技术特征:
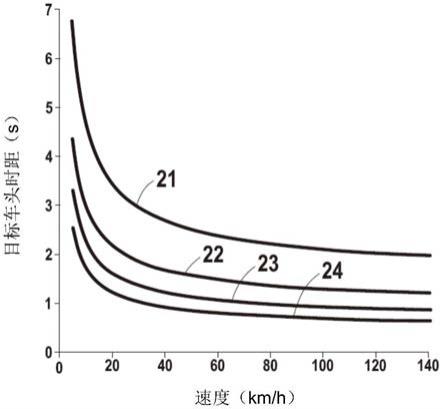
1.用于驾驶车辆的自适应巡航控制方法,包括步骤:获取所述驾驶车辆的速度(s),获取所述驾驶车辆与在所述驾驶车辆前方在同一车道上行驶的前方车辆之间的相对距离(d),基于将目标车头时距与驾驶车辆速度(s)相联系的关系,计算目标车头时距,车头时距是所述相对距离(d)与所述驾驶车辆速度(s)之间的比率,以及作为第一控制模式,基于所述目标车头时距来控制所述驾驶车辆的发动机(15)和/或制动器(16)。2.根据权利要求1所述的方法,其中,将所述目标车头时距与所述驾驶车辆速度(s)相联系的所述关系是以下类型的:thw
t
=a.s-b
c其中thw
t
是所述目标车头时距,s是所述驾驶车辆速度,并且a、b和c是正实数。3.根据权利要求2所述的方法,其中,在所述关系thw
t
=a.s-b
c中,项b介于0.5与1之间,优选地介于0.6与0.8之间。4.根据权利要求1至3中任一项所述的方法,其中,将所述目标车头时距与所述驾驶车辆速度(s)相联系的所述关系至少包括基于行为因子确定的项,所述行为因子依据驾驶员的行为是可调整的。5.根据权利要求2所述的方法,其中,在所述关系thw
t
=a.s-b
c中,项a和c基于以下关系确定:a=m1.b q1,以及c=m2.b q2其中b是依据驾驶员的行为可在0与100之间调整的行为因子,m1和q1是正实数,并且m2和q2是正实数。6.根据权利要求1至5中任一项所述的方法,还包括获取所述前方车辆的速度(s
pv
)的步骤,并且其中,仅当所述前方车辆速度(s
pv
)基本上等于所述驾驶车辆速度(s)时,才选择所述第一控制模式。7.根据权利要求6所述的方法,其中,当所述前方车辆速度(s
pv
)比所述驾驶车辆速度(s)高至少2km/h时或者当未检测到前方车辆时,在第三控制模式下控制所述驾驶车辆的所述发动机(15)和/或所述制动器(16),并且其中,在所述第三控制模式下,所述驾驶车辆速度(s)增加然后保持恒定在目标速度(s
t
)。8.用于驾驶车辆的自适应巡航控制系统,包括:驾驶车辆速度确定单元(12),其配置为确定所述驾驶车辆的速度(s),相对距离确定单元(11),其配置为确定所述驾驶车辆与在所述驾驶车辆前方在同一车道上行驶的前方车辆之间的相对距离(d),
计算单元(14),其配置为基于将目标车头时距与驾驶车辆速度(s)相联系的关系,计算目标车头时距,车头时距是所述相对距离(d)与所述驾驶车辆速度(s)之间的比率,以及控制单元(14),包括至少第一控制模式,在所述第一控制模式中基于所述目标车头时距来控制所述驾驶车辆的发动机(15)和/或制动器(16)。9.车辆,包括根据权利要求8所述的自适应巡航控制系统(1)。10.计算机程序,包括指令,所述指令用于当所述程序被计算机执行时,执行根据权利要求1至7中任一项所述的方法的步骤。11.记录介质,其能够由计算机读取并且在其上记录有根据权利要求10所述的计算机程序。
技术总结
用于驾驶车辆的自适应巡航控制方法,包括步骤:获取驾驶车辆的速度,获取驾驶车辆与在驾驶车辆前方在同一车道上行驶的前方车辆之间的相对距离,基于将目标车头时距与驾驶车辆速度相联系的关系,计算目标车头时距,车头时距是相对距离与驾驶车辆速度之间的比率,以及作为第一控制模式,基于目标车头时距来控制驾驶车辆的发动机和/或制动器。驶车辆的发动机和/或制动器。驶车辆的发动机和/或制动器。
技术研发人员:尼尔斯
受保护的技术使用者:丰田自动车欧洲公司
技术研发日:2019.07.29
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。