1.本实用新型涉及机械设备技术领域,更具体地说,本实用新型涉及一种用于移印机自动上下料的机械手。
背景技术:
2.移印机是一种印刷设备,适用于塑胶、玩具、玻璃、金属、陶瓷、电子、ic封等。移印是一种间接的可凹胶头印刷技术,已成为各种物体表面印刷和装饰的一种主要方法,目前的移印机的取料为人工搬运,整体效率较低。
3.但是目前的机械手在进行搬运材料时,仍旧需要工作人员将材料先搬到其表面,然后进行下料,整体工作效率较低,且耗费的人力成本较高,因此,本领域技术人员提供了用于移印机自动上下料的机械手,以解决上述背景技术中提出的问题。
技术实现要素:
4.为了克服现有技术的上述缺陷,本实用新型的实施例提供一种用于移印机自动上下料的机械手,相互配合以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种用于移印机自动上下料的机械手,包括机械手承接架,加工调整机架,所述机械手承接架包括调位板,所述加工调整机架包括承接杆,所述承接杆的一端活动连接有联动杆,所述联动杆的底端活动连接有气囊板,所述承接杆的外侧活动连接有联动滑杆,所述联动滑杆的底端活动连接有承物板,所述承物板的底端活动连接有抓取架,所述抓取架的底端活动连接有磁吸板,通过承物板上的材料被下方的磁吸板吸附,实现单次材料的摆放,而联动滑杆带动联动杆挤压气囊板时,气囊板内部的气压将其弹回,使磁吸板重新抓取承物板上的材料,整体运作简单。
6.优选的,所述加工调整机架的一侧活动连接有调整架,所述调整架活动连接在机械手承接架的顶端,整体的结构较为简单。
7.优选的,所述调整架包括滑轨,所述滑轨的一端活动连接有滑动板,所述滑动板的外侧活动连接有承接杆,通过滑轨与滑动板的方位调整,使其实现了处理不同的角度的材料板。
8.优选的,所述磁吸板的数量为多组,所述多组磁吸板关于抓取架呈矩形阵列设置,提高材料的抓取稳固性。
9.优选的,所述磁吸板的底端活动连接有加工板,所述加工板的一端活动连接有转杆柱,磁吸板通过气囊板恢复原处时,转杆柱失去了磁吸板的吸附,则加工板正常旋转。
10.优选的,所述转杆柱的底端设置有步进电机,所述加工板与转杆柱的步进电机呈可转动状态设置,实现整体的加工运行。
11.优选的,所述滑轨的内侧设置有橡胶垫,所述滑动板与滑轨的橡胶垫呈可滑动状态设置,防止滑动板的移速过快,进而发生偏差。
12.本实用新型的技术效果和优点:
13.1、该用于移印机自动上下料的机械手,承接杆通过联动滑杆上下移动调整运输方位,而承物板上摆放原料,而承物板通过电力向下侧移动时,承物板触碰抓取架,承物板上的原料掉落于抓取架上,而抓取架抓取材料旋转,将其摆放在加工板上,而气囊板内部的气压将联动滑杆推回原处,则联动滑杆带动承物板继续向上侧收集下一块材料,从而实现了整体工作效率较高,且不需要耗费过多的人力成本;
14.2、该用于移印机自动上下料的机械手,承接杆带动磁吸板离开加工板的表面,转杆柱旋转,将下一个加工板转动至加工处,从而实现了提高多组材料加工同时进行,节省了加工成本。
附图说明
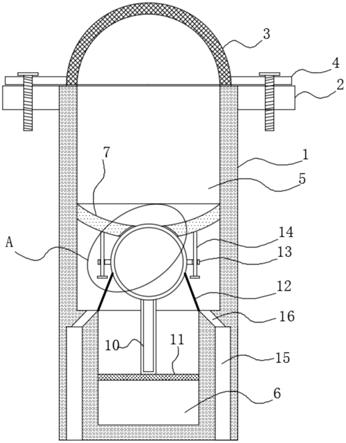
15.图1为本实用新型机械手承接架结构的立体示意图;
16.图2为本实用新型加工板机构的局部剖面图;
17.图3为本实用新型承接杆机构的局部剖面图。
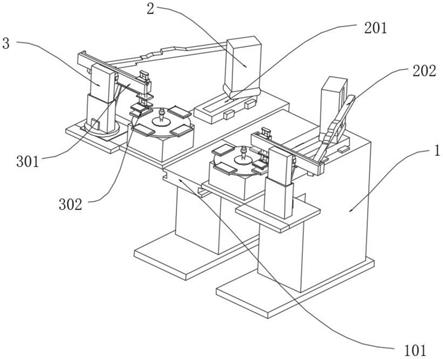
18.图中:1、机械手承接架;101、调位板;2、调整架;201、滑轨;202、滑动板;3、加工调整机架;301、承接杆;302、磁吸板;303、抓取架;304、承物板;305、转杆柱;306、加工板;307、联动杆;308、气囊板;309、联动滑杆。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.参照说明书附图1-3,本实用新型实施例一:一种用于移印机自动上下料的机械手,包括机械手承接架1,加工调整机架3,机械手承接架1包括调位板101,加工调整机架3包括承接杆301,承接杆301的一端活动连接有联动杆307,联动杆307的底端活动连接有气囊板308,承接杆301的外侧活动连接有联动滑杆309,联动滑杆309的底端活动连接有承物板304,承物板304的底端活动连接有抓取架303,抓取架303的底端活动连接有磁吸板302,接杆301通过联动滑杆309上下移动调整运输方位,而承物板304上摆放原料,而承物板304通过电力向下侧移动时,承物板304触碰抓取架303,同时联动滑杆309带动联动杆307挤压气囊板308,进而承物板304无法继续向下移动时,抓取架303的电磁吸附承物板304,承物板304通过转杆偏转60度,通过承物板304上的材料被下方的磁吸板302吸附,实现单次材料的摆放,而联动滑杆309带动联动杆307挤压气囊板308时,步进电机型号为dm860dma860h,气囊板308内部的气压将其弹回,使磁吸板302重新抓取承物板304上的材料,整体运作简单,磁吸板302的底端活动连接有加工板306,加工板306的一端活动连接有转杆柱305,磁吸板302通过气囊板308恢复原处时,转杆柱305失去了磁吸板302的吸附,则加工板306正常旋转,承物板304上的原料掉落于抓取架303上,而抓取架303抓取材料旋转,将其摆放在加工板306上,而气囊板308内部的气压将联动滑杆309推回原处,则联动滑杆309带动承物板304继续向上侧收集下一块材料,从而实现了整体工作效率较高,且不需要耗费过多的人力成本。
21.参照说明书附图2-3,本实用新型实施例二:调整架2包括滑轨201,滑轨201的一端活动连接有滑动板202,滑动板202的外侧活动连接有承接杆301,通过滑轨201与滑动板202的方位调整,使其实现了处理不同的角度的材料板,加工调整机架3的一侧活动连接有调整架2,调整架2活动连接在机械手承接架1的顶端,整体的结构较为简单,转杆柱305的底端设置有步进电机,加工板306与转杆柱305的步进电机呈可转动状态设置,实现整体的加工运行,滑轨201的内侧设置有橡胶垫,滑动板202与滑轨201的橡胶垫呈可滑动状态设置,防止滑动板202的移速过快,进而发生偏差,承接杆301带动滑动板202向外侧移动,而滑动板202在滑轨201滑动,则承接杆301带动磁吸板302离开加工板306的表面,转杆柱305旋转,将下一个加工板306转动至加工处,从而实现了提高多组材料加工同时进行,节省了加工成本。
22.工作原理:承接杆301通过联动滑杆309上下移动调整运输方位,而承物板304上摆放原料,而承物板304通过电力向下侧移动时,承物板304触碰抓取架303,同时联动滑杆309带动联动杆307挤压气囊板308,进而承物板304无法继续向下移动时,抓取架303的电磁吸附承物板304,承物板304通过转杆偏转60度,则承物板304上的原料掉落于抓取架303上,而抓取架303抓取材料旋转,将其摆放在加工板306上,而气囊板308内部的气压将联动滑杆309推回原处,则联动滑杆309带动承物板304继续向上侧收集下一块材料,从而实现了整体工作效率较高,且不需要耗费过多的人力成本。
23.同时承接杆301带动滑动板202向外侧移动,而滑动板202在滑轨201滑动,则承接杆301带动磁吸板302离开加工板306的表面,转杆柱305旋转,将下一个加工板306转动至加工处,从而实现了提高多组材料加工同时进行,节省了加工成本。
24.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
25.其次:本实用新型公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本实用新型同一实施例及不同实施例可以相互组合;
26.最后:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。