1.本实用新型属于矿山智能安全监测技术领域,具体涉及一种巷道瓦斯云端智能监测设备。
背景技术:
2.我国“贫油、少气、相对富煤”,在我国的基础能源中煤炭仍然占有很大比重。随着矿井开采深度增加,目前的生产矿井中,有50%以上为煤与瓦斯突出和高瓦斯矿井,其在生产过程中易发生煤与瓦斯突出、瓦斯爆炸和瓦斯浓度超限等高复杂、大破坏、低预见的安全事故,是煤矿生产中亟待解决的重大安全问题。工作面及巷道中的瓦斯造成的主要危害是瓦斯爆炸,瓦斯爆炸所产生的高压和高温气流会沿着已有巷道快速蔓延,进而会产生威力巨大的爆炸冲击波严重摧毁巷道的内部设施,紧接着在巷道内积聚已久的煤尘被扬起然后发生连环爆炸。井下作业人员会受到爆炸后产生的有毒有害气体和爆炸冲击波的伤害发生窒息和伤亡。在较大的地应力、瓦斯压力作用于煤与瓦斯突出矿井时,瓦斯与破碎煤体结合后会出现突出现象,突出的煤流会使通风系统破坏,同时,大量的煤尘和瓦斯会被带入周围巷道,从而造成井下作业人员窒息和死亡。矿井瓦斯事故是我国煤矿安全生产的主要灾害事故之一,瓦斯事故频繁发生,不仅给煤炭企业造成巨大的经济损失,而且严重威胁煤矿工人的生命安全,瓦斯治理(特别是煤与瓦斯突出灾害治理)已成为煤矿保障矿井安全、提高生产效率的重点和难点。
3.矿井瓦斯浓度监测对瓦斯灾害防治尤其重要,传统监测主要依靠人工布置大量测点,对每个测点进行多次测量,现场施工工序繁琐,监测工作量增大,数据处理时间长精确度较低,并且现有的监测设备成本较高、抗干扰能力差、操作繁琐、技术要求高、测量数据少等局限性,基于上述情况,迫切需要一种更好的巷道瓦斯云端智能监测设备,以达到精确快速智能高效的监测巷道瓦斯浓度目的。
技术实现要素:
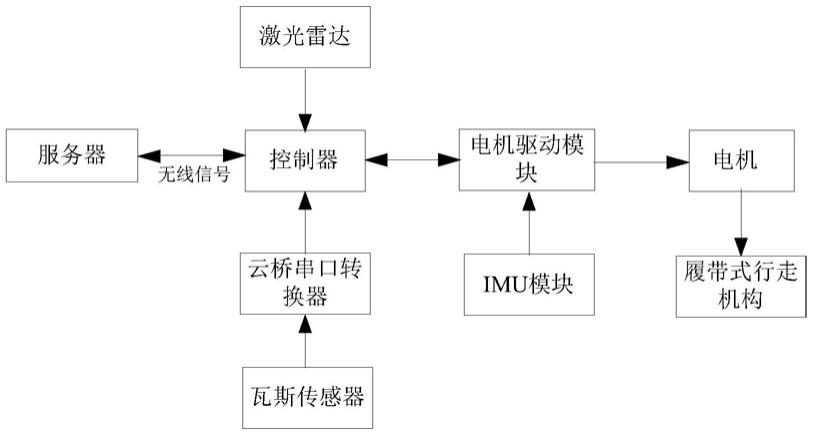
4.基于上述问题,本实用新型提出一种巷道瓦斯智能监测设备,包括:瓦斯传感器、云桥串口转换器、服务器、控制器、激光雷达、imu模块、通讯模块、电机驱动模块、电机、履带式行走机构;服务器通过通讯模块与控制器无线连接,瓦斯传感器与云桥串口转换器电连接,云桥串口转换器与控制器电连接,激光雷达、电机驱动模块分别与控制器电连接,imu模块、电机分别与电机驱动模块电连接,通过电机驱动履带式行走机构动作。
5.所述瓦斯传感器用于采集巷道内的瓦斯浓度,并传输至控制器;
6.所述激光雷达用于采集设备在行走过程中周围环境的点云数据,并传输至控制器;
7.所述imu模块用于采集设备在行走过程中的加速度、角速度信号,并传输至电机驱动模块;
8.所述电机驱动模块用于控制电机驱动履带式行走机构动作,还用于将接收到的加
速度、角速度信号传输至控制器;
9.所述控制器用于将接收到的信号传输至服务器;
10.所述通讯模块用于发送wifi信号或以太网信号;
11.所述服务器用于根据训练后的lstm模型预测瓦斯浓度值,根据生成的巷道地图规划行走路线。
12.所述履带式行走机构包括皮带、齿轮、金属底盘;设备上安装有防爆外壳,位于机构一侧的金属底盘固定在防爆外壳底部,通过电机带动主动齿轮旋转,主动齿轮带动四个从动齿轮旋转,齿轮、皮带通过啮合方式传动;
13.瓦斯传感器、云桥串口转换器分别安装在由防爆外壳组成的腔体内部的中间隔板上,激光雷达安装在防爆外壳的顶部,imu模块、通讯模块、电机驱动模块分别安装在防爆外壳底部。
14.进一步地,为了采集设备行进过程中的视频信息,在防爆外壳的顶部还安装有摄像头,摄像头与服务器无线连接,服务器上安装有rviz软件,通过rviz软件控制摄像头的开关,当控制摄像头打开时,摄像头实时采集巷道内的视频信息,并上传到服务器进行可视化显示。
15.一种采用所述的巷道瓦斯智能监测设备的瓦斯浓度监控方法,包括:
16.步骤1:通过服务器中安装的rviz软件控制所述监控设备在待监测巷道中行走,通过激光雷达实时采集巷道周围环境的点云数据,通过瓦斯传感器实时采集巷道内的瓦斯浓度数据,通过imu模块实时采集行进过程中的角速度、加速度信息;
17.步骤2:根据采集到的点云数据利用slam算法生成巷道的地图;
18.步骤3:构建lstm模型并利用采集到的瓦斯浓度数据进行训练;
19.步骤4:设置行走的起点、终点后,根据生成的巷道地图采集巷道内的瓦斯浓度值,利用训练后的lstm模型输出预测的瓦斯浓度。
20.所述步骤3包括:
21.步骤3.1:将采集到的瓦斯浓度数据进行滤波处理,将滤波处理后的瓦斯浓度数据作为样本数据集;
22.步骤3.2:构建lstm模型,利用样本数据集对lstm模型进行训练,得到训练后的lstm模型;
23.步骤3.3:利用训练后的lstm模型输出不同预测周期内的瓦斯浓度值。
24.本实用新型的有益效果是:
25.本实用新型提出了一种巷道瓦斯智能监测设备,通过构建瓦斯浓度的预存模型实现了瓦斯浓度的长短周期预测,通过生成巷道地图可以实现设备自动规划路径,实现井下无gps设备自主导航及建图功能,井下瓦斯智能采集、云端智能存储及智能分析预测;为深部煤矿安全、绿色、高效开采提供保障。
附图说明
26.图1为本实用新型中巷道瓦斯智能监测设备的系统框图;
27.图2为本实用新型中采用巷道瓦斯智能监测设备的瓦斯浓度监控方法流程图;
28.图3为本实用新型中巷道瓦斯云端智能监测设备的结构左视图;
29.图4为本实用新型中巷道瓦斯云端智能监测设备的结构前视图;
30.图5为本实用新型中巷道瓦斯云端智能监测设备的结构俯视图;
31.图6为本实用新型中巷道瓦斯智能监测设备的控制原理图;其中,(a)为构建巷道地图的原理图,(b)为瓦斯浓度的采集原理图;
32.图7为本实用新型中lstm(long short-term memory)模型的构建原理图;
33.图8为本实用新型中巷道瓦斯智能监测设备的电气接线图;
34.图中,1、设备底面板;2、设备前侧面板;3、设备后侧面板;4、设备顶面板;5、防爆外壳;6、设备中间隔板;7、螺栓i;8、螺栓ii;9、驱动面板;10、金属底盘;11、电机;12、惯性测量单元(imu模块);13、金属齿轮;14、五边形履带;15、数据传输线;16、供电线;17、电池;18、激光雷达;19、双目摄像头;20、螺栓iii;21、树莓派4b控制面板;22、瓦斯传感器;23、云桥串口转换器;24、地面遥控站;25、通讯模块(wifi/以太网)。
具体实施方式
35.下面结合附图和具体实施实例对实用新型做进一步说明。
36.如图1所示,一种巷道瓦斯智能监测设备,包括:瓦斯传感器、云桥串口转换器、服务器、控制器、激光雷达、imu模块、通讯模块、电机驱动模块、电机、履带式行走机构;服务器通过通讯模块与控制器无线连接,瓦斯传感器与云桥串口转换器电连接,云桥串口转换器与控制器电连接,激光雷达、电机驱动模块分别与控制器电连接,imu模块、电机分别与电机驱动模块电连接,通过电机驱动履带式行走机构动作。
37.所述瓦斯传感器用于采集巷道内的瓦斯浓度,并传输至控制器;
38.所述激光雷达用于采集设备在行走过程中周围环境的点云数据,并传输至控制器;
39.所述imu模块用于采集设备在行走过程中的加速度、角速度信号,并传输至电机驱动模块;
40.所述电机驱动模块用于控制电机驱动履带式行走机构动作,还用于将接收到的加速度、角速度信号传输至控制器;
41.所述控制器用于将接收到的信号传输至服务器;
42.所述通讯模块用于发送wifi信号或以太网信号;
43.所述服务器用于根据训练后的lstm模型预测瓦斯浓度值,根据生成的巷道地图规划行走路线。
44.所述履带式行走机构包括皮带、齿轮、金属底盘;设备上安装有防爆外壳,位于机构一侧的金属底盘固定在防爆外壳底部,通过电机带动主动齿轮旋转,主动齿轮带动四个从动齿轮旋转,齿轮、皮带通过啮合方式传动;
45.瓦斯传感器、云桥串口转换器分别安装在由防爆外壳组成的腔体内部的中间隔板上,激光雷达安装在防爆外壳的顶部,imu模块、通讯模块、电机驱动模块分别安装在防爆外壳底部。
46.为了采集设备行进过程中的视频信息,在防爆外壳的顶部还安装有摄像头,摄像头与服务器无线连接,服务器上安装有rviz软件,通过rviz软件控制摄像头的开关,当控制摄像头打开时,摄像头实时采集巷道内的视频信息,并上传到服务器进行可视化显示。
47.本实施例中,服务器为计算机,在服务器上安装有rviz软件,根据激光雷达采集的点云数据利用rviz软件生成巷道的地图,控制器为树莓派(型号为h-20-header 20x2),利用rviz软件构建用于实现路径规划的地面遥控站,通过地面遥控站设置行走的起点、终点,显示设备的运行轨迹,在服务器上还编写有监控实时数据采集值的监控界面;电机型号为tssop-14_74hc00pw;电机驱动模块(型号为stm32);瓦斯传感器(型号为jxbs-4001);通讯模块(型号为sim900a);imu模块(型号为imu pa-imu-03d);云桥串口转换器型号为jxyh-7001系列的以太网贯桥云盒,可以实现以太网与rs485接口之间的双向无缝转换,通过以太网贯桥云盒可以将rs485设备与电脑或者服务器通过以太网有机的结合。具体电气接线图如图8所示。
48.如图6(a)所示,地面遥控站通过wifi/局域网与树莓派4b控制面板进行连接从而向其发送指令进行控制,树莓派4b控制面板通过指令控制激光雷达及stm32电机驱动控制模块,imu模块采集加速度、角速度信息传输到stm32驱动控制模块中,stm32电机驱动控制模块控制舵机和电机动作,激光雷达采集巷道环境数据将其传输到树莓派4b控制面板,树莓派4b控制面板将其信息反馈到地面遥控站,通过地面遥控站中的rviz软件输入命令实现巷道地图构建可视化。
49.如图6(b)所示,瓦斯传感器采集巷道内瓦斯浓度,利用云桥串口转换器将rs485通讯信号转化成网络通讯信号,将数据自动存储在云端服务器中。
50.如图3~5所示,设备底面板1、设备前侧面板2、设备后侧面板3、设备顶面板4、防爆外壳5、设备中间隔板6、螺栓i7、螺栓ii8构成监测设备的设备外壳,驱动面板9固定在金属底盘10,它们之间通过焊接连接,电机11通过螺栓ii8固定在金属底盘10外侧,为设备提供动力,金属齿轮13通过螺栓ii8固定在金属底盘10外侧,防滑五边形履带14与金属齿轮13配合,两者构成齿轮-皮带连接,实现巷道复杂地面正常行走,九轴陀螺仪12固定在驱动控制面板9,它们之间通过焊接,驱动控制面板9通过数据传输线15连接到电机11,电池17通过供电线16连接到驱动控制面板9,为驱动控制面板提供电力需求。激光雷达18通过螺栓iii20固定在设备顶面板4,双目摄像头19通过螺栓iii20固定在设备顶面板4,激光雷达18通过数据传输线15与树莓派4b控制面板21连接,采集巷道的点云数据构建地图,双目摄像头19通过数据传输线15与树莓派4b控制面板21连接,获取巷道的图像信息。激光雷达通过获取光脉冲打在物体上并反射回到接收器的传播时间,再根据光速已知的原理,将传播时间转换成激光雷达lidar据测量物的距离,将数据形成点云数据。通过滤波器将运动畸变严重及距离超出阈值区域的点云数据去除。对点云数据进行单元划分,对一个单元内的数据进行直方化后求最小二乘最优解得到数据所在的插值位置,各单元间进行图优化处理,将各个单元当做节点,与其他节点进行相对位置的估算,再分段进行高精度激光雷达slam建图,在建立好的地图上标记该地图的起点和终点,确保地图的建立符合现实,不扭曲不割裂。
51.瓦斯传感器22通过螺栓iii20固定在设备中间隔板6,云桥串口转换器23通过螺栓iii20固定在设备中间隔板6,云桥串口转换器23通过数据传输线15与瓦斯传感器22连接,将传感器的rs485信号转换为网络信号。云桥串口转换器23通过数据传输线15与树莓派4b控制面板21连接,将网络信号传输到在计算机上构建的地面遥控站24的云端数据库,通过智能算法进行瓦斯大数据智能分析展示。通讯模块25安装在树莓派4b控制面板中,两者之间通过焊接连接,数据传输线15连接传感器与控制面板,进一步传输信号保证设备正常采
集数据。
52.如图2所示,一种采用所述的巷道瓦斯智能监测设备的瓦斯浓度监控方法,包括:
53.步骤1:通过服务器中安装的rviz软件控制所述监控设备在待监测巷道中行走,通过激光雷达实时采集巷道周围环境的点云数据,通过瓦斯传感器实时采集巷道内的瓦斯浓度数据,通过imu模块实时采集行进过程中的角速度、加速度信息;
54.步骤2:根据采集到的点云数据利用slam算法生成巷道的地图;simultaneous localization and mapping简称slam,即时定位与地图构建;
55.步骤3:构建lstm模型并利用采集到的瓦斯浓度数据进行训练,如图7所示;包括:
56.步骤3.1:将采集到的瓦斯浓度数据进行滤波处理,将滤波处理后的瓦斯浓度数据作为样本数据集;
57.步骤3.2:构建lstm模型,利用样本数据集对lstm模型进行训练,得到训练后的lstm模型;
58.步骤3.3:利用训练后的lstm模型输出不同预测周期内的瓦斯浓度值;
59.步骤4:设置行走的起点、终点后,根据生成的巷道地图采集巷道内的瓦斯浓度值,利用训练后的lstm模型输出预测的瓦斯浓度。
60.所述监测设备的使用过程如下:
61.s10:检查设备安装以及设备能否正常运行;
62.s20:将设备中电机驱动模块、瓦斯传感器通过通讯模块(wifi/以太网)与树莓派4b控制模块进行连接;
63.s30:地面遥控站通过通讯模块(wifi/以太网)与树莓派4b控制模块进行连接,实现设备正常工作;
64.s40:将驱动模块、瓦斯数据处理模块(瓦斯传感器)打开进行数据采集与传输;
65.s50:固定在设备外壳顶部的激光雷达传感器,发射光脉冲打在物体上并反射回到接收器的传播时间,再根据光速己知的原理,将传播时间转换成lidar据测量物的距离,将数据形成点云数据,地面遥控站利用slam算法进行数据处理,构造井下巷道初始地图;
66.s60:设备通过巷道slam定位建图模块构建初始地图,操作人员通过地面遥控模块标记设备采集瓦斯路径,设备根据规划的路径进行自主瓦斯采集;
67.s70:安装在设备外壳腔体内部的瓦斯传感器与树莓派4b控制模块通过通讯模块进行连接,该传感器采用载体催化元件,井下瓦斯环境浓度可由瓦斯传感器智能直接采集监测以实现显示、报警功能,所采集数据通过云桥信号转换器将rs485信号转换为网络信号,将其储存在瓦斯云端数据库,通过瓦斯大数据平台对云端瓦斯数据进行智能算法分析展示、绘制图表,操作人员可通过地面遥控模块进行查看。
68.s80:设备采集完毕,监测测量数据是否有效,数据有效后,设备自主通过地面遥控模块自主返回,设备回到地面,关闭设备所有模块,对其进行检查。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。