技术特征:
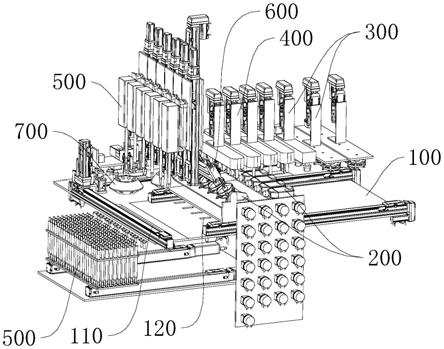
1.一种工件表面处理用喷粉机器人,包括底座(1)、机器人本体(5),其特征在于,所述底座(1)的顶端两侧均设置有限位块(4),两块所述限位块(4)之间分别设置有导轨(2)与夹持机构(15),所述导轨(2)的中部活动设置有活动块(3),所述活动块(3)的顶部固定连接有机器人本体(5),所述机器人本体(5)包括第一关节(6)以及驱动第一关节(6)的传动机构,所述第一关节(6)的底部为机座,且第一关节(6)的顶部通过传动机构转动连接有第二关节(7),所述第二关节(7)的中部通过传动机构横向连接一根横臂(8),所述横臂(8)的一端通过传动机构竖向连接第三关节(10),所述第三关节(10)的顶部设有集料仓(9),所述第三关节(10)的底部活动设置有喷枪本体(11),所述喷枪本体(11)的顶部设置有激光发射器(22),且喷枪本体(11)与夹持机构(15)相互对应。2.根据权利要求1所述的一种工件表面处理用喷粉机器人,其特征在于,所述第三关节(10)的底部固定连接有安装架(14),所述安装架(14)的一侧固定设置有两个相互平齐的对接件,所述安装架(14)的底端中部转动连接有转动轴(19),所述安装架(14)的一侧固定连接有第一电机(20),所述第一电机(20)的输出端与转动轴(19)的一端转动连接。3.根据权利要求2所述的一种工件表面处理用喷粉机器人,其特征在于,所述喷枪本体(11)的顶部一侧固定设置有转动件(21),所述转动件(21)的一侧设有连接臂与对接杆,所述喷枪本体(11)通过转动件(21)与转动轴(19)相互穿插,且对接杆与对接件固定连接。4.根据权利要求1所述的一种工件表面处理用喷粉机器人,其特征在于,所述激光发射器(22)的两侧固定设置有安装件,所述安装件的一侧固定设置有固定器(23),所述固定器(23)的中部与激光发射器(22)固定连接,且固定器(23)的两端与安装件相互固定,所述安装件的底部与喷枪本体(11)的顶部固定连接。5.根据权利要求1所述的一种工件表面处理用喷粉机器人,其特征在于,所述底座(1)的顶端一侧固定设置有两块隔板(17),两块所述隔板(17)的中部固定设有粉尘收集箱,所述粉尘收集箱的顶部两侧均设有支撑座(18),所述支撑座(18)的顶端固定设有中空板,所述中空板的顶部固定设有顶板(12)。6.根据权利要求5所述的一种工件表面处理用喷粉机器人,其特征在于,所述顶板(12)的底部固定安装有安装板(13),所述安装板(13)的中部一侧固定安装有液压缸(24),所述液压缸(24)的底端连接有定位架,所述定位架的两端均设有第二电机(25),所述第二电机(25)的输出端转动连接有固定框(27),所述固定框(27)呈中空形状。7.根据权利要求6所述的一种工件表面处理用喷粉机器人,其特征在于,所述固定框(27)的内部横向设置一根螺纹杆(28),所述固定框(27)的内部底端为长条中空状,所述螺纹杆(28)的一端与所述第二电机(25)的输出端固定连接,所述螺纹杆(28)的中部螺纹连接有活动件(29),所述活动件(29)穿透固定框(27)的内部底端。8.根据权利要求7所述的一种工件表面处理用喷粉机器人,其特征在于,所述活动件(29)的底部规定设置有夹紧臂(30),所述夹紧臂(30)的一侧固定设置有第三电机(26),所述第三电机(26)的输出端贯穿夹紧臂(30),且第三电机(26)的输出端固定连接有电动伸缩杆。9.根据权利要求8所述的一种工件表面处理用喷粉机器人,其特征在于,所述电动伸缩杆的输出端固定连接有定位杆(31),所述定位杆(31)包括一个驱动杆和限位条,所述驱动杆的一端与限位条的一端相互连接。
10.根据权利要求5所述的一种工件表面处理用喷粉机器人,其特征在于,所述支撑座(18)的内壁两侧均转动连接倾斜板(16),所述倾斜板(16)的一端通过转轴连接有缓震板(32),所述缓震板(32)的底部固定连接有工字件(33),多个工字件(33)的底部固定连接有缓震组,且缓震组的底部与粉尘收集箱的顶部固定连接。
技术总结
本发明公开了一种工件表面处理用喷粉机器人,包括底座、机器人本体,底座的顶端两侧均设置有限位块,两块限位块之间分别设置有导轨与夹持机构,导轨的中部活动设置有活动块,活动块的顶部连接有机器人本体,机器人本体包括第一关节以及驱动第一关节的传动机构,第一关节的顶部通过传动机构转动连接有第二关节,第二关节的中部通过传动机构横向连接一根横臂,横臂的一端通过传动机构竖向连接第三关节,第三关节的底部活动设置有喷枪本体。本发明将机器人与夹持工件区统一设置在同一个底板之上,且机器人本体可跟随导轨实现横向移动,便于后期对工件进行喷粉处理,提高工作效率,减少了因工件夹持不易的问题以及机器人移动不便的问题。问题。问题。
技术研发人员:姚方兴 熊立斌 熊立新
受保护的技术使用者:安徽柳溪智能装备有限公司
技术研发日:2021.11.08
技术公布日:2022/3/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。