1.本发明涉及卫星干扰力矩补偿技术领域,尤其涉及一种卫星稳定控制及干扰补偿方法。
背景技术:
2.卫星根据载荷不同,需要姿轨控分系统对卫星提供不同的平台控制策略,为卫星载荷工作提供一个稳定的平台。三轴对地姿态稳定控制的卫星,根据任务需求,在卫星上安装有一个或若干个绕固定轴转动且运动规律已知的转动或摆动部件(简称转动机构),该转动机构的特性不同,在工作时引入的干扰力矩也不同,频率可能高达几赫兹或者更高频率,力矩的大小会达到一个较大的级别,无法通过姿轨控分系统的闭环稳定控制进行吸收,对姿态稳定控制产生不可忽视的干扰力矩,降低卫星的姿态控制精度和稳定度。卫星的姿控分系统,在实现卫星的三轴对地稳定控制的同时,需要对该干扰力矩进行前馈补偿,减少或抵消干扰力矩,消除其对姿态控制的影响,实现卫星的高精度对地稳态控制。
3.对上述存在转动机构的卫星,传统的控制策略是忽视该干扰力矩,使得姿态稳定控制精度较低。部分卫星是通过在产生干扰力矩方向各安装一个用于补偿干扰力矩的飞轮,转动机构运动产生干扰力矩的同时,控制该方向的飞轮产生与干扰力矩大小相等方向相反的补偿力矩,用于补偿转动机构运动产生的干扰力矩。不考虑飞轮的备份冗余的前提下,在卫星平台上安装正交的三个反作用飞轮,用于卫星平台的稳定控制。如果干扰力矩在n个方向上存在,就需要安装n个飞轮用于补偿n个方向的干扰,即需要配置三个稳定控制飞轮及n个干扰力矩补偿飞轮。
4.对含有转动机构的卫星,传统的设计方法具有以下局限性:
5.(1)对转动机构产生的干扰力矩不进行补偿的卫星,受干扰力矩影响,姿态控制精度和稳定度降低。
6.(2)利用力矩补偿轮进行力矩补偿的卫星,除三轴的稳定控制飞轮外,需要至少配置n个用于干扰补偿的飞轮,需要投入的单机配套增加,造成卫星单机成本增加,造成整星的能耗增加,造成卫星的总质量增加,发射成本增加。
技术实现要素:
7.本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的在于提供一种卫星稳定控制及干扰补偿方法,在保证能够实现卫星的姿态稳定控制和干扰力矩补偿的前提下,有效简化卫星的系统单机配置,降低卫星成本,减轻卫星质量,降低发射成本。
8.为达到上述目的,本发明通过以下技术方案实现:
9.一种卫星稳定控制及干扰补偿方法,包括:步骤s1:在卫星三轴正交坐标系的各个坐标轴方向上分别安装一个双模式飞轮;步骤s2:确定卫星上的多个转动机构分别绕不同固定轴摆动产生的多个干扰力矩;步骤s3:每一所述双模式飞轮根据多个所述干扰力矩确
定自身所需输出的补偿转速;步骤s4:各个双模式飞轮根据自身确定的所述补偿转速驱动相应的飞轮电机进行干扰力矩补偿。
10.可选的,各个双模式飞轮还分别接收相应的姿控转速指令,以分别获取相应的姿控转速,并将各自接收的所述姿控转速与自身所需输出的所述补偿转速进行叠加,得到自身所需输出的实际转速,并通过所述实际转速驱动相应的飞轮电机进行卫星稳定控制及干扰力矩补偿
11.可选的,所述步骤s3包括:步骤s31:每一所述双模式飞轮接收各个干扰力矩对应的力矩模式码,并根据各个力矩模式码确定自身所需输出的与各个所述干扰力矩对应的力矩补偿分量;步骤s32:每一所述双模式飞轮将各个干扰力矩对应的所述力矩补偿分量进行积分,得到与各个力矩补偿分量对应的转速;步骤s33:每一所述双模式飞轮将各个转速进行叠加,以确定出自身所需输出的所述补偿转速。
12.可选的,所述步骤31包括:步骤s311:每一所述双模式飞轮根据各个力矩模式码查询相应的力矩模式表,以获取与各个所述干扰力矩分别对应的补偿力矩;步骤s312:每一所述双模式飞轮获取各个所述补偿力矩对应的加权系数;步骤s313:每一所述双模式飞轮根据各个所述加权系数和各个所述补偿力矩确定自身所需输出的与各个干扰力矩对应的力矩补偿分量。
13.可选的,每一双模式飞轮具有第一串口和第二串口,其中,所述第一串口的数量为1个,所述第一串口用于与星上计算机进行通讯;所述第二串口的数量与所述转动机构的数量相同,所述第二串口用于与对应的所述转动机构进行通讯。
14.可选的,所述星上计算机通过所述第一串口发送与所述第一串口所在的双模式飞轮对应的姿控转速指令;所述转动机构通过各个双模式飞轮上的第二串口发送所述转动机构绕不同固定轴摆动产生的各个干扰力矩所对应的各个力矩模式码。
15.可选的,所述力矩模式码包括补偿力矩的极性、力矩指令来源和力矩模式中的至少一种;其中,所述力矩模式包括补偿力矩的幅值、周期和作用时间。
16.可选的,每一所述双模式飞轮存储的力矩模式表相同,每一所述双模式飞轮能相互替换。
17.可选的,所述星上计算机通过所述第一串口与所述第一串口所在的双模式飞轮进行通讯时,先发送识别码,再发送相应的数据,所述第一串口所在的所述双模式飞轮识别所述识别码后,再响应相应的数据。
18.可选的,所述识别码为第一识别码时,相应的数据为所述姿控转速指令;所述识别码为第二识别码时,相应的数据为立即转速指令,其中,所述双模式飞轮接收到所述立即转速指令后,以所述立即转速指令对应的转速值进行双模式飞轮转速控制;所述识别码为第三识别码时,相应的数据为双模式飞轮返回信息请求指令;所述识别码为第四识别码时,相应的数据为补偿力矩信息上注修改请求指令。
19.本发明至少具有以下技术效果:
20.(1)本发明通过双模式飞轮,可响应姿态稳定控制的转速指令,同时对需要进行补偿的干扰力矩进行前馈补偿,减少或抵消干扰力矩,实现卫星的高精度对地稳态控制。
21.(2)本发明无需单独配置飞轮补偿干扰力矩,可简化需要力矩补偿的卫星的系统单机配置,降低卫星成本,减轻卫星质量,降低发射成本。
22.(3)本发明的双模式飞轮可同时使用双模式,进行姿态稳定控制和干扰力矩补偿;或者只使用其中的一种模式,仅作为姿态稳定控制或干扰力矩补偿,增加了卫星系统单机配置的灵活性。
23.(4)本发明可通过分别对不同的干扰力矩进行标定,提高干扰力矩的补偿效果。
24.(5)本发明的双模式飞轮存储的力矩模式表内容相同,通过力矩模式码进行区分,可遍历所有转动机构产生的所有干扰力矩,由此不同双模式飞轮可相互轮换,能够降低系统设计的复杂性。
25.本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
26.图1为本发明一实施例提供的卫星稳定控制及干扰补偿方法的流程图;
27.图2为本发明一实施例提供的任意指向的干扰力矩在各坐标轴上的投影示意图;
28.图3为本发明一实施例提供的两个载荷产生的三个力矩的矢量方向与投影示意图;
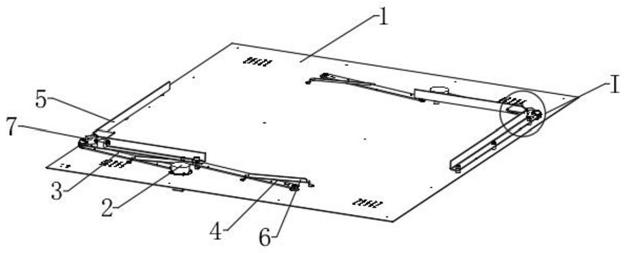
29.图4为本发明一实施例提供的双模式飞轮的安装示意图;
30.图5为本发明一实施例提供的双模式飞轮lx指令接收和转速叠加示意图;
31.图6为本发明一实施例提供的双模式飞轮ly指令接收和转速叠加示意图;
32.图7为本发明一实施例提供的双模式飞轮lz指令接收和转速叠加示意图;
33.图8为本发明一实施例提供的双模式飞轮指令接收和转速叠加总体示意图;
34.图9为本发明一实施例提供的双模式飞轮串口设计示意图;
35.图10为本发明一实施例提供的力矩模式码组成示意图。
具体实施方式
36.下面详细描述本实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
37.三轴对地姿态稳定控制的卫星含有已知运动规律的转动机构,该转动机构在工作时,会产生不可忽视且需要补偿的干扰力矩。所述卫星的控制系统,在对卫星三轴姿态稳定控制的同时需要对转动机构摆动时产生的干扰力矩进行补偿。
38.为达到上述目的,本实施例提供了一种卫星稳定控制及干扰补偿方法,以实现卫星的三轴稳态控制和干扰力矩的前馈补偿。
39.下面参考附图描述本实施例的卫星稳定控制及干扰补偿方法。
40.图1为本发明实施例提供的卫星稳定控制及干扰补偿方法的流程图。如图1所示,该方法包括:
41.步骤s1:在卫星三轴正交坐标系的各个坐标轴方向上分别安装一个双模式飞轮。
42.本实施例中,卫星三轴正交坐标系的各个坐标轴分别为滚动轴(记为x轴)、俯仰轴(记为y轴)和偏航轴(记为z轴)。卫星上具有转动机构如卫星载荷时,转动机构绕固定轴如ζ轴往复摆动,从而产生沿ζ轴方向的干扰力矩。为对该干扰力矩进行前馈补偿且实现卫星的
三轴稳态控制,可在不考虑卫星冗余设计的情况下,在卫星三轴正交坐标系的各个坐标轴方向上分别安装一个双模式飞轮。例如,在滚动轴(x轴)安装一个双模式飞轮lx,俯仰轴(y轴)安装一个双模式飞轮ly,偏航轴(z轴)安装一个双模式飞轮lz。
43.步骤s2:确定卫星上的多个转动机构分别绕不同固定轴摆动产生的多个干扰力矩。
44.具体的,转动机构在绕多个固定轴摆动时,会产生多个干扰力矩。以卫星上具有两个转动机构为例,分别记为第一转动机构和第二转动机构。其中,第一转动机构绕固定轴1和固定轴2摆动,第二转动机构绕固定轴1摆动。当第一转动机构绕固定轴1摆动时,产生第一干扰力矩,第一转动机构绕固定轴2摆动时,产生第二干扰力矩。第二转动机构绕固定轴1摆动时,产生第三干扰力矩。由此,可确定卫星上的第一转动机构和第二转动机构共产生了3个干扰力矩。
45.需要说明的是,转动机构在绕固定轴如ζ轴摆动时,会产生相应的实际干扰力矩,记为t。根据转动机构摆动的运动特性,t的大小可用曲线近似拟合,该干扰力矩的信息(包括幅值大小,方向和周期等)由转动机构的物理机械特性和转动特性标定得知,且能保证标定的精度。其中,标定值可视为与真实值相等。
46.在确定干扰力矩t之后,可将ζ轴上的该干扰力矩t分解投影到各个坐标轴上。具体的,干扰力矩t在x轴、y轴和z轴上的投影分量分别为tx、ty和tz。其中,投影分量与投影系数kx、ky和kz存在如下关系:tx=kxt;ty=kyt;tz=kzt。其中,所述的投影系数kx、ky和kz与空间角α、β和γ关系如下:kx=cosα;ky=cosβ;kz=cosγ。本实施例中,空间角α、β和γ分别为固定轴ζ轴与x轴、y轴和z轴的夹角。由此,可得到各个坐标轴上的双模式飞轮分别需要补偿的力矩分量为各投影分量即tx、ty和tz。
47.对于存在多个干扰力矩,各个双模式飞轮确定自身的补偿分量和相应的补偿转速的具体实施方式如下所述。
48.步骤s3:每一双模式飞轮根据多个干扰力矩确定自身所需输出的补偿转速。
49.其中,步骤s3包括:步骤s31:每一双模式飞轮接收各个干扰力矩对应的力矩模式码,并根据各个力矩模式码确定自身所需输出的与各个干扰力矩对应的力矩补偿分量。
50.需要说明的是,每一双模式飞轮具有第一串口和第二串口,其中,第一串口的数量为1个,第一串口用于与星上计算机进行通讯;第二串口的数量与转动机构的数量相同,第二串口用于与对应的转动机构进行通讯。
51.本实施例中,星上计算机通过第一串口发送与第一串口所在的双模式飞轮对应的姿控转速指令;转动机构通过各个双模式飞轮上的第二串口发送转动机构绕不同固定轴摆动产生的各个干扰力矩所对应的各个力矩模式码。
52.其中,每一双模式飞轮上的第一串口均具备接收与发送双向数据传输功能。每一双模式飞轮上有m路与转动机构通信的第二串口,如串口1,串口2,
…
串口m,第二串口具备接收数据功能。所述的通讯串口1,串口2,
…
串口m,用于与m个不同的转动机构q1,q2,
…
qm连接,其数据传输约定双模式飞轮直接接收转动机构的指令信息。其中,指令信息由识别码和相应的力矩模式码组成。
53.作为一个示例,在滚动轴(x轴)安装一个双模式飞轮lx,俯仰轴(y轴)安装一个双模式飞轮ly,偏航轴(z轴)安装一个双模式飞轮lz。若卫星具有2个转动机构,则双模式飞轮
lx、双模式飞轮ly和双模式飞轮lz上分别设有1个第一串口和2个第二串口。其中,三个双模式飞轮分别通过各自的第一串口与星上计算机进行通讯。若2个转动机构中的第一转动机构产生干扰力矩t1和t2,第二转动机构产生干扰力矩t3。此时,第一转动机构通过双模式飞轮lx、双模式飞轮ly和双模式飞轮lz上的第二串口(该第二串口与第一转动机构对应)向各个双模式飞轮发送干扰力矩t1、t2各自对应的力矩模式码,第二转动机构通过双模式飞轮lx、双模式飞轮ly和双模式飞轮lz上的第二串口(该第二串口与第二转动机构对应)向各个双模式飞轮发送干扰力矩t3对应的力矩模式码。
54.双模式飞轮lx接收到干扰力矩t1对应的力矩模式码后,根据该力矩模式码确定自身所需输出的与干扰力矩t1对应的力矩补偿分量t1x;双模式飞轮lx接收到干扰力矩t2对应的力矩模式码后,根据该力矩模式码确定自身所需输出的与干扰力矩t2对应的力矩补偿分量t2x;双模式飞轮lx接收到干扰力矩t3对应的力矩模式码后,根据该力矩模式码确定自身所需输出的与干扰力矩t3对应的力矩补偿分量t3x。类似的,双模式飞轮ly接收到干扰力矩t1对应的力矩模式码后,根据该力矩模式码确定自身所需输出的与干扰力矩t1对应的力矩补偿分量t1y;双模式飞轮ly接收到干扰力矩t2对应的力矩模式码后,根据该力矩模式码确定自身所需输出的与干扰力矩t2对应的力矩补偿分量t2y;双模式飞轮ly接收到干扰力矩t3对应的力矩模式码后,根据该力矩模式码确定自身所需输出的与干扰力矩t3对应的力矩补偿分量t3y。类似的,双模式飞轮lz按照上述方式分别得到t1z、t2z和t3z。
55.本实施例中,步骤s31包括:
56.步骤s311:每一双模式飞轮根据各个力矩模式码查询相应的力矩模式表,以获取与各个干扰力矩分别对应的补偿力矩;
57.步骤s312:每一双模式飞轮获取各个补偿力矩对应的加权系数;
58.步骤s313:每一双模式飞轮根据各个加权系数和各个补偿力矩确定自身所需输出的与各个干扰力矩对应的力矩补偿分量。
59.具体的,转动机构摆动的幅值大小、方向和周期等不同会产生不同的干扰力矩t1,t2,
…
tm,因此需要不同的补偿力矩t1',t2',
…
tm',所述的力矩模式码与补偿力矩一一对应,用于对双模式飞轮存储的力矩模式表进行查询。其中,力矩模式码包括补偿力矩的极性、力矩指令来源和力矩模式中的至少一种;其中,力矩模式包括补偿力矩的幅值、周期和作用时间。需要说明的是,力矩模式码低4位为1111b的力矩模式,其补偿力矩的信息,由地面通过
※
计算机通信串口上注。优选的,每一双模式飞轮存储的力矩模式表相同,每一双模式飞轮能相互替换,即所有的双模式飞轮存储的力矩模式表内容相同,通过力矩模式码可遍历所有转动机构的所有力矩模式。
60.本实施例中,转动机构在转动产生干扰力矩t的同时,将其对应的力矩模式码,发送到lx、ly和lz三个双模式飞轮,双模式飞轮根据收到的力矩模式码,查询存储器中的力矩模式表,找到与干扰力矩t相对应的补偿力矩t',其中,t'与t的大小相等,方向相反。双模式飞轮lx、ly和lz分别获取与补偿力矩t'对应的投影系数即加权系数,然后进行加权输出相应的力矩补偿分量,具体如下:
61.双模式飞轮lx与加权系数kx加权后,得出应输出的力矩补偿分量tx',tx'=kxt';
62.双模式飞轮ly与加权系数ky加权后,得出应输出的力矩补偿分量ty',ty'=kyt';
63.双模式飞轮lz与加权系数kz加权后,得出应输出的力矩补偿分量tz',tz'=kzt'。
64.需要说明的是,当干扰力矩不同时,由于干扰力矩位于固定轴方向,而投影系数即加权系数为固定轴与各个坐标轴在空间的夹角,因此当不同的干扰力矩位于同一固定轴方向上时,加权系数相同,位于不同固定轴方向上时,加权系数不同,所以需要获取各个补偿力矩(补偿力矩与干扰力矩一一对应)对应的加权系数。
65.由此,在存在多个干扰力矩如t1、t2和t3时,双模式飞轮lx、ly和lz可分别得到相应的补偿力矩t1'、t2'和t3'和相应的加权系数kx1、ky1、kz1,kx2、ky2、kz2,kx3、ky3、kz3。双模式飞轮lx、ly和lz根据各个所述加权系数kx1、ky1、kz1,kx2、ky2、kz2,kx3、ky3、kz3和各个所述补偿力矩t1'、t2'和t3'确定自身所需输出的与各个干扰力矩t1、t2和t3对应的力矩补偿分量。其中,双模式飞轮lx确定出的相应的力矩补偿分量为t1x'、t2x'和t3x';双模式飞轮ly确定出的相应的力矩补偿分量为t1y'、t2y'和t3y';双模式飞轮lz确定出的相应的力矩补偿分量为t1z'、t2z'和t3z'。
66.步骤s32:每一双模式飞轮将各个干扰力矩对应的力矩补偿分量进行积分,得到与各个力矩补偿分量对应的转速。
67.具体的,产生1个干扰力矩t的情况下,如上所述,双模式飞轮lx得出应输出的力矩补偿分量为tx',双模式飞轮ly得出应输出的力矩补偿分量为ty',双模式飞轮lz得出应输出的力矩补偿分量为tz'。然后,双模式飞轮lx、ly和lz分别对力矩补偿分量tx'、ty'和tz'进行积分,得出并输出相应的转速rtx,rty,rtz,用于补偿干扰力矩t在x轴、y轴和z轴上的分量,从而实现干扰力矩t的快速补偿。
68.本实施例中,当干扰力矩为多个干扰力矩t1、t2和t3时,双模式飞轮lx可对自身所需补偿的各个力矩补偿分量t1x'、t2x'和t3x'进行积分得到相应的转速rt1x、rt2x和rt3x;双模式飞轮ly可对自身所需补偿的各个力矩补偿分量t1y'、t2y'和t3y'进行积分得到相应的转速rt1y、rt2y和rt3y;双模式飞轮lz可对自身所需补偿的各个力矩补偿分量t1z'、t2z'和t3z'进行积分得到相应的转速rt1z、rt2z和rt3z。由此,各个双模式飞轮可得到与各个力矩补偿分量对应的转速。
69.步骤s33:每一双模式飞轮将各个转速进行叠加,以确定出自身所需输出的补偿转速。
70.具体的,若转动机构有m个,可同时产生m个干扰力矩t1,t2
…
tm。则采用步骤s31和s32所述的方法,可得到tn(下标n=1,2,
…
m,代表第n个干扰力矩)在双模式飞轮lx、ly和lz上的相应力矩补偿分量tnx'、tny'和tnz'(下标n=1,2,
…
m,代表第n个干扰力矩),以及应输出对应的转速rtnx,rtny,rtnz(下标n=1,2,
…
m,代表第n个干扰力矩)。
71.本实施例中,双模式飞轮lx确定出自身应输出用于补偿m个干扰力矩的补偿转速rtx为:rtx=rt1x rt2x
…
rtmx;双模式飞轮ly确定出自身应输出用于补偿m个干扰力矩的补偿转速rty为:rty=rt1y rt2y
…
rtmy;双模式飞轮lz确定出自身应输出用于补偿m个干扰力矩的转速rtz为:rtz=rt1z rt2z
…
rtmz。
72.步骤s4:各个双模式飞轮根据自身确定的所述补偿转速驱动相应的飞轮电机进行干扰力矩补偿。
73.具体的,双模式飞轮lx根据确定出的补偿转速rtx驱动其相应的飞轮电机进行m个干扰力矩补偿;双模式飞轮ly根据确定出的补偿转速rty驱动其相应的飞轮电机进行m个干扰力矩补偿;双模式飞轮lz根据确定出的补偿转速rtz驱动其相应的飞轮电机进行m个干扰
力矩补偿。
74.在本发明的一个实施例中,所述方法还包括:各个双模式飞轮还分别接收相应的姿控转速指令,以分别获取相应的姿控转速,并将各自接收的姿控转速与自身所需输出的补偿转速进行叠加,得到自身所需输出的实际转速,并通过实际转速驱动相应的飞轮电机进行卫星稳定控制及干扰力矩补偿。
75.具体的,如上所述,星上计算机通过第一串口可发送与第一串口所在的双模式飞轮对应的姿控转速指令,即在正常飞行过程中,星上计算机,将卫星三轴姿态稳定控制所需的三个姿控转速指令rwx、rwy和rwz,分别通过各个双模式飞轮上的第一串口发送至相应的双模式飞轮lx、ly和lz上,以使双模式飞轮lx、ly和lz分别根据rwx、rwy和rwz转速指令驱动三个双模式飞轮电机加减速,产生反作用力矩,与卫星本体进行动量交换,用于卫星姿态稳定控制。
76.优选的,每一双模式飞轮可同时具备响应转速模式和响应力矩模式的功能。本实施例中,双模式飞轮lx在通过其上的第一串口接收到控制姿态稳定的姿控转速指令rwx,以及通过其上的若干个第二串口接收m个干扰力矩t1,t2
…
tm对应的力矩模式码后,将姿控转速指令rwx与用于补偿m个干扰力矩的补偿转速rtx叠加,作为当前自身所需输出的实际转速rx。
77.其中,rx=rwx rtx=rwx rt1x rt2x
…
rtmx。
78.双模式飞轮ly在通过其上的第一串口接收到控制姿态稳定的姿控转速指令rwy,以及通过其上的若干个第二串口接收m个干扰力矩t1,t2
…
tm对应的力矩模式码后,将姿控转速指令rwy与用于补偿m个干扰力矩的补偿转速rty叠加,作为当前自身所需输出的实际转速ry。
79.其中,ry=rwy rty=rwy rt1y rt2y
…
rtmy。
80.双模式飞轮lz在通过其上的第一串口接收到控制姿态稳定的姿控转速指令rwz,以及通过其上的若干个第二串口接收m个干扰力矩t1,t2
…
tm对应的力矩模式码后,将姿控转速指令rwz与用于补偿m个干扰力矩的补偿转速rtz叠加,作为当前自身所需输出的实际转速rz。
81.其中,rz=rwz rtz=rwz rt1z rt2z
…
rtmz。
82.进一步的,双模式飞轮lx、ly和lz同时输出rx、ry和rz,产生角动量与反作用力矩作用于星体,达到同时实现卫星的稳态控制和干扰力矩补偿的目的。
83.在本发明的一个实施例中,星上计算机通过第一串口与第一串口所在的双模式飞轮进行通讯时,先发送识别码,再发送相应的数据,第一串口所在的双模式飞轮识别该识别码后,再响应相应的数据。
84.其中,识别码为第一识别码时,相应的数据为姿控转速指令;识别码为第二识别码时,相应的数据为立即转速指令,其中,双模式飞轮接收到立即转速指令后,以立即转速指令对应的转速值进行双模式飞轮转速控制;识别码为第三识别码时,相应的数据为双模式飞轮返回信息请求指令;识别码为第四识别码时,相应的数据为补偿力矩信息上注修改请求指令。
85.具体的,双模式飞轮与星上计算机通讯的第一串口的数据传输方式约定以双模式飞轮为被动方的主从通讯方式。双模式飞轮与星上计算机通讯时,星上计算机先发送识别
码及相应的数据给双模式飞轮,双模式飞轮再根据接收的识别码响应处理相应的数据。
86.其中,所述的识别码为11h时,相应的数据表示姿控转速指令,即上述的rwx,rwy,rwz。所述的识别码为22h时,相应的数据表示立即转速指令,即接收到立即转速指令,双模式飞轮中断当前所有的指令任务,以立即执行转速指令的值为目标值控制双模式飞轮转速,该指令必要时由地面上注。所述的识别码为44h时,相应的数据表示请求双模式飞轮返回信息,返回的信息包括当前电机转速、电机电流以及上注指令执行情况等信息,用于对双模式飞轮状态的监控。所述的识别码为aah时,相应的数据表示上注修改力矩模式码低4位为1111b的模式补偿力矩信息。
87.为了使本领域技术人员能够清晰地了解本实施例的卫星稳定控制及干扰补偿方法,下面将结合具体示例对本实施例的卫星稳定控制及干扰补偿方法进行详细阐述。
88.以某三轴姿态稳定控制卫星为例,其载荷是两个绕固定轴往复摆动的转动机构,载荷在摆动过程产生干扰力矩,该干扰力矩不进行补偿会对卫星的姿态稳定控制造成影响。该卫星的控制系统,在对卫星三轴姿态稳定控制的同时需要对转动机构摆动时产生的干扰力矩进行补偿。
89.三轴姿态稳定控制卫星三轴正交坐标系为滚动轴(记为x轴)、俯仰轴(记为y轴)和偏航轴(记为z轴)。其中,任意指向的干扰力矩与星体的坐标关系如图2所示,与x轴、y轴和z轴的夹角分别为α、β和γ。
90.本实施例卫星,如图3所示,安装两个转动机构即载荷q1与q2。载荷q1绕ζ轴往复摆动;载荷q2可绕ζ轴往复摆动,或绕y轴往复摆动。ζ轴位于卫星三轴正交坐标系的xoz平面内,与x轴、y轴和z轴的夹角分别为α、β和γ,其中β为90
°
。
91.本实施例中,载荷q1在绕ζ轴摆动时,产生相应的实际干扰力矩记为t1;载荷q2在绕ζ轴摆动时,产生相应的实际干扰力矩记为t2,在绕y轴摆动时,产生相应的实际干扰力矩记为t3。根据载荷摆动的运动特性,t1,t2和t3可用正弦曲线近似拟合,该干扰力矩的信息(包括幅值大小,方向和周期等)由转动机构的物理机械特性和转动特性标定得知,标定的精度保证,标定值可视为与真实值相等。
92.其中,干扰力矩t1与干扰力矩t2均沿ζ轴方向。干扰力矩t1在x轴、y轴和z轴上的投影分量分别为t1x、t1y和t1z,干扰力矩t2在x轴、y轴和z轴上的投影分量分别为t2x、t2y和t2z,与投影系数kx,ky,kz存在如下关系:t1x=kxt1;t1y=kyt1;t1z=kzt1;t2x=kxt2;t2y=kyt2;t2z=kzt2。所述的投影系数kx,ky,kz与所述的空间角α,β和γ关系如下:kx=cosα;ky=cosβ=cos90
°
=0,即该干扰力矩在y轴上的投影分量为0;kz=cosγ。干扰力矩t3沿y轴方向,x轴,z轴上的投影分量均为零:t3x=t3z=0;t3y=t3。
93.如图4所示,在该卫星的滚动轴(x轴)安装一个双模式飞轮lx、俯仰轴(y轴)安装一个双模式飞轮ly、偏航轴(z轴)安装一个双模式飞轮lz,斜装方向(s轴)安装一个双模式飞轮ls。
94.其中,所述的s轴的指向与x轴、y轴和z轴在空间上的夹角相等,s轴上的双模式飞轮ls作为冗余冷备份,在卫星正常工作时不开机,本实例应用中不对该双模式飞轮的使用进行阐述。
95.上述卫星,在正常飞行过程中,星上计算机,将卫星三轴姿态稳定控制所需的三个姿控转速指令rwx,rwy,rwz,分别发送至所述正交轴上的三个双模式飞轮lx、ly和lz上,驱
动三个双模式飞轮电机加减速,产生反作用力矩,与卫星本体进行动量交换,用于卫星姿态稳定控制。
96.所述的卫星载荷q1,在转动产生干扰力矩t1的同时,将其对应的力矩模式码,发送到lx和lz两个双模式飞轮(由于y轴上未产生干扰力矩分量,双模式飞轮ly未发送),双模式飞轮根据收到的力矩模式码,查询存储器中的力矩模式表,找到与t1相对应的补偿力矩t1',t1'与t1的大小相等,方向相反,双模式飞轮lx与投影系数即加权系数kx加权后,得出应输出的力矩补偿分量,t1x'=kxt1',双模式飞轮lz与投影系数即加权系数kz加权后,得出应输出的力矩补偿分量,t1z'=kzt1',双模式飞轮lx和lz对力矩补偿分量t1x'和t1z'进行积分,得出并输出相应的转速rt1x和rt1z,用于干扰力矩t1的快速补偿。
97.所述的卫星载荷q2,在转动产生干扰力矩t2的同时,将其对应的力矩模式码,发送到lx和lz两个双模式飞轮,双模式飞轮根据收到的力矩模式码,查询存储器中的力矩模式表,找到与t2相对应的补偿力矩t2',t2'与t2的大小相等,方向相反,双模式飞轮lx与投影系数即加权系数kx加权后,得出应输出的力矩补偿分量,t2x'=kxt2',双模式飞轮lz与投影系数即加权系数kz加权后,得出应输出的力矩补偿分量,t2z'=kzt2',双模式飞轮lx和lz对力矩补偿分量t2x'和t2z'进行积分,得出并输出相应的转速rt2x和rt2z,用于干扰力矩t2的快速补偿。
98.所述的卫星载荷q2,在转动产生干扰力矩t3的同时,将其对应的力矩模式码,发送到双模式飞轮ly(由于x轴和z轴上未产生干扰力矩分量,双模式飞轮lx和lz未发送),双模式飞轮根据收到的力矩模式码,查询存储器中的力矩模式表,找到与t3相对应的补偿力矩t3',t3'与t3的大小相等,方向相反,双模式飞轮ly得出应输出的力矩补偿分量,t3y'=t3',双模式飞轮ly对力矩补偿分量t3y'进行积分,得出并输出相应的转速rt3y,用于干扰力矩t3的快速补偿。
99.如图5所示,双模式飞轮lx,在接收到星上计算机的姿控转速指令rwx,载荷q1干扰力矩t1对应的力矩模式码和载荷q2干扰力矩t2对应的力矩模式码之后,将姿控转速指令下的转速rwx与力矩补偿转速rt1x,rt2x三个转速叠加,作为当前输出的实际转速rx。其中,rx=rwx rt1x rt2x。
100.如图6所示,双模式飞轮ly,在接收到星上计算机的姿控转速指令rwy,载荷q2干扰力矩t3对应的力矩模式码之后,将姿控转速指令下的转速rwy与力矩补偿转速rt3y两个转速叠加,作为当前输出的实际转速ry。其中,ry=rwy rt3y。
101.如图7所示,双模式飞轮lz,在接收到星上计算机的姿控转速指令rwz,载荷q1干扰力矩t1对应的力矩模式码和载荷q2干扰力矩t2对应的力矩模式码之后,将姿控转速指令下的转速rwz与力矩补偿转速rt1z,rt2z三个转速叠加,作为当前输出的实际转速rz。其中,rz=rwz rt1z rt2z。
102.如图8所示,每一双模式飞轮通过图8的链路结构可得到当前输出的实际转速,如rx、ry和rz。进一步的,双模式飞轮lx、ly和lz同时输出rx、ry和rz之后,会产生角动量与反作用力矩作用于星体,达到同时实现卫星的稳态控制和干扰力矩补偿的目的。
103.如图9所示,本应用实例的双模式飞轮,设计2路与载荷通讯的串口1和串口2,即第一串口,其具备接收数据功能,然后设计1路与星上计算机通讯的串口3,即第二串口,具备接收与发送双向数据传输功能。
104.所述的通讯串口1和2,用于与两个不同的载荷q1和q2连接,数据传输约定双模式轮直接接收载荷的指令信息,指令信息由识别码5ah和相应的力矩模式码组成。双模式飞轮根据力矩模式码,查找对应的输出力矩,分别与投影系数即加权系数kx,ky,kz加权后,进行积分,得出相应的力矩补偿转速rtnx、rtny和rtnz。
105.所述的载荷q1和q2,摆动的幅值大小、方向和周期等不同,产生不同的干扰力矩t1,t2,t3,需要不同的补偿力矩t1',t2',t3',所述的力矩模式码与补偿力矩一一对应,用于对双模式飞轮存储的力矩模式表进行查询。
106.如图10所述的力矩模式码,长度设计为一字节。高2位表示补偿力矩的极性,00b表示正极性,11b表示负极性,次高2位表示信号来源,01b表示力矩指令来源于所述摆动载荷q1,10b表示力矩指令来源于所述摆动载荷q2,低4位结合次高2位,确定补偿力矩指令信息的内容,包含力矩的幅值,周期,作用时间等信息,由载荷的摆动信息决定。0001b表示第一种补偿力矩模式,0010b表示第二补偿力矩模式,以此类推。其中低4位为1111b的模式为预留模式,该模式的补偿力矩信息,由地面通过星上计算机通信串口上注。
107.综上所述,本实施例的卫星稳定控制及干扰补偿方法,通过双模式飞轮,可响应姿态稳定控制的转速指令,同时对需要进行补偿的干扰力矩进行前馈补偿,减少或抵消干扰力矩,实现卫星的高精度对地稳态控制,并且无需单独配置飞轮补偿干扰力矩,可简化需要力矩补偿的卫星的系统单机配置,降低卫星成本,减轻卫星质量,降低发射成本。本发明中的双模式飞轮还可同时使用双模式,进行姿态稳定控制和干扰力矩补偿;或者只使用其中的一种模式,仅作为姿态稳定控制或干扰力矩补偿,增加了卫星系统单机配置的灵活性,并且,本发明中的双模式飞轮存储的力矩模式表内容相同,通过力矩模式码进行区分,可遍历所有转动机构产生的所有干扰力矩,由此不同双模式飞轮可相互轮换,能够降低系统设计的复杂性,以及可通过分别对不同的干扰力矩进行标定,提高干扰力矩的补偿效果。
108.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
109.尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。