围up-sz、下侧安全范围ud-sz)。另外,在该安全范围sz的外侧,以边界(up-ex、up-ex)为界分别一直到垂直轴为止的范围分别设定有各疏忽范围cz(上侧疏忽范围up-cz、下侧疏忽范围ud-cz)。应予说明,疏忽范围cz的端部也可以不扩展到垂直轴vx而扩展到驾驶员dr的后方侧。
76.作为本发明的判定阈值可变单元,阈值改变部40具备基于所述路面状态检测部20检测出的路面状态的检测结果而使所述判定阈值可变的功能。更具体而言,本实施方式的阈值设定部30根据路面状态而使上述边界的位置可变。
77.在图5和图6中,作为一例而示出与阈值改变部40能够执行的行驶环境对应的判定阈值的可变方式。图5示出涉及左右方向的判定阈值的可变方式,图6示出上下方向上的判定阈值的可变方式。
78.如图5所示,路面状态检测部20检测出车辆200存在于四个(干燥、潮湿、雪地、冰地)的环境中的哪一个作为行驶环境。并且,在由路面状态检测部20判断为车辆200位于干燥状态的行驶环境时,阈值改变部40以将边界ex设定为(干燥)所示的位置的方式进行控制。
79.另一方面,在例如离开隧道等而天气变化为雨天时等,由路面状态检测部20判断为车辆200位于潮湿状态的行驶环境,阈值改变部40接受该情况而将边界ex的位置改变为(潮湿)所示的位置。由此,在例如晴天时(行驶环境为干燥时),即使驾驶员dr的视线稍微向左右移动也位于安全范围sz而不会判定为危险驾驶。
80.另一方面,因为在例如行驶环境如上所述地变化时,安全范围sz的范围相对性地变窄,所以即使是在干燥时不判定为危险驾驶的视线的位置,也可能根据情况而发生被判定为危险驾驶的情况。由此,在本实施方式中,由于根据行驶环境而使被判定为危险驾驶的状态变化,所以能够向驾驶员dr提示与环境相对应的适当的警告。
81.应予说明,对于上下方向上的判定阈值的可变方式而言,由于与上述左右方向的判定阈值的可变方式相同,所以省略其说明。
82.应予说明,阈值改变部40可以根据所述路面状态,在驾驶员dr的、位于左侧的安全范围的区域(左侧安全范围l-sz)与位于右侧的安全范围的区域(右侧安全范围r-sz)中使彼此的值域不同。具体而言,例如在右舵车的情况下,存在与驾驶员dr的右侧相比左侧更难以观察的情况。因此,例如,阈值改变部40可以以针对右侧安全范围r-sz而根据路面状态来使其范围变窄,但针对左侧安全范围l-sz而无论路面状态如何都设定为固定的范围(即,使边界ex不可变)的方式进行控制。
83.另外,在车辆200转弯时,阈值改变部40可以以使对应于转弯侧的判定阈值成为与转弯侧相反一侧的判定阈值不同的范围的方式,使所述判定阈值可变。具体而言,例如,在驾驶员dr向右转动方向盘h而进行右转弯时,也可以想到与驾驶员dr的左侧相比,不得不更宽广地确认右侧的安全情况。因此,例如,在车辆200向右转弯的情况下,阈值改变部40可以以针对左侧安全范围l-sz而根据路面状态使其范围变窄,但针对右侧安全范围r-sz而在无论路面状态如何都设定为固定的范围(即,使边界ex不可变)的方式进行控制。
84.另外,阈值改变部40也可以以使车辆200在高速公路行驶时与在一般道路行驶时彼此不同的方式,使所述判定阈值可变。具体而言,例如与在一般道路行驶时相比,在车辆200行驶于高速公路的情况下,停止距离变长。换而言之,也可以说与在一般道路行驶时相比,在如上所述的高速行驶时必须进一步提高安全性。因此,例如,阈值改变部40可以以在通过导航装置ns等而判定为车辆200正行驶于一般道路的情况下使边界ex不可变,而在判定为正在高速公路等进行高速行驶的情况下根据路面状态使边界ex可变的方式进行控制。
85.作为本发明的危险驾驶判定单元,危险判定部50具备在驾驶员dr的状态值(上述的视线、面部的朝向、心率或者眨眼数等)位于超过了所述判定阈值的范围内预定时间以上时判定为危险驾驶的功能。更具体而言,本实施方式的危险判定部50在上述驾驶员dr的状态值超过判定阈值预定时间以上而滞留在疏忽范围cz的情况下判定为是危险驾驶。
86.作为一例,在图7和图8中示出驾驶员dr的状态值与判定阈值之间的关系。图7示出根据路面状态而选择的涉及驾驶员dr的视线或面部的朝向的判定阈值表格的一例。另外,图8示出根据路面状态而选择的涉及驾驶员dr的心率或眨眼数的判定阈值表格的一例。
87.即,在图7中,根据行驶环境来划分并设定驾驶员dr的视线的安全范围sz。在本例中,规定了若驾驶员dr在左右和上下的各视线位于哪个角度则进入安全范围sz。在例如行驶环境(路面状态)为雪地的情况下,若在距前方p向左右
±
15度的范围内则被危险判定部50判定为处于安全范围sz内。另外,在例如行驶环境(路面状态)为干燥的情况下,若距前方p向上下超过
±
20度的范围则被危险判定部50判定为处于疏忽范围cz内。
88.另一方面,在驾驶员dr的状态值为心率和/或眨眼数的情况下,如图8所示例的那样,在保存装置mr内预先保存判定阈值数据表格。并且,通过例如安装于方向盘h的公知的脉搏计(未图示)和/或车内相机vr2等来计测行驶时的驾驶员dr的心率和/或眨眼数。
89.此时,在行驶环境(路面状态)为潮湿的情况下,若计测到的心率相对于基准值t而超过
±
15%则被危险判定部50判定为处于疏忽范围cz内。另外,在例如行驶环境(路面状态)为冰地的情况下,若计测到的眨眼数相对于基准值t在
±
5%以内,则被危险判定部50判定为处于安全范围sz内。
90.应予说明,对于上述心率和/或眨眼数的基准值t的设定而言,在没有特别限制的情况下能够适用公知的各种方法,例如,可以将开始乘车后几分钟以内的平均值设定为基准值t,也可以由驾驶员dr经由显示屏dp输入。
91.作为本发明的提示单元,提示部60具有向驾驶员dr提示表示由所述危险判定部50判定出的危险驾驶的警告。更具体而言,提示部60可以经由上述显示屏dp和/或扬声器sp,对驾驶员dr提示正在进行危险驾驶的意思的警告。应予说明,作为危险驾驶的提示方式,提示部60除利用声音和图像两者来提示以外,还可以选择利用声音或图像中的任一者来表示的方式、以及在不利用声音和图像来表示的情况下仅将该事实存储到保存装置mr中的方式中的任一方式。
92.<危险驾驶判定方法>
93.接下来,还参照图9,对本实施方式的控制装置100能够执行的对驾驶员提示有无危险驾驶的危险驾驶判定方法进行说明。
94.首先,在步骤1中,通过作为上述路面状态检测单元的路面状态检测部20检测出车辆200所行驶的路面状态。此时,路面状态检测部20通过上述传感器和/或摩擦系数计测装
置等来计测行驶环境,并且判定为例如路面状态为“潮湿”。
95.接着,在步骤2中,作为阈值设定单元的阈值设定部30参照被保存到保存装置mr的判定阈值表格来设定与“潮湿”状态相对应的边界ex。此时,在将心率和/或眨眼数用作驾驶员dr的状态值的情况下,同样地参照被保存到保存装置mr的判定阈值表格来设定与“潮湿”状态相对应的心率和/或眨眼数的边界ex。
96.接着,在步骤3中,作为驾驶员状态值检测单元的驾驶员状态值检测部10检测出驾驶员dr的状态值。应予说明,作为驾驶员dr的状态值,能够例如上述视线、面部的朝向、心率和眨眼数中的至少一者。在本例中,作为驾驶员dr的状态值的一例,检测驾驶员dr的视线。应予说明,在步骤3中,若无法检测驾驶员dr的状态值(在步骤3中为否),则返回步骤1而再次重复处理。
97.在步骤3中能够检测出驾驶员dr的状态值(在本例中为视线)的情况下,在接下来的步骤4中判定检测出的驾驶员dr的状态值是否在疏忽范围cz内。并且,在检测出的驾驶员dr的状态值不在疏忽范围cz内的情况下,再次返回步骤1而重复处理。
98.另一方面,在步骤4中驾驶员dr的状态值处于疏忽范围cz内的情况下,基于利用了公知的计时器(未图示)等的对时间的计测,判定驾驶员dr的状态值是否在疏忽范围cz内预定时间以上(步骤5)。应予说明,对于作为该滞留时间的预定时间而言,只要不脱离本实施方式的主旨就没有特别限制,能够适当设定为例如数秒等。
99.然后,在例如驾驶员dr的视线返回安全范围sz的情况下上述计时器中的计时被清零。应予说明,在设定有上述缓冲区域的情况下,也可以设为若驾驶员dr的视线从疏忽范围cz经由缓冲区域而再次返回疏忽范围cz则计时器中的计时从转移到上一次的缓冲区域时起再次重新开始。
100.然后,在步骤5中通过上述计时器等而判定为驾驶员dr的状态值已滞留在疏忽范围cz预定时间以上的情况下,在接下来的步骤6中提示部60作为上述提示单元,经由提示装置ds对驾驶员dr给予警告。
101.然后,在接下来的步骤7中判定发动机是否停止,在判定为发动机关断时本处理结束,另一方面,在车辆200仍然处于行驶中的情况下再次返回步骤1而重复上述处理。因此,在例如车辆200行驶中,在天气从雨天恢复为晴天时,由上述路面状态检测部20判定为路面状态为“干燥”而执行以后的处理。
102.根据如上所述的本实施方式的车辆200的控制装置100与危险驾驶判定方法,能够根据各种行驶环境而对驾驶员适当地提示有无危险驾驶。
103.应予说明,虽然如上所述那样,在参照附图的同时对本发明的优选实施方式进行了说明,但是本发明不限于该例。即,只要是本领域技术人员就能够对上述实施方式尝试进一步的修改是不言自明的,这些也自然属于本发明的技术范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
