1.本实用新型涉及机器人技术领域,尤其涉及一种轮足结合式机器人。
背景技术:
2.爬行机器人是移动机器人的一种,爬行机器人按仿生学角度来分,可分为:螳螂式爬行机器人、蜘蛛式爬行机器人、蛇形机器人、尺蠖式爬行机器人等;按驱动方式来分可分为:气动爬行机器人、电动爬行机器人和液压驱动爬行机器人等;按工作空间来分可分为:管道爬行机器人、壁面爬行机器人和球面爬行机器人等;按功能用途可分为:焊弧爬行机器人、检测爬行机器人、清洗爬行机器人、提升爬行机器人、巡线爬行机器人和玩具爬行机器人;按行走方式可分为:轮式、履带式、蠕动式等。根据不同的驱动方式和功能等可以设计多种不同的结构和用途的爬行机器人,如气动管内检测爬行机器人、电磁吸附多足爬行机器人、电驱动壁面焊弧爬行机器人等,每一种形式的爬行机器人都有各自的应用特点。
3.现有的爬行机器人通常设有多个模仿昆虫腿的多节机械腿,通过多节机械腿的配合动作来模仿昆虫爬行,但是这种爬行机器人只适合在复杂地形环境下脚缓慢的爬行,不利于在平整地形环境下的快速爬行,为了改变这一现状,有必要设计一种轮足结合式机器人。
技术实现要素:
4.为了解决上述问题,本实用新型提出一种轮足结合式机器人。
5.本实用新型的技术方案是:一种轮足结合式机器人,其特征是:该机器人的中间设为方形车架板,方形车架板的两侧中间和四角均连接有多节机械腿机构,多节机械腿机构的下端对称设有两支撑板,两支撑板形成支撑地面的支腿;
6.方形车架四角连接的多节机械腿机构的两支撑板中部之间固定连接有电机,电机的轴从一侧支撑板上的圆孔伸出,伸出的轴上固定连接有行走轮,支腿的最下端距行走轮中心的垂直距离大于行走轮的半径。
7.优选的,所述多节腿机机构的内端向外依次是舵机甲、u形连接件甲、u形连接件乙、舵机乙、u形连接件丙、舵机丙、支腿,舵机甲和方形车架板固定连接,u形连接件甲的两耳板固定连接在舵机甲两侧的输出轴上,u形连接件乙和u形连接件甲反向十字形固定连接,舵机乙两侧的输出轴和u形连接件乙的两耳板固定连接,u形连接件丙的横向板和舵机乙的外侧面固定连接,舵机丙两侧的输出轴和u形连接件丙的两耳板固定连接,形成支腿的两支撑板固定连接在舵机丙的两侧。
8.优选的,所述的u形连接件丙的两耳板设为斜板,支撑板设为一块向内弯折的弯折状支撑板。
9.优选的,所述的两支撑板下端之间固定连接有支撑体,该支撑体的下端面设有减震圆球。
10.优选的,所述的两支撑板之间设有用于加固连接的支撑横杆。
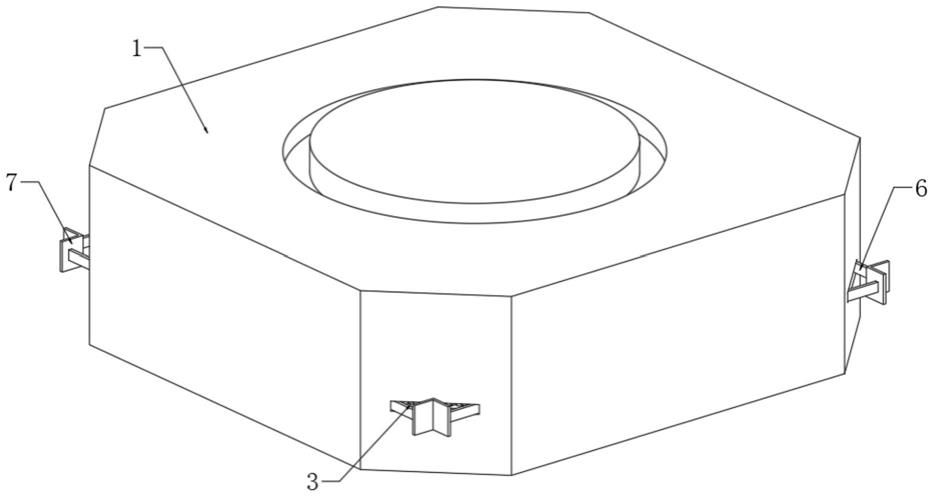
11.优选的,所述的方形车架板上表面设有用于形成甲壳虫状结构的装饰壳。
12.本实用新型的有益技术效果是:一种轮足结合式机器人,这种机器人的方形车架板两侧和四角均设有多节机械腿机构,多节机械腿机构由多个舵机和多个关节组成能够同时弯曲和转动的多自由度结构,支腿的最下端距行走轮中心的垂直距离大于行走轮的半径,因此支腿支撑在地面爬行时,行走轮不会和底面接触造成干涉,通过多个多节机械腿机构之间的配合形成昆虫爬行结构的机器人,来适应复杂地形的爬行作业,另外,四角的多节机械腿机构下端的支腿中部设有电机驱动的行走轮,这四个多节机械腿机构向内弯曲并相向转动后四个行走轮能互相平行的支撑地面,形成轮式行走结构的机器人,来适应较为平整路面的行走,效率更高;该机器人能够根据不同的地形变身成为爬行式或轮式的机器人,作业效率高、适应性强,有着广阔的市场前景。
附图说明
13.图1是该机器人爬行结构的立体结构示意图;
14.图2是图1去除装饰板后的俯视结构示意图;
15.图3是该机器人行走结构的立体结构示意图;
16.图4是图3的主视结构示意图;
17.图5是该机器人多节机械腿机构的立体结构示意图;
18.图6是该机器人多节机械腿机构的主视结构示意图;
19.图7是该机器人多节机械腿机构安装行走轮后的立体结构示意图;
20.图8是该机器人多节机械腿机构安装行走轮后的主视结构示意图。
21.图中,11.形车架板、111.装饰壳、12.多节机械腿机构、121. 支腿、1211.支撑板、122.电机、123.行走轮、124.舵机甲、125.u形连接件甲、126. u形连接件乙、127. 舵机乙、128. u形连接件丙、129.舵机丙、130.支撑体、131.减震圆球、132.支撑横杆。
具体实施方式
22.实施例一,参见说明书附图1
ꢀ‑ꢀ
8,一种轮足结合式机器人,该机器人的中间设为方形车架板,方形车架板的两侧中间和四角均连接有多节机械腿机构,多节机械腿机构的下端对称设有两支撑板,两支撑板形成支撑地面的支腿;
23.方形车架四角连接的多节机械腿机构的两支撑板中部之间固定连接有电机,电机的轴从一侧支撑板上的圆孔伸出,伸出的轴上固定连接有行走轮,通过电机驱动行走轮独立的转动,支腿的最下端距行走轮中心的垂直距离大于行走轮的半径,因此支腿支撑在地面爬行时,行走轮不会和底面接触造成干涉,支腿向内收起时后,行走轮能够支撑在地面。
24.所述多节腿机机构的内端向外依次是舵机甲、u形连接件甲、u形连接件乙、舵机乙、u形连接件丙、舵机丙、支腿,舵机甲和方形车架板固定连接,该舵机甲的输出轴和方形支架板垂直,通过舵机甲驱动多节腿机机构转动,u形连接件甲的两耳板固定连接在舵机甲两侧的输出轴上,u形连接件乙和u形连接件甲反向十字形固定连接,舵机乙两侧的输出轴和u形连接件乙的两耳板固定连接,u形连接件丙的横向板和舵机乙的外侧面固定连接,舵机丙两侧的输出轴和u形连接件丙的两耳板固定连接,通过舵机乙和舵机丙来驱动多节腿机机构向内弯曲,实现多节腿机机构弯曲和转动的多自由度结构,形成支腿的两支撑板固
定连接在舵机丙的两侧。
25.所述的u形连接件丙的两耳板设为斜板,设置斜耳板用于增加下方的支撑板向内的弯曲幅度,支撑板设为一块向内弯折的弯折状支撑板,弯折的支撑板用来模仿昆虫的关节,能够提升机器人的爬行效果和行进效率。
26.所述的两支撑板下端之间固定连接有支撑体,该支撑体的下端面设有减震圆球,支撑体作为支腿的支撑脚且能起到加固两支撑板的作用,减震圆球用于减缓爬行过程中地面对机器人的冲击力,保护了机器人的各个部件,各个结构更加稳定、使用寿命长。
27.所述的两支撑板之间设有用于加固连接的支撑横杆,支撑杆用于加固两支撑板之间的连接,使两支撑板形成的支腿更加牢固,所述的方形车架板上表面设有用于形成甲壳虫状结构的装饰壳。
28.本实用新型的工作过程是:
29.在复杂崎岖的地形作业时,通过各个舵机驱动多节机械腿机构向外展开,支腿的最下端距行走轮中心的垂直距离大于行走轮的半径,因此支腿支撑在地面爬行时,行走轮不会和底面接触造成干涉,多个多节机械腿机构之间的配合形成昆虫爬行结构的机器人,多个多节机械腿机构交替向内弯曲向前爬行,这种机器人结构不受地形的限制,能够顺利爬行通过;在较为平坦的地形作业时,通过各个舵机驱动多节机械腿机构向内弯曲,四个行走轮互相平行支撑在地面,形成轮式行走结构的机器人,来适应较为平整路面的行走,效率更高。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。