1.本发明属于北斗卫星导航、多波束测深、电子航道图在内河航运技术领域的应用,具体涉及了高精度北斗内河水路盲区航道预判系统。
背景技术:
2.在内河航运领域,水路的航道水文信息和实时可航水深区域是由航道局统一发布的。现有的技术多聚焦在航道的水文测量方面,如搭载在专门测量船上的多波束测深系统,主要用于海底地形测量、扫海测量和海上施工区域的测量,其每发射一个声脉冲,可以获得船下方的垂直深度,同时获得与船的航迹相垂直的面内的几十个水深值,从而实时绘出海底地貌图。如中国专利申请号为201210426725.8公开的一种基于电子航道图及水位数据的航道水深信息生成方法,基于长江电子航道图系统中的公共服务平台、网络通讯环境和船用终端应用系统,可实现定时计算长江干线航道水深信息,并以数据服务的方式提供给船用终端应用系统使用。又如中国专利申请号为201910057868.8公开的一种用于航道测量的声波探测装置及其使用方法,包括依次相连的多个漂浮探测仪以及监测台,所述漂浮探测仪包括漂浮板、设置在所述漂浮板下端的漂浮组件、转动设置在所述漂浮板上的旋转台以及设置在所述旋转台上方的支撑板;所述监测台包括主控制器、主无线收发器和显示屏,所述主控制器分别与所述主无线收发器和显示屏相连;该装置能够用于自动检测一定范围内的航道测量,能实现远程监控。
3.以上技术的不足之处在于:(1)系统庞大,需要专门的测量船和人力参与;(2)主要是针对水下三维地形图的绘制,后续处理繁琐;(3)多数针对现有航道进行水深探测,缺乏对航道之外的盲区进行水深探测。考虑到船舶航行时会因各种原因有偏离航道的情况,一种能够实时探测水深并迅速判断可航区域的船载终端是十分必要的。
技术实现要素:
4.本发明的目的在于针对现有应用领域的空白和功能的不够全面,提供一种适用于船舶日常搭载、安装简单、使用方便的盲区航道预判系统,当船舶偏离航道驶入盲区时,能够实时探测水深并判断哪个方向适合船舶航行,为船舶回归航道进行路线规划和导航。
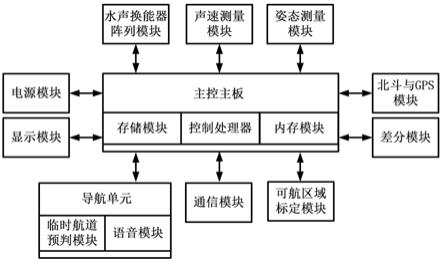
5.为了实现上述目的,本发明采用了以下技术方案:高精度北斗内河水路盲区航道预判系统,包括主控主板、电源模块、显示模块、水声换能器阵列模块、声速测量模块、姿态测量模块、北斗与gps模块、差分模块、航道标定模块、通信模块和导航单元;主控主板与电源模块、显示模块、水声换能器阵列模块、声速测量模块、姿态测量模块、北斗与gps模块、差分模块、航道标定模块、通信模块、导航单元相连接;所述的主控主板固化集成存储模块、控制处理器和内存模块。
6.所述的导航单元包括临时航道预判模块和语音模块。
7.所述的水声换能器阵列模块采用8个多波束水声换能器组成2
×
4阵列。
8.所述的声速测量模块采用表面声速计。
9.所述的姿态测量模块包括4个惯性测量传感器。
10.所述的北斗与gps模块采用支持北斗1、北斗2和gps的双模芯片。
11.所述的差分模块固化了坐标差分程序,能够对北斗、gps定位的绝对坐标值进行差分处理,使其与电子航道图的坐标空间保持一致。
12.所述的可航区域标定模块固化了水深标定和可航区域标定程序。
13.所述的通信模块支持gprs、3g、4g、5g通信功能,负责电子航道图最新版本的下载和数据回传。
14.本发明进一步说明,所述的存储模块采用大于64g的flash存储芯片,搭载嵌入式操作系统、电子航道图;所述的控制处理器采用嵌入式微处理器;所述的内存模块采用内置ram内存卡。
15.本发明进一步说明,所述的电源模块采用24v直流电源;所述的显示模块采用led显示屏,负责显示预判的临时航道和导航数据;所述的语音模块包括汉语、英语、日语、韩语、德语、法语和俄罗斯语。
16.本发明进一步说明,所述的水声换能器包括发射和接收功能。
17.本发明进一步说明,所述的临时航道预判模块负责从已标定可航区域的电子航道图中规划出临时航道线路,与语音模块、北斗与gps模块共同进行临时航道导航。
18.本发明的优点:1.使用便捷,普通船舶即可安装使用。
19.2.功能简单,仅针对当前船舶是否可航做出判断,不绘制地形图。
20.3.运算量小,当规划出整条通往预定航道的临时航道后,系统即可停止探测。
21.4.实时性强,探测、预判、规划和导航无缝衔接,及时指导船舶回归预定航道,提高行船安全。
附图说明
22.图1是本发明的结构框图。
具体实施方式
23.下面结合附图和最佳实施例对本发明进一步说明,但是本发明的保护范围不局限于以下实施例。
24.实施例:高精度北斗内河水路盲区航道预判系统,包括主控主板、电源模块、显示模块、水声换能器阵列模块、声速测量模块、姿态测量模块、北斗与gps模块、差分模块、航道标定模块、通信模块和导航单元;主控主板与电源模块、显示模块、水声换能器阵列模块、声速测量模块、姿态测量模块、北斗与gps模块、差分模块、航道标定模块、通信模块、导航单元相连接。
25.所述的主控主板固化集成存储模块、控制处理器和内存模块;所述的导航单元包括临时航道预判模块和语音模块;所述的水声换能器阵列模块采用8个多波束水声换能器组成2
×
4阵列,该多波束水声换能器包括发射和接收功能,参数为:频率8khz,传播距离1000米,(波速宽度)半功率角@-3db为120
°
锐度角180
°
;将水声换能器阵列模块部署在船舶底部。
26.所述的声速测量模块采用表面声速计,该声速计的参数为:测量范围1400m/s~1600m/s,分辨率0.001m/s,测量精度
±
0.05m/s(反射面距离50mm),声频率2mhz,采样速率(数据率)30hz。
27.所述的姿态测量模块包括4个惯性测量传感器,惯性测量传感器由陀螺仪和加速计组成,陀螺仪:量程
±
300deg/s,零偏≤0.08deg/s,零偏稳定性≤0.05deg/s,零偏重复性≤0.05deg/s,非线性≤0.05%;加速计:量程
±
10g,零偏≤5mg,零偏稳定性≤1mg,零偏重复性≤2mg。将姿态传感器分别部署在船头、船尾、左舷、右舷。
28.所述的北斗与gps模块采用支持北斗1、北斗2和gps的双模芯片,定位精度rtk:水平0.008 1ppm,垂直0.015 1ppm;dgnss:水平0.25m 1ppm,垂直0.50m 1ppm;sbas:水平0.50m,垂直0.85m;测向精度0.2
°
(1m基线),测速精度0.020m/s,差分数据rtcm2.x/3.x,crm。
29.所述的差分模块固化了坐标差分程序,能够对北斗、gps定位的绝对坐标值进行差分处理,使其与电子航道图的坐标空间保持一致。
30.所述的可航区域标定模块固化了水深标定和可航区域标定程序。
31.所述的通信模块支持gprs、3g、4g、5g通信功能,负责电子航道图最新版本的下载和数据回传。
32.所述的存储模块采用大于64g的flash存储芯片,搭载嵌入式操作系统、电子航道图,并负责存储所有水深数据、探测数据和历史数据。所述的控制处理器采用嵌入式微处理器;所述的内存模块采用内置ram内存卡。
33.所述的电源模块采用24v直流电源;所述的显示模块采用led显示屏,负责显示预判的临时航道和导航数据;所述的语音模块包括汉语、英语、日语、韩语、德语、法语和俄罗斯语。
34.所述的临时航道预判模块负责从已标定可航区域的电子航道图中规划出临时航道线路,与语音模块共同进行临时航道导航。
35.当船舶在航道中航行时无需启动本发明,当船舶偏离航道进入盲区时,启动本发明。水声换能器阵列模块和声速测量模块对船舶四周水域进行水深探测;姿态测量模块负责测量船在航行时纵横摇摆的幅度。水声换能器阵列模块和声速测量模块在探测水深时,控制处理器驱动北斗与gps模块同时进行定位,将水深数据与定位数据绑定。控制处理器采用姿态测量数据对水深数据进行修正,驱动差分模块对定位数据进行差分处理。控制处理器将修正后的水深数据和经过差分处理后的定位数据传送给可航区域标定模块。可航区域标定模块依据定位数据将水深数据标记在电子航道图上,再根据船舶特征数据(重量、吃水深度等)判断该船舶的可航区域并在电子航道图上标记出来。临时航道预判模块从北斗与gps模块获取船舶目的地数据信息,结合电子航道图上已标定的可航区域,预判船舶从当前位置回归到预定航道的临时航道线路并在显示模块上显示出来。导航模块启动语音模块,结合北斗与gps模块联合对船舶进行盲区导航。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
