技术特征:
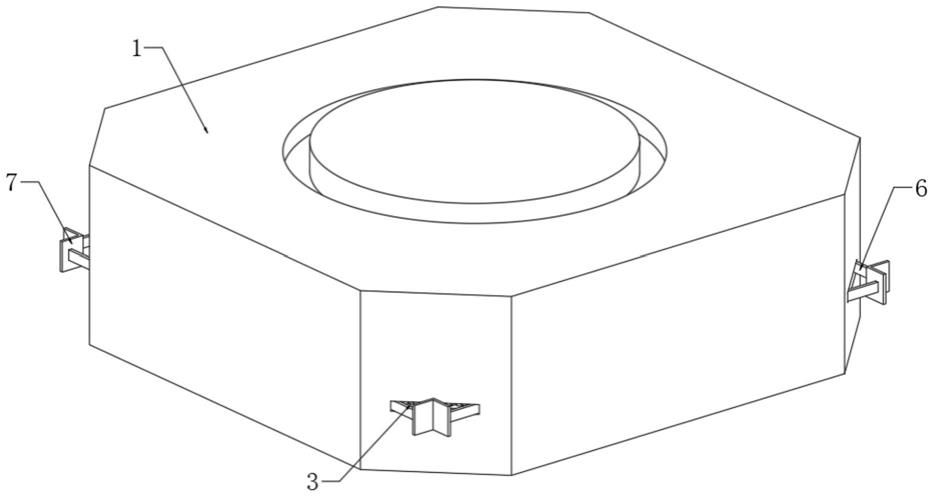
1.一种轮足结合式机器人,其特征是:该机器人的中间设为方形车架板,方形车架板的两侧中间和四角均连接有多节机械腿机构,多节机械腿机构的下端对称设有两支撑板,两支撑板形成支撑地面的支腿;方形车架四角连接的多节机械腿机构的两支撑板中部之间固定连接有电机,电机的轴从一侧支撑板上的圆孔伸出,伸出的轴上固定连接有行走轮,支腿的最下端距行走轮中心的垂直距离大于行走轮的半径。2.根据权利要求1所述的一种轮足结合式机器人,其特征是:所述多节机械腿机构的内端向外依次是舵机甲、u形连接件甲、u形连接件乙、舵机乙、u形连接件丙、舵机丙、支腿,舵机甲和方形车架板固定连接,u形连接件甲的两耳板固定连接在舵机甲两侧的输出轴上,u形连接件乙和u形连接件甲反向十字形固定连接,舵机乙两侧的输出轴和u形连接件乙的两耳板固定连接,u形连接件丙的横向板和舵机乙的外侧面固定连接,舵机丙两侧的输出轴和u形连接件丙的两耳板固定连接,形成支腿的两支撑板固定连接在舵机丙的两侧。3.根据权利要求2所述的一种轮足结合式机器人,其特征是:所述的u形连接件丙的两耳板设为斜板,支撑板设为一块向内弯折的弯折状支撑板。4.根据权利要求1所述的一种轮足结合式机器人,其特征是:所述的两支撑板下端之间固定连接有支撑体,该支撑体的下端面设有减震圆球。5.根据权利要求1所述的一种轮足结合式机器人,其特征是:所述的两支撑板之间设有用于加固连接的支撑横杆。6.根据权利要求1所述的一种轮足结合式机器人,其特征是:所述的方形车架板上表面设有用于形成甲壳虫状结构的装饰壳。
技术总结
一种轮足结合式机器人,该机器人的车架板两侧和四角均设有多节机械腿机构,多节机械腿机构由多个舵机和多个关节组成能够同时弯曲和转动的多自由度结构,支腿的最下端距行走轮中心的垂直距离大于行走轮的半径,因此支腿支撑在地面时行走轮不会和底面接触造成干涉,通过多个多节机械腿机构之间的配合形成昆虫爬行结构的机器人,来适应复杂地形的爬行作业,另外,四角的多节机械腿机构下端的支腿中部设有独立驱动的行走轮,这四个多节机械腿机构向内弯曲并相向转动后四个行走轮能互相平行的支撑地面,形成轮式行走结构的机器人,来适应较为平整路面的行走,效率更高;该机器人作业效率高、适应性强,有着广阔的市场前景。有着广阔的市场前景。有着广阔的市场前景。
技术研发人员:杨杰 张梁 岳松 刘迪一 吴俊辉 朱奕庚 袁珂佳 肖潇 张莹 王者然 关阳 李厂
受保护的技术使用者:华北水利水电大学
技术研发日:2021.11.11
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。