技术特征:
1.一种基于混合元启发算法优化anfis的auv协同定位方法,其特征在于,包括以下步骤:步骤1:领航auv与跟随auv进行水声测距,建立包含测距信息的系统状态空间模型;定义auv在k时刻的位置向量为x
k
=[λ
k
,l
k
]
t
,自身状态方程建立为:其中,δt为采样时间;λ
k
、l
k
分别为经度和纬度位置;w
k
=[w
l,k
,w
λ,k
]
t
为过程噪声向量;v
λ,k
、v
l,k
分别为auv在北向和东向上的速度分量,计算方法为:其中,θ
k
为航向角;v
k
、ω
k
分别为auv前向和侧向运动速度,由dvl得到;h
k
为深度信息;re(1-2e 3e
·
sin2l
k
)和re(1 e
·
sin2l
k
)分别为子午线和卯酉线的曲率半径;领航auv与跟随auv之间的相对距离为:其中,分别为领航auv的经度和纬度位置;为领航auv的深度;a
k
、b
k
、和定义为:系统的离散状态空间模型建立为:其中,过程噪声w
k-1
~n(0,q
k-1
)和量测噪声δ
k
~n(0,r
k
)均建模为高斯白噪声;q
k-1
为过程噪声协方差矩阵;r
k
为量测噪声协方差矩阵;f(x
k-1
,v
k
,ω
k
,θ
k
)=[l
k-1
δt
·vl,k
,λ
k-1
δt
·vλ,k
]为状态转移函数;量测函数;步骤2:在导航工作初期使用ackf估计得到anfis需要的特征数据集;步骤2.1:给定n维初始状态向量和初始误差协方差矩阵为:其中,x0为通过gps得到的跟随auv初始位置坐标;初始误差协方差矩阵p
0|0
根据gps定位精度结合经验进行设置;
步骤2.2:时间更新;步骤2.2.1:在第k步分解后验误差协方差阵;步骤2.2.2:生成容积点;步骤2.2.3:容积点传播;步骤2.2.4:预测状态量;步骤2.2.5:估计先验误差协方差;其中,s
k-1|k-1
是p
k-1|k-1
的cholesky分解阵;[1]
i
表示n维单位矩阵i的第i列向量;n表示状态量的维度;和p
k|k-1
分别为状态一步预测值和状态一步预测误差协方差矩阵;q为过程噪声协方差阵;步骤2.3:量测更新;步骤2.3.1:估计新息协方差;步骤2.3.1:估计新息协方差;步骤2.3.1:估计新息协方差;步骤2.3.1:估计新息协方差;步骤2.3.1:估计新息协方差;步骤2.3.2:构造自适应因子η
k
;其中,tr(
·
)为矩阵的迹,为新息矩阵,z
k
为水声测距得到的实时量测值;
步骤2.3.3:计算加入自适应因子η
k
后的新息协方差矩阵互协方差矩阵卡尔曼滤波增益卡尔曼滤波增益卡尔曼滤波增益卡尔曼滤波增益步骤2.3.4:估计后验状态量;步骤2.3.5:更新后验误差协方差;步骤2.4:最终得到anfis模型需要的输入信息为:其中,*为特征信息的标志;为滤波新息;为基于马氏距离构造的特征信息;步骤3:根据步骤2生成的数据,训练anfis-aqpso-ga模型隶属度参数,得到完整的预测模型;步骤4:使用ackf和anfis-aqpso-ga模型在线预测声学测距误差,对量测信息进行补偿修正;利用修正后的信息估计auv的位置状态预测值和状态误差协方差预测值。2.根据权利要求1所述的一种基于混合元启发算法优化anfis的auv协同定位方法,其特征在于:所述步骤3具体为:步骤3.1:搭建anfis模型;anfis使用模糊逻辑将高度互联的神经网络处理函数和输入特征信息转换为所需的输出;在anfis中,隶属函数是通过样本数据来给出的,函数相互组合或交互的方式称为规则,这些规则分为前件参数和后件参数;采用takagi-sugeno模糊系统模型,规则描述如下:规则1:if x=a1,y=b1,z=c
1 then f1=m1x p1y q1z r1规则2:if x=a2,y=b2,z=c
2 then f2=m2x p2y q2z r2规则3:if x=a3,y=b3,z=c
3 then f3=m3x p3y q3z r3式中,a
i
、b
i
和c
i
为模糊集合;m
i
、p
i
、q
i
和r
i
是结果参数,通常称为后件参数;anfis结构共有五层,每层都有许多具有特定功能的节点;anfis的模型结构由自适应网络和模糊推理系统合并而成,首先通过收集的样本数据提取初始模糊模型,而后根据梯度下降-最小二程混合算法改变系统参数,使系统的输出更贴近真实的输出;在反向传播中,固定后向参数,使用gd算法更新前件参数;在正向传播中,
固定前件参数,通过lse算法更新后件参数;第一层到第五层的每次迭代训练过程,可以让模型的输出误差向减小的方向发展,当达到预定的训练次数或误差范围内时,训练停止;在anfis模型中,第一层和第四层节点参数是自适应的,第二层和第三层节点参数固定,第五层为anfis为模型的输出;在学习算法的前向传递中,节点输出从第一层向前推进到第四层,后件参数由最小二乘确定;在反向传递过程中,误差信号从输出层反向传播到输入层,前件参数由梯度下降法调整;anfis通过此迭代自适应学习过程进行学习和训练,确定能够充分拟合训练数据的隶属度函数参数值,各层工作方式如下所述:第一层:模糊层;式中,o
1,i
为该层输出值;和为广义钟形隶属函数,定义为:式中,a
i
、b
i
和c
i
为被称为前件参数,其数值的改变影响隶属度函数;第二层:规则层;该层实现了模糊推理过程,每个节点的输出表示某一条规则的可信度;第三层:归一化层;第四层:去模糊层;第五层:输出层;在每一次迭代训练中,实际输出和期望输出的均方根误差会减小,当到达预定训练次数或误差范围时,停止训练;anfis系统的输入x、y、z在第一层进行模糊化,在第二层将隶属度函数相乘得到每个规则的激励强度,在第三层将每条激励强度做归一化,第四层和第五层的去模糊化后得到确切的输出,系统输出结果为每条规则的结果的加权平均;步骤3.2:采用aqpso-ga算法选取隶属度参数;为了解决传统的基于梯度下降法易陷入局部最优的问题,采取自适应量子粒子群aqpso算法进行参数选择,并混合ga进一步增强算法全局搜索能力;在qpso算法中,粒子的位置更新规则为:
式中,mbest
t
表示在第t次迭代时所有粒子最优位置的平均值;n为种群粒子数;d为粒子维度;p
ij,t
为p
ij,t
和g
j,t
之间的随机位置;p
ij,t
表示种群第i个粒子的第j维在第t次迭代时的最优位置;g
j,t
表示种群的全局最优解的第j维位置;和u
ij,t
均为[0,1]之间的随机数;x
ij,t
表示第i个粒子的第j维在第t次迭代时的位置;β
t
是qpso重要参量,是收缩-扩张系数,用以控制qpso算法的收敛速度,设置为数,用以控制qpso算法的收敛速度,设置为其中,β
i,t
表示在第t次迭代时第i个粒子的收缩-扩张系数;f
i
表示第i个粒子的适应度值;f
gbest
表示全局最优解g
t
对应粒子的适应度函数,适应度函数选取为:其中,m为样本数;为在第i次迭代参数下fis计算的预测结果;表示训练数据集中第m个样本数据。3.根据权利要求2所述的一种基于混合元启发算法优化anfis的auv协同定位方法,其特征在于:所述步骤3.2中采用ga算法优化粒子更新的规则为:步骤3.2.1:设定aqpso算法中的种群粒子个数和取值范围并赋初值,确定寻优参数的维数和变化范围;步骤3.2.2:将aqpso算法中当前种群内的全部粒子视作ga算法中的染色体,计算每个染色体对应的适应度值;步骤3.2.3:以适应度值为评价指标,收集最佳染色体;步骤3.2.4:利用aqpso算法对当前种群中的粒子进行全局的初步搜索,通过式(29)~(31)对种群中粒子的位置进行更新;步骤3.2.5:利用ga算法对step4中更新不充分的粒子进行初始化编码,对编码化的种群粒子进行交叉算子操作;步骤3.2.6:完成交叉算子操作后,需要对当前种群中的所有染色体进行变异算子操
作;步骤3.2.7:对当前更新后的粒子群中的每个粒子,再次计算出各自对应的适应度值,并根据适应度值更新p
i,t
和g
t
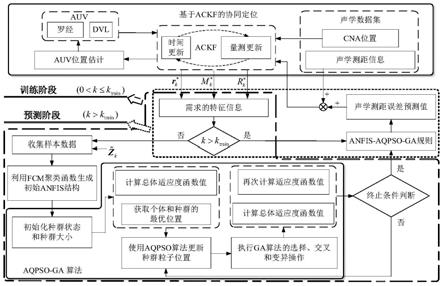
;步骤3.2.8:以达到设定的最大迭代次数或全局最优解误差满足系统需要为终止条件。4.根据权利要求1所述的一种基于混合元启发算法优化anfis的auv协同定位方法,其特征在于:所述步骤4中基于anfis-aqpso-ga的协同定位方法分为训练过程和预测过程两个部分:在0<k≤k
train
时间段,anfis-aqpso-ga算法处于训练过程,主要工作为收集用于训练anfis模型参数的样本数据,并在k
train
时刻开始训练;在使用aqpso-ga算法训练anfis模型的过程中,根据anfis模型隶属度函数,初始化一个规模与隶属度函数的参数数量相同的粒子群,根据步骤3.2对种群中粒子的位置进行更新,而ga算法在连续的迭代中进行选择、交叉和变异操作,直到达到最大迭代数或全局最优解误差满足系统需要时停止训练,得到anfis-aqpso-ga规则;在k>k
train
时,假设所有auv与cna因工作需要,需深入水下航行,无法再接收到各航行器的gps位置信息,即无法获得auv与cna之间的基准距离,anfis-aqpso-ga算法进入预测过程;在预测过程中,以每一时刻的和作为输入数据,通过anfis-aqpso-ga模型预测声学测距误差,对通过声学调制解调器得到的测量距离z
k
进行闭环修正,最后利用修正后的声学距离信息估计auv的位置状态预测值和状态误差协方差预测值。
技术总结
本发明属于水下多航行器协同导航技术领域,具体涉及一种基于混合元启发算法优化ANFIS的AUV协同定位方法。本发明基于AQPSO-GA方法训练的ANFIS-AQPSO-GA模型具有更好拟合输入输出数据的能力。训练好的ANFIS-AQPSO-GA模型能在实时工作环境中,对丢失量测信息进行补偿,对异常量测信息进行修正,大大降低协同导航整体估计误差,提升长航时缺少基准位置条件下的定位精度。本发明采用ANFIS-AQPSO-GA结构设计的预测结构对协同定位方法本身计算复杂度无明显影响,能满足实时动态条件下的计算需求,且有效提升了协同定位算法的鲁棒性和定位精度。位精度。位精度。
技术研发人员:徐博 矫名羽 李盛新 赵玉新 吴磊 王权达 郭瑜 王朝阳 王连钊
受保护的技术使用者:哈尔滨工程大学
技术研发日:2021.11.30
技术公布日:2022/3/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。