1.本发明涉及制动领域,并且更具体地,涉及一种用于制动交通工具的轮子的装置。本发明尤其适用于飞行器起落架的轮子的制动。
背景技术:
2.为了使交通工具减速、停止或保持静止,通常在制动踏板上施加压力以引起制动系统的运行。制动系统通常包括制动器,制动器安装在交通工具的轮子上并利用在压力作用下接触的两个表面之间的摩擦原理。
3.对于给定的踏板下压或转动,压力通常首先在交通工具的每个制动器上是相同的,然后独立地调节每个制动器,以在每个轮子上产生最佳制动扭矩而不会锁止它们。
4.这种制动系统是可靠和有效的,但它们呈现的缺点是导致在产生的制动扭矩和施加到每个轮子的压力之间的很大差异,特别是在制动操作的开始和结束之间、在新的制动器和磨损的制动器之间、在一个制动器与另一个制动器之间
……
5.还认识到,这种类型的制动系统在低速时比在高速时要有效得多,尽管在高速时制动性能是最关键的。因此,制动系统的低速响应显得不成比例,并引起较大的应力,这需要加大承载制动器的结构的尺寸。
6.然而,飞行器的轻量化已成为所有飞行器制造商不可回避的目标,尤其是为了降低飞行器的燃料消耗。特别地,环境标准要求减少污染物排放,尤其是减少二氧化碳(co2)排放。
7.非常有效的制动装置在文献fr-a-3044432和fr-a-3044296中公开。
技术实现要素:
8.本发明的目的是提出一种简单的制动系统,同时稳健且可靠,并且能够至少部分地消除上述缺点。
9.为此,本发明提供了一种用于制动轮子的制动装置,该装置包括:
[0010]-制动器,该制动器至少包括第一致动器和第二致动器,它们布置成将制动扭矩施加到轮子;
[0011]-控制系统,该控制系统布置成根据所需的制动值分别控制第一致动器和第二致动器;以及
[0012]-至少第一制动扭矩传感器,该第一制动扭矩传感器布置成向控制单元提供由制动器施加到轮子的制动扭矩的第一测量值。
[0013]
根据本发明,控制系统布置成在由第一传感器测量的制动扭矩超过预定制动扭矩极限的情况下,中断第一致动器的控制或第二致动器的控制。
[0014]
这种制动装置使得能够以简单的方式提供保护以免受例如由于致动器之一的故障而导致的过大制动扭矩。
[0015]
在第一实施例中,控制系统包括电子控制单元,该电子控制单元布置成将第一控
制信号递送到第一致动器并且将第二控制信号递送到第二致动器。电子监控单元布置成当由第一传感器测量的制动扭矩超过预定制动扭矩极限值时防止递送第一控制信号或第二控制信号。
[0016]
监控单元因此能够限制实际施加到轮子的制动扭矩。这种布置特别有利,因为它使得能够限制控制单元失效的影响(例如由于确定控制信号的计算机程序中的错误)。
[0017]
在第二实施例中,控制系统包括布置成将第一控制信号递送到第一致动器的第一独立控制单元和布置成将第二控制信号递送到第二致动器的第二独立控制单元。
[0018]
这种布置使得控制系统能通过根据第一控制单元或第二控制单元是否已经失效来中断对第一致动器或第二致动器的控制,以限制由制动器施加到轮子的制动扭矩。在过大扭矩的情况下,每个单独的电子控制单元能够非常快速地释放由其控制的致动器产生的力,例如由于另一个控制单元的失效,从而限制了由作为整体的制动装置所施加的过大扭矩。
[0019]
特别地,控制系统包括伺服控制回路,用于应用根据所需制动值和由第一传感器测量的制动扭矩两者的控制关系来控制第一致动器和第二致动器。
[0020]
伺服控制回路因此能精细地控制由制动器施加在轮子上的制动扭矩,并因此特别是确保在制动时耗散的能量在设有这种制动装置的交通工具的各种轮子之间的更好分布。
[0021]
特别地,制动值代表制动控制仪器的运动幅度,比如制动踏板的运动幅度。
[0022]
特别地,第一致动器和第二致动器是机电的。
[0023]
在变型中,第一致动器和第二致动器是液压致动器。
[0024]
特别地,第二扭矩传感器布置成向控制系统提供由制动器施加到轮子的制动扭矩的第二测量值。
[0025]
使用两个制动扭矩传感器用作通过使施加到轮子的制动扭矩的测量加倍来使装置更加可靠。
[0026]
有利地,在这种情形下,第一制动扭矩传感器和第二制动扭矩传感器是不同的技术。
[0027]
这限制了两个制动扭矩传感器对相同干扰的敏感度或经受相同类型的失效的风险,使得两个制动扭矩传感器同时失效的概率较低。这提高了本发明的制动装置的安全性。
[0028]
本发明还涉及一种起落架,该起落架包括至少一个设有这种制动装置的轮子。
[0029]
本发明还涉及一种包括这种起落架的飞行器,并且更具体地涉及一种客机。
附图说明
[0030]
鉴于以下描述将更好地理解本发明,该描述仅是说明性而非限制性的,并且必须参照附图阅读它,附图中:
[0031]
[图1]图1是具有起落架的飞行器的简化示意图,起落架带有轮子,轮子设有本发明的制动装置;
[0032]
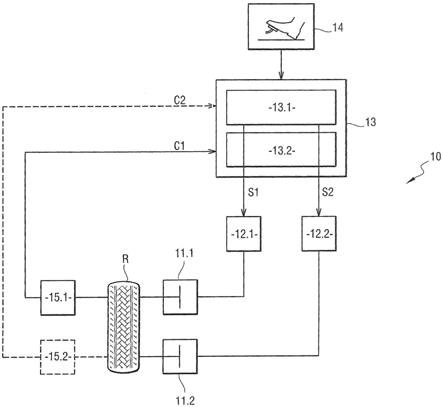
[图2]图2是本发明的第一实施例中的制动装置的框图;以及
[0033]
[图3]图3是本发明的第二实施例中的制动装置的框图。
具体实施方式
[0034]
如图1所示,飞行器a具有两个主起落架l,每个主起落架l均承载所谓的“制动”轮r,即,配备有用于在飞行器a在地面上时制动飞行器a的相应制动器。本说明书涉及单个制动轮r,但本发明当然以相同的方式应用于飞行器a的所有或一些制动轮r。
[0035]
参照图2并且在本发明的第一实施例中,用于制动轮子r的致动装置10包括用于制动飞行器a的制动器。该制动器以已知的方式包括至少一个第一致动器11.1和第二致动器11.2,将它们布置成按压一叠制动盘,以便在轮子r上施加制动扭矩并因此减慢轮子的旋转。在该示例中,第一致动器11.1和第二致动器11.2是具有相同容量的液压致动器。当第一致动器11.1和第二致动器11.2同时在制动盘上施加它们各自能够产生的最大压力时,获得最大制动扭矩。
[0036]
第一致动器11.1连接到第一液压伺服阀12.1的输出部并且第二致动器11.2连接到第二液压伺服阀12.2的输出部。第一伺服阀12.1和第二伺服阀12.2分别向第一致动器11.1和第二致动器11.2递送来自液压单元的加压流体,从而能够控制第一致动器11.1和第二致动器11.2的相应位置。
[0037]
第一伺服阀12.1和第二伺服阀12.2连接到控制系统13。通常,控制系统13包括电子控制单元13.1,电子控制单元13.1布置成分别将第一控制信号s1和第二控制信号s2递送到第一伺服阀12.1和第二伺服阀12.2。电子控制单元13.1布置成根据飞行器的飞行员压下制动踏板14来制备第一信号s1和第二信号s2,使得第一信号s1和第二信号s2代表制动踏板14的压下。为此,电子控制单元13.1在存储器中包括使信号s1、s2与制动踏板的下压相关的一个或多个控制关系。
[0038]
控制系统13连接到第一制动扭矩传感器15.1,并且它包括电子监控单元13.2,该电子监控单元13.2布置成获取由第一传感器15.1提供的第一测量值c1,并且连续地将其与预定制动扭矩极限值进行比较。当电子监控单元13.2检测到由第一传感器15.1提供的第一测量值c1超过预定制动扭矩极限值时,将电子监控单元13.2布置为阻止将第一控制信号s1递送到第一伺服阀12.1或阻止将第二控制信号s2递送到第二伺服阀12.2。
[0039]
因此,电子监控单元13.2能够中断第一致动器11.1或第二致动器11.2的任何不合时宜的控制,并因此提供保护以免受尤其是由于电子控制单元13.1的失效引起的任何过大扭矩。
[0040]
可选地,以类似于第一传感器15.1的方式,控制系统13可以连接到第二制动扭矩传感器15.2,第二制动扭矩传感器15.2布置在制动器上以向控制系统13提供由制动器施加在轮子r上的制动扭矩的第二测量值c2。添加第二传感器15.2用作确保电子监控单元13.2的制动扭矩测量的更好可用性,特别是在第一传感器15.1故障的情况下。添加第二传感器15.2还用作通过使其能够检测其中一个传感器的漂移来确保系统更好的可靠性。
[0041]
有利地,第一传感器15.1和第二传感器15.2不相似,即,它们是不同的技术,以便它们对相同的干扰不敏感或不会经受相同类型的失效。有利的是,将电子监控单元13.2布置成监控传感器15.1、15.2,并且可选地确定第一传感器15.1和第二传感器15.2中的哪一个提供了制动扭矩的错误测量值。作为示例,该方法可以包括将第一传感器15.1提供的第一测量值c1与第二传感器15.2提供的第二测量值c2进行比较,以及根据制动踏板14的下压分析第一测量值c1和第二测量值c2的变化。
[0042]
此外,电子控制单元13.1有利地布置成执行伺服控制回路,用于按照根据制动踏板14的压下和由第一传感器15.1提供的第一制动扭矩测量值c1和/或由第二传感器15.2提供的第二制动扭矩测量值c2的控制关系来递送第一控制信号s1和第二控制信号s2。
[0043]
因此,控制系统布置成将制动踏板的下压值转换成制动扭矩设定值,电子控制单元13.1使用该设定值来产生信号s1和信号s2。制动扭矩的测量既用作修改制动扭矩设定值以递送与制动踏板的下压值对应的制动扭矩,也用作如果制动扭矩测量值大于预定阈值通过停止馈送到致动器中的一个的流体来施加扭矩的限制。
[0044]
伺服控制回路用作控制由制动器施加在轮子上的制动扭矩,并且例如确保在制动期间耗散的能量在设有制动装置10的制动器的各种轮子r之间的更好分布。
[0045]
应当注意,控制系统13可以呈计算机处理单元的形式,该计算机处理单元通常包括至少一个处理器和存储器,该存储器包含由处理器执行以执行上述功能的控制程序和监控程序。替代地,控制系统13可以包括两个独立的电子电路,每个电子电路具有其自身的计算和存储设备,即布置成形成控制单元的一个电子电路和布置成形成监控单元的另一个电子电路。
[0046]
图3示出了本发明的第二实施例中的制动装置20。
[0047]
如上所述,制动装置20具有制动器,该制动器具有第一致动器21.1和第二致动器21.2,第一致动器21.1和第二致动器21.2布置成将制动扭矩施加到轮子r。第一致动器21.1连接到第一液压伺服阀22.1的输出部并且第二致动器21.2连接到第二液压伺服阀22.2的输出部。第一伺服阀22.1和第二伺服阀22.2连接到控制系统23,控制系统23布置成向所述第一伺服阀22.1递送第一控制信号s11并且向所述第二伺服阀22.2递送第二控制信号s12。信号s11、s12代表制动踏板24的下压。控制系统23还连接到布置在制动器上的第一制动扭矩传感器25.1,以向控制系统23提供由制动器施加在轮子r上的制动扭矩的第一测量值c11。
[0048]
制动装置20与制动装置10的不同之处在于控制系统23同时包括布置成递送第一控制信号s11的第一电子控制单元23.1和布置成递送第二控制信号s12的第二电子控制单元23.2。
[0049]
在由第一传感器25.1提供的制动扭矩的第一测量值c11超过预定制动扭矩极限值的情况下,第一电子控制单元23.1和第二电子控制单元23.2能分别起作用以中断第一控制信号s11和第二控制信号s12的递送。
[0050]
因此,控制系统23用作中断对第一致动器11.1或第二致动器11.2的控制,并因此提供保护以免受可能由于第一电子控制单元23.1或第二电子控制单元23.2的失效引起的任何过大扭矩。在过大扭矩的情况下,每个电子控制单元23.1、23.2能够非常快速地释放由其控制的致动器11.1、11.2所产生的力,例如由于另一个控制单元23.2、23.1的失效,从而限制了由作为整体的制动系统所施加的过大扭矩。
[0051]
以与制动装置10类似的方式,装置20可以可选地包括布置在制动器上的第二制动扭矩传感器25.2,以向控制系统13提供由制动器施加在轮子r上的制动扭矩的第二测量值c12。
[0052]
类似地,第一电子控制单元23.1和第二电子控制单元23.2可以可选地包括相应的伺服控制回路,用于根据制动踏板24的压下和制动扭矩的测量值两者来递送第一控制信号
s11和第二控制信号s12。对两个值的伺服控制的实现方式及其优点与第一实施例相同。
[0053]
当然,本发明不限于所描述的实施例,而是涵盖落入由权利要求书限定的本发明范围内的任何变型。
[0054]
尽管在该示例中第一致动器11.1、21.1和第二致动器11.2、21.2是液压的,但它们可以是机电的。于是较佳地提供连接到两个动力单元的控制单元,每个动力单元连接到相应的一个致动器。
[0055]
第一致动器11.1、21.1和第二致动器11.2、21.2可以是不同的类型。
[0056]
第一致动器11.1、21.1和第二致动器11.2、21.2不必具有相同的容量。
[0057]
致动器的数量可以大于两个。
[0058]
制动扭矩传感器的数量可以大于两个。
[0059]
尽管以上描述的两个实施例彼此独立地进行描述,但是它们也可以组合。
[0060]
尽管在该示例中制动装置是关于飞行器轮子进行描述的,但它也可以应用于汽车的制动轮,并且更一般地应用于交通工具的制动轮。
[0061]
制动设定点可以源自压下制动踏板或甚至源自激活任何其它控制构件,或甚至源自计算机。因此,制动设定点可以是由于飞行员选择“自动制动”制动模式导致的,其保证飞行器的恒定减速。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
