技术特征:
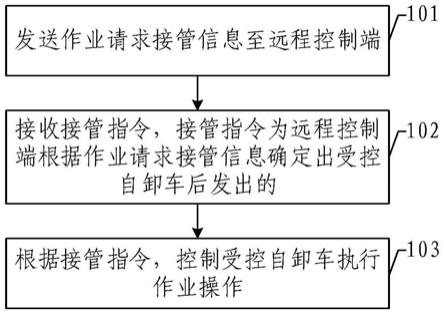
1.一种自卸车作业控制方法,其特征在于,所述方法包括:发送作业请求接管信息至远程控制端;接收接管指令,所述接管指令为所述远程控制端根据所述作业请求接管信息确定出受控自卸车后发出的;根据所述接管指令,控制所述受控自卸车执行作业操作。2.根据权利要求1所述的自卸车作业控制方法,其特征在于,所述接收接管指令之后,还包括:当确定所述远程控制端接管成功时,反馈所述接管成功的信息至所述远程控制端。3.根据权利要求1所述的自卸车作业控制方法,其特征在于,所述控制所述受控自卸车执行作业操作,包括:发送所述受控自卸车的作业现场环境信息至所述远程控制端;接收作业指令,所述作业指令为所述远程控制端确定所述受控自卸车的作业现场环境安全后发出的;根据所述作业指令,控制所述受控自卸车执行作业操作。4.根据权利要求3所述的自卸车作业控制方法,其特征在于,所述作业指令包括举升指令和复位指令;对应的,所述根据所述作业指令,控制所述受控自卸车执行作业操作,包括:发送举升指令至所述受控自卸车,控制所述受控自卸车进入举升状态;当所述举升状态对应的车斗举升至限定位置时,控制所述车斗停止举升,进入保持状态,并发送所述保持状态至所述远程控制端;接收复位指令,所述复位指令为所述远程控制端确定所述保持状态表示卸载完成后发送的;根据所述复位指令,控制所述车斗执行复位,以完成卸载操作。5.根据权利要求3所述的自卸车作业控制方法,其特征在于,所述根据所述作业指令,控制所述受控自卸车执行作业操作之前,还包括:检测所述受控自卸车的状态参数;根据所述状态参数,确定是否控制所述受控自卸车执行作业操作。6.根据权利要求5所述的自卸车作业控制方法,其特征在于,所述状态参数包括:车速信息、档位信息、手刹信息和车身姿态信息;对应的,所述根据所述状态参数,确定是否控制所述受控自卸车执行作业操作,包括:当所述车速信息为零、所述档位信息为停车档、所述手刹信息为已开且所述车身姿态信息为无倾斜时,确定控制所述受控自卸车执行作业操作。7.根据权利要求3所述的自卸车作业控制方法,其特征在于,所述根据所述作业指令,控制所述受控自卸车执行作业操作,还包括:当在执行作业操作过程中作业指令中断时,控制车斗动作执行机构保持当前状态;当作业指令中断恢复后,控制所述车斗动作执行机构根据所述作业指令由所述当前状态恢复至对应的卸载状态,以执行作业操作。8.根据权利要求1所述的自卸车作业控制方法,其特征在于,所述根据所述接管指令,控制所述受控自卸车执行作业操作之后,还包括:
接收退出接管指令,所述退出接管指令为所述远程控制端确定卸载操作完成之后发出的;根据所述退出接管指令,停止对所述受控自卸车的控制。9.一种自卸车作业控制装置,其特征在于,应用于车端控制器,包括:接管请求模块,用于发送作业请求接管信息至远程控制端;接管确定模块,用于接收接管指令,所述接管指令为所述远程控制端根据所述作业请求接管信息确定出受控自卸车后发出的;作业控制模块,用于根据所述接管指令,控制所述受控自卸车执行作业操作。10.一种自卸车作业控制系统,其特征在于,包括:车端控制器和远程控制端;所述车端控制器发送作业请求接管信息至远程控制端;所述远程控制端接收接管指令,所述接管指令为所述远程控制端根据所述作业请求接管信息确定出受控自卸车后发出的;所述车端控制器,用于根据所述接管指令,控制所述受控自卸车执行作业操作。11.一种自卸车,其特征在于,包括采用如权利要求1至8任一项所述自卸车作业控制方法执行作业操作。
技术总结
本发明提供一种自卸车作业控制方法、装置、系统及自卸车,方法通过发送作业请求接管信息至远程控制端;接收接管指令,所述接管指令为所述远程控制端根据所述作业请求接管信息确定出受控自卸车后发出的;根据所述接管指令,控制所述受控自卸车执行作业操作,由于接入了远程控制端,使得操作人员可以通过远程控制端远程控制自卸车进行卸载操作,保证了卸载过程的高效完成,同时也有效提高了无人驾驶自卸车无人卸载的可行性。卸车无人卸载的可行性。卸车无人卸载的可行性。
技术研发人员:刘振超 李纯袁 胡海龙
受保护的技术使用者:三一专用汽车有限责任公司
技术研发日:2021.11.15
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。