1.本发明涉及医疗器械,尤其是涉及一种能够空间定位的探头及三维图像构建方法。
背景技术:
2.体内介入超声成像主要是利用超声探头介入到人体体内,对血管、消化道、支气管、心脏等体内组织的进行成像,目前常见的超声成像探头是利用一根软轴带动前端的超声元件转动进行成像,如ivus、ice、支气管超声、消化超声等超声探头;软轴能进行转动,但无法实现弯曲,灵活性不够,所以,在进入一些不规则的腔道或是需要对一些不规则的组织进行成像时,现有的超声探头会面临较大的困难。
3.此外现有的超声探头体积过大、定位精度不准。
技术实现要素:
4.为了克服现有技术的不足,本发明的目的之一在于提供一种能够空间定位的探头,探头前端能够弯折,使不规则的组织能够成像,并且体积小、定位精度高。
5.为了克服现有技术的不足,本发明的目的之二在于提供一种利用能够空间定位的探头进行三维图像构建的方法,使不规则的组织能够成像。
6.本发明的目的之一采用如下技术方案实现:
7.一种能够空间定位的探头,包括介入探头、导管、拉丝以及成像换能器,所述成像换能器安装于所述导管端部,所述拉丝安装于所述导管的侧壁,所述能够空间定位的探头还包括操控手柄,所述拉丝端部安装于所述操控手柄,所述操控手柄带动所述拉丝拉伸或放松使所述导管端部弯折。
8.进一步的,所述导管为中空结构,所述导管内部用以安装所述成像换能器的电缆。
9.进一步的,所述拉丝的数量为四个,四个所述拉丝均匀分布于所述导管的侧壁,四个所述拉丝分别控制所述导管端部上、下、前、后的弯折。
10.进一步的,所述介入探头还包括位置传感器,所述位置传感器固定于所述导管末端,所述位置传感器对所述成像换能器的绕自身的旋转角度进行检测。
11.进一步的,所述操控手柄包括驱动件以及收卷装置,所述拉丝一端固定于所述收卷装置并缠绕于所述收卷装置,所述驱动件控制所述收卷装置拉伸或放松所述拉丝。
12.进一步的,所述操控手柄还包括检测传感器,所述检测传感器检测所述收卷装置收卷的所述拉丝长度。
13.进一步的,所述操控手柄还包括控制电路,所述控制电路与所述检测传感器以及所述驱动件电信连接,所述控制电路根据所述检测传感器反馈的信号,通过所述驱动件控制所述收卷装置缠绕所述拉丝的长度。
14.进一步的,所述能够空间定位的探头还包括成像主机,所述成像主机与所述控制电路以及成像换能器电信连接,所述成像主机通过所述控制电路实现对所述拉丝长度的控
制及检测,所述成像主机根据所述成像换能器获取的二维图像形成三维图像。
15.进一步的,所述拉丝为金属丝。
16.本发明的目的之二采用如下技术方案实现:
17.一种基于上述能够空间定位的探头的三维图像构建方法,包括以下步骤:
18.s1.获取所述成像换能器初始位置的二维图像;
19.s2.操控所述介入探头的端部在空间弯折;
20.s3.根据检测传感器的信息计算所述成像换能器空间相对位置,并获取二维图像;
21.s4.重复s2以及s3步骤,直至获得预设个数的空间相对位置以及对应的二维图像;
22.s5.根据预设个数的空间相对位置以及对应的二维图像构建三维图像;
23.s6.成像主机优化并显示三维图像。
24.相比现有技术,本发明能够空间定位的探头的拉丝安装于导管的侧壁,拉丝端部安装于操控手柄,操控手柄带动拉丝拉伸或放松使导管端部弯折,使不规则的组织能够成像并且整个探头体积小;位置传感器对成像换能器的绕自身的旋转角度进行检测,检测传感器检测收卷装置收卷的拉丝长度,根据检测传感器的信息计算成像换能器空间相对位置,定位精度高。
附图说明
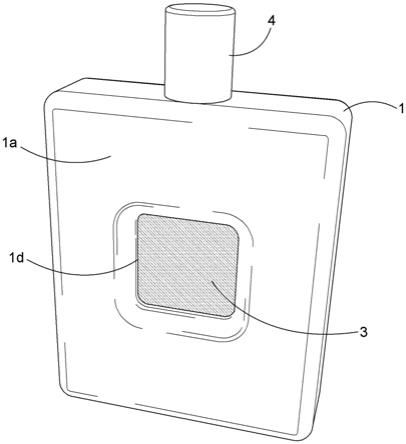
25.图1为本发明能够空间定位的探头的结构示意图;
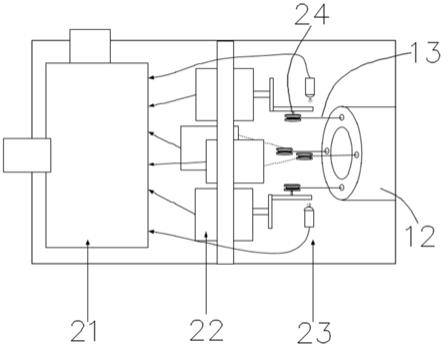
26.图2为图1的能够空间定位的探头的导管的内部结构示意图;
27.图3为图1的能够空间定位的探头的操控手柄的结构示意图;
28.图4为图1的能够空间定位的探头的相对位置分析图;
29.图5为图1的能够空间定位的探头在xoz平面内的运动分析图;
30.图6为本发明三维图像构建方法的流程图。
31.图中:10、介入探头;11、成像换能器;12、导管;13、拉丝;14、位置传感器;20、操控手柄;21、控制电路;22、驱动件;23、检测传感器;24、收卷装置;30、成像主机。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在另一中间组件,通过中间组件固定。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在另一中间组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在另一中间组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
34.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具
体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
35.图1至图3为本发明能够空间定位的探头,能够空间定位的探头包括介入探头10、操控手柄20以及成像主机30。
36.介入探头10包括成像换能器11、导管12、拉丝13以及位置传感器14。
37.成像换能器11能够获取当前位置的二维图像。
38.导管12为中空结构,成像换能器11安装于导管12的端部。成像换能器11的电缆收容于导管12并与操控手柄20连接。
39.拉丝13为金属丝,金属丝受力时形变小,对精度影响可以忽略不计。拉丝13分布于导管12的侧壁中。具体的,拉丝13的数量为四根,导管12呈圆柱形,四根拉丝13均匀分布于导管12,相邻两拉丝13与导管12轴线的连线形成的夹角为90度。四根拉丝13分别控制导管12端部上、下、前、后的弯折。
40.位置传感器14安装于导管12端部靠近成像换能器11处或直接安装在成像换能器11上。位置传感器14对成像换能器11的绕自身的旋转角度进行检测。位置传感器14可以采用超声、电磁等传感器。
41.操控手柄20包括控制电路21、驱动件22、检测传感器23以及收卷装置24。
42.控制电路21与检测传感器23以及驱动件22电信连接。控制电路21根据检测传感器23反馈的信号,通过驱动件22控制收卷装置24缠绕拉丝13的长度。
43.驱动件22驱动收卷装置24运动以收卷拉丝13。具体的,驱动件22为电机。
44.收卷装置24能够收卷拉丝13。具体的,收卷装置24为丝盘,拉丝13一端固定于收卷装置24,并能缠绕在收卷装置24上。驱动件22驱动收卷装置24转动以收卷拉丝13。
45.检测传感器23检测收卷装置24收卷的拉丝13的长度。
46.成像主机30与控制电路21以及成像换能器11电信连接,成像主机30通过控制电路21实现对拉丝13长度的控制及检测,成像主机30根据成像换能器11获取的二维图像形成三维图像。
47.使用能够空间定位的探头时,通过成像主机30的软件控制介入探头10的端部在空间弯折。在其他实施例中,也可以直接通过控制电路21控制介入探头10的端部在空间弯折。或者通过手动控制介入探头10的端部在空间弯折。根据检测传感器23的信息计算成像换能器11空间相对位置,并获取二维图像。
48.具体的,计算成像换能器11空间相对位置过程如附图4所示:成像换能器11在空间中的相对位置可以通过6自由度进行分析。包括相对xyz坐标的偏移的位置x',y',z'和在xoz平面内的旋转角度α,yoz平面内的旋转角度β,及绕自身旋转的选择角度γ。则成像换能器11的相对位置用f(x',y',z',α,β,γ)函数表示。
49.由于介入探头10自身的结构,仅在导管12部分的远端长度l0的部分可以在拉丝13的作用下实现弯曲,其中拉丝13是刚性的金属丝,忽略其自身的拉伸形变。以xoz平面内的运动做分析,如附图5所示。
50.在介入探头10自由状态下,上下拉丝13的长度相同,其中可弯折部分的程度为l0,在导管12弯折的过程中,其整体长度不会发生变化,即导管12的中心线值为定值,在操控手柄20的控制下,将上拉丝13长度变为l1,下拉丝13的长度变为l2,则成像换能器11的位置发
生变化,其位置f(x',z',α)可以根据初始位置f0及拉丝13的长度l1和l2的值计算得到。
51.则在xoz平面内的位置函数f(x',z',α)可用初始位置进行表示f0(l1,l2),其中拉丝13之间的距离为d,l1和l2与l0之间的关系满足公式:l1/α l2/α=2
×
l0/α
52.同样,可以分析在yoz平面内的相对位置函数,可以用左右拉丝13的长度l3,l4进行计算,即f(y',z',β)=f0(l3,l4)
53.因此综上所述,体内成像换能器11的相对位置可以通过其初始位置f0计算得到
54.f(x',y',z',α,β,γ)=f0(l1,l2,l3,l4,γ),其中l1/α l2/α=2
×
l0/α,l3/β l4/β=2
×
l0/β。
55.请继续参阅图6,本发明还涉及一种基于上述能够空间定位的探头的三维图像构建方法,包括以下步骤:
56.s1.获取成像换能器11初始位置的二维图像;
57.s2.操控介入探头10的端部在空间弯折;
58.s3.根据检测传感器23的信息计算成像换能器11空间相对位置,并获取二维图像;
59.s4.重复s2以及s3步骤,直至获得预设个数的空间相对位置以及对应的二维图像;
60.s5.根据预设个数的空间相对位置以及对应的二维图像构建三维图像;
61.s6.成像主机30优化并显示三维图像。
62.以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进演变,都是依据本发明实质技术对以上实施例做的等同修饰与演变,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。