取放机器清洁系统和方法
1.优先权主张
2.本pct申请主张2019年7月2日提交的美国专利申请系列号16/460,877、2019年7月2日提交的16/460,918、2019年7月2日提交的16/460,929和2020年2月18日提交的16/794,068、全部题为“取放机器清洁系统和方法(pick and place machine cleaning system and method)”的优先权。
技术领域
3.本公开内容特别适用于对自动或手动半导体装置及管芯(die)操纵(操作,handling)机器的取放设备和拾取工具的孔、喷嘴及接触表面进行定期且一致的清洁的装置、机构及方法,且本公开内容将在此情境中进行描述。清洁材料可包括清洁垫层,该清洁垫层具有一个或多个中间层,该一个或多个中间层具有预定的特性、规则的几何特征和/或不规则的表面形态。
背景技术:
4.取放设备用于这样的机器人(自动,robotic)机器内:该机器人机器用于将半导体装置、管芯或电子部件从一个支承托盘转移至另一个,将半导体装置或管芯从一个支承托盘或晶片条带转移至引线框架以便进行管芯附接,从一个支承托盘转移至测试插座以便进行电气测试且转移回至支承托盘,或用于电子部件从支承托盘安装至印刷电路板上。这些设备用于对范围广泛的半导体装置及管芯进行高速度、高精度的拾取及放置。该装备(设备)用于非时间表维护的停机时间对于生产率及通过量损失将具有显著影响。
5.取放设备包括多个吸盘、吸入口、真空夹头、喷嘴及真空拾取工具,用于经由真空力从装置支承托盘拾取半导体装置。真空力的吸取是由真空机构产生的,该真空机构上下移动以便从一个支承托盘拾取电子装置且将该装置放置于测试插座、引线框架或另一其他支承托盘中或放置于在预定义位置中的印刷电路板上。由于真空故障引起的误操纵可对装置造成损坏且可需要排除故障来恢复性能。此外,与真空相关的问题及拾取夹头的过度的向下按压力为管芯破损的主要因素。
6.为了保持正确的吸取且可靠地取放半导体装置,需要在取放设备与被操纵的半导体装置之间的接触式密封。真空孔、装置真孔喷嘴、真空入口/出口内的碎屑或吸取装置的接触表面上的碎屑将影响真空强度。随着时间的流逝,取放设备、拾取工具及吸取装置及尖端的孔可变得被堵塞或被各种材料污染,这些材料降低真空强度且可造成真空故障。为了清洁并维护取放设备,必须使ic装置操纵机器脱机,且手动地清洁各种取放设备。在脱机清洁操作期间,可能难以清洁或移除已经累积在拾取工具的喷嘴内或可已经被压实在喷嘴内或表面上的材料。例行的预防性清洁及碎屑移除对于控制累积及预防顽固污染物的积聚可为有效的。定期的预防性清洁及碎屑移除将延长维护前的平均时间且提高装备工作时间(uptime)。
7.通过从要清洁和/或翻新的装备移除真空拾取工具或吸式拾取工具来执行取放设
备的清洁。取放设备的清洁及翻新由使用溶剂或其他清洁溶液的湿式擦拭及擦洗过程组成。另外,可使用机械操作来手动地清洁拾取工具的真空端口以移除累积的碎屑。然而,拾取工具的手动操纵及清洁造成损坏的风险。
8.用于取放设备及真空拾取的该典型清洁过程需要在清洁和翻新取放组装体的同时停止半导体装置操纵功能。此外,湿式化学过程及机械擦洗过程可损坏真空拾取工具。为了使性能最大化且保持工作时间以实现高通过量,期望能够在不移除取放设备、真空拾取工具或吸式拾取工具的情况下且在不使用湿式化学过程或机械擦洗过程的情况下清洁半导体装置操纵机器的取放组装体。
附图说明
9.一些实施方式作为实例例示出且不受附图的图限制,其中相似的参考符号可指示类似的元件且其中:
10.图1a、图1b及图1c例示出在具有取放组装体的手动、半自动或自动半导体装置操纵机器中使用的工具,该取放组装体利用真空及吸式拾取工具来“拾取”在半导体装置的“拾取”侧的表面上具有各种污染物及碎屑的半导体装置;
11.图2a、图2b及图2c例示出在具有取放组装体的手动、半自动或自动半导体装置操纵机器中使用的工具,其中来自半导体装置的“拾取”侧的表面的各种污染物及碎屑已粘附或附接至用于“拾取”半导体装置的真空及吸式拾取工具;
12.图3a、图3b及图3c例示出在清洁操作期间在具有取放组装体的手动、半自动或自动半导体装置操纵机器中使用的工具,其中使各种拾取工具类型移动而与弹性清洁材料的表面接触;
13.图4a、图4b及图4c例示出用于从在具有取放组装体的手动、半自动或自动半导体装置中使用的各种真空及吸式拾取工具清洁并移除粘附的碎屑及污染物的方法;
14.图5例示出用于清洁在具有取放组装体的手动、半自动或自动半导体装置中使用的各种真空及吸式拾取工具的方法;
15.图6a为用于在手动、半自动或自动半导体装置操纵机器内使用的具有应用于载体的清洁垫的清洁装置的俯视图;
16.图6b为用于在手动、半自动或自动半导体装置操纵机器内使用的具有应用于基底表面的清洁垫的典型清洁装置的剖视图;
17.图6b为用于在手动、半自动或自动半导体装置操纵机器内使用的具有应用于ic封装或半导体装置的清洁垫的典型清洁装置的剖视图;
18.图7a为清洁介质的第二实施方式的剖视图,该清洁介质具有在清洁垫层下方的一个或多个中间顺应性(complaint)材料层;
19.图7b为清洁介质的第二实施方式的剖视图,该清洁介质具有在预定性质的清洁垫层下方的一个或多个中间刚性材料层;
20.图7c为清洁介质的第二实施方式的剖视图,该清洁介质具有在预定性质的清洁垫层下方的一个或多个中间刚性材料层及顺应性材料层;
21.图7d为清洁介质的第二实施方式的剖视图,该清洁介质具有在预定性质的清洁垫层下方的一个或多个交替的中间刚性材料层及顺应性材料层;
22.图8a为清洁材料的第三实施方式的剖视图,该清洁材料具有构造于预定性质的一个或多个材料层上的预定几何形状的均匀间隔的微柱;
23.图8b为清洁材料的第四实施方式的剖视图,该清洁材料具有由预定性质的一个或多个中间刚性材料层及顺应性材料层的组合构成的预定几何形状的均匀间隔的微柱;
24.图9a为图8b中所示的均匀间隔的微柱的放大剖视图,所述微柱由一个或多个中间材料层的组合构成,以获得进入取放组装体的真空及吸式拾取工具的接触区域中的一致清洁效果;
25.图9b为清洁材料的第五实施方式的放大剖视图,该清洁材料具有均匀间隔的微角锥,所述微角锥由一个或多个中间材料层的组合构成,以获得进入取放组装体的真空及吸式拾取工具的接触区域中的一致清洁效果;
26.图10a为清洁材料的第六实施方式的平面图,其展示出使用“横向路径(street)”阵列相互解耦的微特征的一部分,以用于产生第二面积矩或惯性矩来控制抗弯曲性;
27.图10b为清洁材料的第七实施方式的平面图,其展示出使用“竖向路径(avenue)”阵列相互解耦的微特征的一部分,以用于产生第二面积矩或惯性矩来控制抗弯曲性;
28.图10c为清洁材料的第八实施方式的平面图,其展示出使用对角线阵列相互解耦的微特征的一部分,以用于产生第二面积矩或惯性矩来控制抗弯曲性;
29.图11a、图11b及图11c为图6a中具有载体基底的清洁材料的剖视图,该清洁材料用于清洁取放组装体的真空及吸式拾取工具的侧面、内部及接触区域;
30.图12a、图12b及图12c为图8b及图9a中具有微柱的清洁材料的剖视图,该清洁材料用于清洁取放组装体的真空及吸式拾取工具的侧面、内部及接触区域;
31.图13a、图13b及图13c为图9b中具有微角锥的清洁材料的剖视图,该清洁材料用于清洁取放组装体的真空及吸式拾取工具的内部及接触区域;
32.图14a为使用清洁装置进行清洁之前的真空夹头的实例;以及
33.图14b为使用清洁装置进行清洁之后的真空夹头的实例。
具体实施方式
34.本公开内容特别适用于对自动或手动半导体装置操纵机器的取放设备和拾取工具的孔、喷嘴及接触表面进行定期且一致的清洁的装置、机构及方法,且本公开内容将在此情境中进行描述。然而,应了解,该装置、机构及方法具有更大的实用性,因为其可用于清洁具有随着时间的推移而变得被各种材料堵塞或弄脏的孔、喷嘴及接触表面的任何装置,其亦可用于清洁或翻新自动或手动半导体装置操纵机器的其他拾取工具,且该装置、机构及方法可使用仍然在本公开内容的范围内的下文公开的实施方式的变型来实施。例如,下文公开的清洁装置及方法可用于清洁smt(表面安装技术)部件放置机器的取放设备,该smt部件放置机器用于将范围广泛的电子部件(例如电容器、电阻器、集成电路)放置于pcb上。此外,用于以上清洁的清洁材料可为下文描述的实施方式,但是亦可为将在本公开内容的范围内的清洁装置的其他变型。
35.在一个实例用途中,可使用粘性的弹性清洁材料(通常为下文描述的各个实施方式中的清洁材料)周期性地清洁取放设备、真空拾取工具或吸式拾取工具,所述清洁材料安装于替代装置、各种基底上,工具中的指定位置中,或工具内的载体中,其可用于可预测地
清洁真空孔并保持真空孔的性能并且保持接触表面所需的清洁度以在拾取期间实现最大的真空力。可使用清洁材料来清洁工具/机器(拾取工具或取放设备或用于smt部件的取放设备或用于封装装置的取放设备)的接触正被操纵的部件/装置/ic等的接触部分,其中接触元件/部分可为例如一个或多个真空孔、一个或多个喷嘴、一个或多个吸盘、一个或多个吸入口、一个或多个真空夹头及连接至半导体装置操纵机器的真空拾取工具。除了以上取放设备之外,清洁装置及方法亦可用于管芯附接机器或倒装芯片接合机器的取放组装体。清洁材料、装置、机构及方法可用于翻新手动、半自动及自动半导体装置操纵机器内的取放设备,而无需非时间表的停机维护时间。在夹头接触表面上具有碎屑的清洁之前的真空夹头的实例在图14a中展示出且在下文进行描述,且在使用所公开的清洁装置进行清洁之后的相同真空夹头的实例在图14b中展示出且在下文进行描述。
36.图1a至图1c例示出具有不同类型的拾取工具(101、102及103)的已知的自动或手动半导体装置操纵机器(100),拾取工具用于“拾取”诸如电子装置或半导体装置的表面安装装置(107)。
37.图1a展示出该机器100的一部分,且特别展示出机器的锥形真空拾取工具(101)部分,其具有定位成靠近半导体装置(107)以拾取并放置半导体装置(107)的入口/出口,图1b展示出吸盘拾取工具(102),其具有柔性垫及定位成靠近半导体装置(107)以拾取并放置半导体装置(107)的入口/出口,且图1c展示出多侧面真空夹头拾取工具(103),其具有定位成靠近半导体装置(107)以拾取并放置半导体装置(107)的入口/出口。真空拾取工具(101、102及103)可移除地附接至半导体装置操纵机器,使得可周期性地移除拾取工具以进行清洁和/或翻新。使真空拾取工具(101、102及103)朝向半导体装置107降低,直至形成接触且可将真空应用于装置的表面为止。拾取工具的接触表面亦接触并利用真空吸附存在于半导体装置的表面上的任何碎屑、颗粒或污染物(104)(统称“碎屑”),为了说明的目的,用沿着半导体装置的表面的黑色虚线表示碎屑、颗粒或污染物,因为实际的碎屑、颗粒或污染物可为任何形状或大小且可由各种不同的材料制成。例如,被取放的装置上的碎屑可为金属薄片、复合模碎片、焊料残留物、残留的助焊剂、来自其他装置的颗粒、在操纵期间产生的灰尘等。
38.图2a至图2c例示出在将半导体装置取放于预定义位置之后的具有不同类型的拾取工具(101、102及103)的已知的自动或手动半导体装置操纵机器(100)。当工具101、102、103拾取半导体装置(107)时,来自半导体装置(107)的碎屑、颗粒或污染物(104)粘附至不同拾取工具(101、102及103)的接触表面及入口/出口,如图所示。例如,图2a展示出其中碎屑封闭真空入口/出口的锥形真空拾取工具(101),图2b展示出其中碎屑粘附至柔性垫且堵塞真空入口/出口的吸盘拾取工具(102),且图2c展示出其中碎屑在夹头内部及外部并且堵塞真空入口/出口的多侧面真空夹头拾取工具(103)。粘附的碎屑、颗粒或污染物(104)将降低可用于真空机构从一定位置可重复的、一致地且重复地拾取装置(107)且将装置放置在第二预定义位置而不会将装置掉落或误操纵的吸力的量。拾取工具101-103过度的向下按压力(由于粘附的碎屑、颗粒或污染物(104)导致的吸力降低所造成,其中拾取工具可能会更用力地向下按压以实现所要的吸力)为管芯破损的熟知且主要的因素。
39.图3及图4例示出用于清洁不同拾取工具(图3a及图4a中的101、图3b及图4b中的102以及图3c及图4c中的103)的接触表面及入口/出口的方法的第一实施方式。与典型的清
洁方法相对照,带有粘附的污染物(104)的不同拾取工具(101、102及103)在使用新颖的清洁方法的情况下不需要从真空机构移除。清洁材料(110)可安装于清洁基底上、替代封装上,或者安装于在预定义位置处的清洁块或台上。清洁过程可以不同的方式执行,所述方式可包括:手动地,由人将清洁材料(110)定位成邻近拾取工具(101、102及103)的接触表面及入口/出口;半自动地,其中人指示操纵机器将拾取工具(101、102及103)定位在清洁材料(110)附近;或者自动地,其中在需要清洁时或按周期性清洁周期,操纵机器将清洁材料或清洁替代物(104)移动且定位在拾取工具(101、102及103)下方。当手动地、半自动地或自动地开始清洁方法时,机器移动拾取工具,且将拾取工具插入至清洁材料中或使拾取工具与替代清洁装置接触。图4例示出清洁材料(110)如何捕获并移除碎屑、颗粒或污染物(104)。在一些实施方式中,可侦测机器的拾取错误且可开始清洁过程。清洁频率可为预防性维护,以便延长手动清洁执行之间的平均时间并且减少使机组脱机的需要。
40.图5例示出可在取放设备、真空拾取工具或吸式拾取工具上执行的清洁过程500。如上文所描述,可手动地、半自动地或自动地执行图5所示的过程。可按有规律的间隔在原位执行过程500以保持拾取工具接触表面清洁;定期收集碎屑、颗粒或污染物;且保持吸力等级以防止将装置掉落或误操纵,装置掉落或误操纵将导致停机时间或装备误差。如图5所示,该过程可包括当要执行清洁过程时将清洁材料定位成邻近于工具(502)。然后,清洁方法可致使工具插入至清洁材料上和插入至其中以移除碎屑(504)。在一个实施方式中,清洁材料可用于在机器的正常操作周期之间执行清洁。
41.用于清洁取放设备、真空拾取工具或吸式拾取工具的清洁材料可采用各种形式。例如,清洁材料可具有交联聚合物层,可具有在载体或基底或框架的顶部上的清洁层以使得清洁材料可以与半导体装置相同的方式进行操纵,可具有清洁层及在清洁层下方的一个或多个中间层等。清洁材料亦可具有纹理化、特征化或不规则的表面或图案,这将有利于清洁拾取工具的内部及外部。清洁材料可使得当拾取工具插入至清洁材料中时,清洁材料保留来自拾取工具及真空入口/出口的碎屑。清洁材料可优选地包括具有嵌入的磨料颗粒(诸如探针抛光剂(probe polish))或研磨(lapping)膜(诸如探针研磨剂(probe lap))的顺应性聚合物,所述磨料颗粒或研磨膜为国际测试解决方案公司制造的商业产品。
42.图6a、图6b及图6c例示出三种典型的不同类型的清洁装置,所述清洁装置为利用应用于各种基底材料、不同大小的基底、不同形状的基底的清洁材料制成或在一些应用中没有基底。如图6a及图6b所示,清洁装置20及21分别可包括基底23及清洁介质材料或垫24,清洁介质材料或垫24分别固定至、粘附至或应用于载体的表面或具有已知几何形状的基底。基底23可为塑料、金属、玻璃、硅、陶瓷或任何其他类似的材料。此外,图6c所示的基底25可具有近似于封装ic装置(dut)22的几何形状的几何形状。已知还没有人使用这些具有清洁材料的清洁装置来清洁拾取工具接触表面、侧面及真空入口/出口,或者在机器的正常操作期间这样做且在清洁操作期间不从机器移除拾取工具接触表面、侧面及真空入口/出口。
43.拾取工具接触表面、侧面及真空入口/出口清洁过程及装置可使用具有一个或多个中间顺应性层的清洁介质,如参考附图及实施方式更详细地描述。在一个实施方式(在图7a中展示出)中,清洁介质220可由具有预定性质(诸如硬度、弹性模量等)的清洁垫层202制成,所述性质有助于清洁与接合垫或框架接触的拾取工具接触表面、侧面及真空入口/出口。清洁介质220亦可具有附接至清洁垫层且在清洁垫层下方的一个或多个中间顺应性层
203。层的组合产生无法从个别组成材料获得的材料性质,而各种各样的基质、磨料颗粒及几何形状允许产品或结构具有最佳组合以使清洁性能最大化。通过在刚性清洁层下方添加顺应性或微孔泡沫底层,增强了清洁材料的整体特性,以便延长拾取工具接触表面、侧面及真空入口/出口的整体使用寿命,而不会损害形状或功能。将磨料颗粒层应用于顺应性未填充聚合物的表面或微孔泡沫的“皮肤”侧,得到具有优选磨料特性的多层材料。随着底层的整体顺应性得到系统地提高(或刚度减小),清洁材料的整体特性可为所限定的。
44.在图7a所示的一个实施方式中,清洁介质220亦可具有可移除式保护层201,可移除式保护层201在预期使用之前被安装在清洁垫202层的顶部上以便将表面清洁垫层与污染物隔离。可移除式保护层201保护清洁垫层202的工作表面不受碎屑/污染物的影响,直至清洁装置准备好用于清洁拾取工具接触表面、侧面及真空入口/出口为止。当清洁装置准备好用于清洁拾取工具接触表面、侧面及真空入口/出口时,可移除式保护层201可被移除以曝露清洁垫层202的工作表面。保护层可由已知的非反应性聚合物膜材料制成,且优选地由聚酯(pet)膜制成。保护层可具有无光毛面或其他“纹理化”特征以提高清洁效率。无光表面或特征化表面亦可能有助于识别清洁表面。该表面将是“功能性的”,且这些“功能特征”将促进各种喷嘴及夹头的清洁性能。可将这些功能特征插入至真空喷嘴的内部以便在真空通道内进行清洁及碎屑收集。
45.如图7a所示,除了一个或多个顺应性层203之外,清洁介质220亦可具有在一个或多个顺应性层203下方的胶粘剂层204及在胶粘剂层204的顶部上的可移除式离型层205。将清洁装置220安装在预定的基底材料上(用于对工具的清洁)为通过以下方式执行:移除第二离型衬垫层205(由与第一离型衬垫层相同的材料制成)以曝露胶粘剂层204,随后通过胶粘剂层204应用于基底表面上。然后胶粘剂层204可紧贴基底放置,将清洁装置220粘附至基底。基底可为现有技术中描述的具有不同目的的多种不同材料。
46.上文描述的清洁垫层202及下文描述的清洁垫层可为清洁材料提供预定的机械特性、材料特性及尺寸(维度,dimensional)特性。例如,清洁垫层可提供磨蚀性、比重(例如范围为0.75至2.27,其中比重为在特定温度下密度与水的密度的比率)、弹性(例如范围为40-mpa至600-mpa)、粘性(例如范围为20克至800克)、平面度及厚度(例如范围在25-um与500-um之间)。
47.一个或多个中间层203(其如上文所描述可为顺应性的,如下文所描述为刚性的,或者如下文所描述为顺应性层及刚性层的组合)可为清洁材料提供预定的机械特性、材料特性及尺寸特性。例如,一个或多个中间层可提供磨蚀性(下文更详细地描述)、比重(例如范围为0.75至2.27,其中比重为在特定温度下一个或多个中间层的密度与水的密度的比率)、弹性(例如范围为40-mpa至600-mpa)、粘性(例如范围为20克至800克)、平面度、厚度(例如范围在25-um与500-um之间)和/或孔隙率(例如范围为每英寸10至150个微孔,孔隙率为每英寸平均孔数)。
48.在图7b所示的另一实施方式中,清洁介质220可由清洁垫层202与在清洁垫层202下方的一个或多个中间刚性层206制成,一个或多个中间刚性层206支撑清洁垫层202。对于另一实施方式(图7c),清洁介质220可使用在具有预定性质的清洁垫层202下方的一个或多个中间刚性层206及一个或多个顺应性203材料层的组合来构成。应注意,尽管图7c中的实施方式具有在清洁垫202与一个或多个刚性层206之间的一个或多个顺应性层203,但是实
施方式可替代地具有紧接在清洁垫层202下方的一个或多个刚性层及在刚性层206下方的一个或多个顺应性层。亦应注意,图7b及图7c中的实施方式亦具有如上文所描述的两个保护衬垫层201、205及胶粘剂层204。
49.图7d示出其中清洁介质220为由在具有预定性质的清洁垫层202下方的交替的一个或多个中间刚性材料层206及一个或多个顺应性材料层203构成的实施方式。在此实施方式中,清洁介质220具有在清洁垫202下方的一个或多个顺应性层203,且然后为一个或多个刚性层206及一个或多个顺应性层203,尽管清洁介质220可具有以在本公开内容的范围内的不同配置交替的顺应性层及刚性层。在此实施方式中,清洁垫202及底层(203、206等)将具有预定的磨蚀性、密度、弹性和/或粘性性质,所述性质有助于清洁拾取工具接触表面、侧面及真空入口/出口。清洁层及中间材料层的性质的叠加可根据拾取工具接触表面、侧面及真空入口/出口的特定配置及几何特征而变化。
50.清洁垫层202的磨蚀性将使碎屑从拾取工具接触表面、侧面及真空入口/出口松开且将碎屑剪碎。使用预定体积密度及质量密度的磨料颗粒;清洁材料的磨蚀性可受到系统性地影响,以便促进碎屑移除。清洁材料层内典型的磨料及颗粒重量百分比负载的范围可为30重量%至500重量%。如本文所使用,聚合物负载的重量百分比被定义为聚合物的重量除以聚合物的重量加上磨料颗粒的重量。可掺入于材料中的典型磨料可包括氧化铝、碳化硅及金刚石,尽管磨料亦可为其他众所周知的磨料。磨料可包括空间上分布的或优选地分布的氧化铝、碳化硅或金刚石的颗粒,尽管磨料颗粒亦可为莫氏硬度为7或更高的其他众所周知的磨料材料。清洁层的受控表面粘性将致使拾取工具接触表面、侧面及真空入口/出口上的碎屑优先地粘附至垫且因此在清洁操作中从拾取工具接触表面、侧面及真空入口/出口移除。
51.在一个实施方式中,清洁材料层202和/或中间刚性层206和/或中间顺应性层203(每个均为“材料层”)可由基于固体或泡沫的、带有开放或封闭孔的弹性材料制成,所述弹性材料可包括橡胶以及合成及天然聚合物两者。每个材料层可具有范围在大于40-mpa至小于600-mpa之间的弹性模量,且层的厚度范围可在25-um或更大与小于或等于500-um之间。每个材料层可具有在30肖氏硬度a或更大与不超过90肖氏硬度a之间的层硬度范围。清洁层及胶粘剂层可具有在-50c至 200c之间的服务范围。每种弹性材料可为制造成具有预定粘性或空间上或优选地分布在材料的主体内的磨料颗粒的材料。每种材料可具有预定的弹性、密度及表面张力参数,所述参数可允许拾取工具接触表面、侧面及真空入口/出口以穿过弹性材料层且移除真空拾取工具上的碎屑而不会损坏拾取工具接触表面、侧面及真空入口/出口的几何特征,同时保持弹性基质的完整性。每个材料层将具有通常在1密耳与20密耳厚之间的预定厚度。每个层的厚度可根据拾取工具接触表面、侧面及真空入口/出口的特定配置而变化。例如,薄的材料清洁材料层(~1密耳厚)将适合于诸如扁平管的“非穿过性(non-penetrating)”几何形状,且厚的材料清洁层(~20密耳)将非常适合于“穿过性(penetrating)”管几何形状。作为自动、半自动或手动清洁的正常操作期间清洁垫的一个或多个组装元件及组装装备的支撑硬件,竖直接触力将接触元件驱动至清洁垫中,其中接触表面、侧面及真空入口/出口的拾取工具上的碎屑将被垫材料移除且保留。
52.在清洁介质221的其他实施方式(在图8a及图8b中展示出)中,可使用具有预定纵横比(直径对高度)、横截面(正方形、圆形、三角形等)的多个形状均匀且有规律地间隔的几
何微特征212(诸如微柱或微角锥)来提高清洁材料的最大清洁效率。在图8a的实施方式中,间隔开的微特征由在具有预定的预定性质的中间顺应性层或刚性层207的组合的顶部上且横跨该组合上的单个层212构成。作为一种类型的微特征构造的实例,可使用精密制造工艺和/或受控切割方法的组合来产生图8a所示的正方形微柱,由此主轴具有100微米或更小的尺寸且“横向路径”及“竖向路径”宽度小于50微米。“横向路径”及“竖向路径”的深度由切割方法控制以便实现纵横比。在此实例中,特征具有100微米的主轴宽度对200微米的深度(或高度)。在此构造中,在不切穿清洁材料层或切入底层中的情况下实现深度。在图8b的实施方式中,均匀间隔的微特征可由具有预定性质的中间顺应性层或刚性层207的多个层213构成。微特征的大小及几何形状可根据拾取工具接触表面、侧面及真空入口/出口的配置及材料而变化,以实现将会移除碎屑但不会损坏拾取工具接触表面、侧面及真空入口/出口的垫。若微特征相对于接触元件几何形状较大,这将不利地影响清洁性能。若微特征相对于接触元件几何形状较小,则往复力将不足以促进移除粘附的污染物的高清洁效率。
53.通常,微特征可具有若干类型的几何形状,包括圆柱形、正方形、三角形、矩形等。每个微特征的主轴中的横截面大小可大于或等于25-um且小于500-um,且每个微特征可具有范围在1:10至20:1之间的纵横比(高度对宽度)。微特征的几何形状可在清洁层的制造期间进行调整,使得该材料可用于翻新拾取工具接触表面、侧面及真空入口/出口。
54.在图9a及图9b的实施方式中展示出具有微特征的清洁材料的放大剖视图(图9a中的微柱219及图9b中的微角锥319分别为清洁材料224、324的特征);尽管此类特征亦可为任何其他规则的几何特征。微特征在负载作用下的挠曲不仅取决于负载,而且取决于特征的横截面的几何形状。
55.在图9a的实施方式中,微柱间隔或间距215、面积惯性矩216或第二惯性矩(形状的性质)两者可用于预测特征对弯曲及挠曲的抵抗性,清洁垫长度217、中间垫长度218及微柱总长度219根据拾取工具接触表面、侧面及真空进口/出口的特定配置预先确定。对于拾取工具接触表面、侧面及真空入口/出口,微柱几何形状使得清洁特征可适配“于入口/出口”中并且沿着工具侧面进行实体接触以提供清洁作用及碎片收集。在此实例中,真空入口/出口可具有125微米的直径。对于清洁材料,特征主要横截面轴线长度将小于125微米且高度将为至少60微米以促进超程(过调,overtravel)进入清洁材料。
56.图9b中,微角锥顶点间隔或间距315及沿着高度的可变惯性矩316、清洁垫角锥长度317、截头角锥高度318及微角锥总高度319类似地根据真空拾取工具的特定配置预先确定。作为实例,微角锥几何形状使得清洁材料可适配于拾取工具接触表面、侧面及真空入口/出口中以在拾取工具接触表面、侧面及真空入口/出口内部且沿着拾取工具的侧面提供清洁作用及碎屑收集。对于特定的拾取工具配置,微特征几何形状使得清洁特征可适配于拾取工具接触表面、侧面及真空入口/出口中且沿着拾取工具接触表面、侧面及真空入口/出口的侧面进行适配以提供清洁作用及碎屑收集。微特征的形状在使用精密切割工艺的情况下将由切缝(即“横向路径宽度及形状”及“竖向路径宽度及形状”)界定,或者在使用浇铸工艺的情况下经由模制形状界定。对于清洁材料的微特征,微特征顶表面的主要横截面轴线长度将小于125微米以促进拾取夹头内的清洁。整体高度将为至少200微米以促进超程进入清洁材料且提供足够的往复力以开始清洁和/或材料移除动作。
57.上文描述的微特征可具有应用于顶表面、沿着微特征的长度应用、在微特征的主
体内应用或在微特征的底部处应用的磨料颗粒。在一个实施方式中,平均微特征可具有1.0-μm或更大的横截面宽度、400-μm或更小的高度及小于15.0-μm的平均磨料颗粒大小。可掺入于材料层及微特征中且横跨材料层及微特征上的典型磨料可包括氧化铝、碳化硅及金刚石,尽管磨料颗粒亦可为莫氏硬度为7或更高的其他众所周知的磨料。添加至微特征的磨料的量及大小可根据拾取工具接触表面及真空入口/出口的配置及材料而变化,以实现将会移除并收集碎屑但不造成损坏的垫。
58.图10a、图10b及图10c为分别例示出清洁材料226及326的实施方式的图,其中使用横向路径351、竖向路径352及对角线353的预定阵列将微特征相互解耦且形成为具有预定的惯性矩,以移除不期望的相互作用及其他耦接效应且获得预定的表面顺应性,使得当真空拾取工具接触垫表面时,材料向接触区域中、在接触元件尖端几何形状及支撑结构内给予往复力以提高移除碎屑及污染物的效率。横向路径、竖向路径及对角线大小的宽度可根据真空拾取工具的配置及材料而变化,以实现解耦的材料表面,从而均匀地移除来自接触元件的侧面及在几何特征接触元件尖端内的碎屑。横向路径、竖向路径及对角线可具有横跨宽度均匀地或优选地分布的磨料颗粒。横向路径、竖向路径及对角线的宽度以及横跨宽度上的磨料的大小可根据拾取工具接触表面、侧面及真空入口/出口的配置及材料而变化。在这些实施方式中,清洁材料的每个岛状物360为与其他微特征分开的微特征。
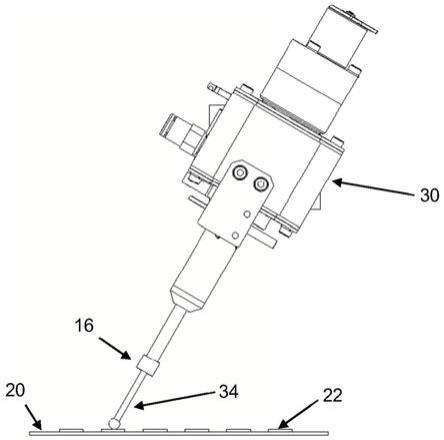
59.清洁系统及清洁垫不仅从拾取工具接触表面、侧面及真空入口/出口移除并收集粘附的颗粒,而且不影响整体形状及几何性质。将拾取工具接触表面、侧面及真空入口/出口插入至清洁装置(诸如图6a所示的装置,载体装置20;图6b的基底装置21;及图6c的仿真封装装置22)中会移除粘附的碎屑及支撑硬件,而不会留下随后必须利用额外的联机或脱机工艺来移除的任何有机残留物。
60.对拾取工具接触表面、侧面及真空入口/出口进行原位清洁的方法可实现在不从操纵机器移除工具的情况下清洁拾取工具的目的,从而减少停机时间且提高生产率。将清洁材料安装于在预定义位置处的清洁块或台上,且当手动地、半自动地或自动地开始清洁算法时,机器将拾取工具移动至已安装清洁材料的预定义位置且然后将拾取工具插入至清洁材料中。装置的清洁材料层根据拾取工具接触表面、侧面及真空入口/出口的配置及材料具有预定的实体性质、机械性质及几何性质。
61.图11a中展示出具有适合于清洁锥形真空拾取工具(101)的微特征的清洁材料的实施方式;图11b中展示出吸盘真空拾取工具(102);且图11c中为多侧面真空夹头拾取工具(103)。对于此例示性实例,展示出标准拾取工具,但未展示出操纵机器的其他众所周知的部件。清洁材料324安装于载体基底20(如图11a至图11c所示)或清洁区域基底500上。在执行清洁期间,操纵机器将被程序化来(手动地、半自动地和/或自动地)移动至清洁块/垫的位置,使得拾取工具可被插入至清洁材料中。当清洁材料324被驱动而与默认定的竖直位置形成接触时,按指定之间隔或“按需”清洁拾取工具。
62.图11a至图11c所示的清洁材料324可具有如上文所描述的微特征。可使用微特征(其可为微柱),其中清洁装置的几何特征具有间隔、几何形状,且微柱的磨蚀性使得拾取工具上的往复压力给予有效的清洁以移除并收集碎屑。微柱之间隔215、惯性矩216及总长度219基于拾取工具接触表面、侧面及真空入口/出口直径(101、102、103)的配置及材料进行组配。当使拾取工具(101、102、103)运动至清洁材料324中时,从表面以及入口/出口的内部
移除碎屑。可控制垫/聚合物/基底层及表面微特征的数目以提供对清洁装置的整体厚度以及清洁厚度的顺应性的控制。此多层实施方式为多侧面真空夹头拾取工具的内部提供了有效的“边缘侧”清洁。
63.如上文所描述,清洁操作不会以任何方式影响操纵机器的操作,因为对拾取工具接触表面、侧面及真空入口/出口的清洁为在正常操作期间实现。以此方式,清洁操作为低成本的且准许在没有过多的停机时间及通过量损失的情况下清洁拾取工具接触表面、侧面及真空入口/出口。
64.在图12a至图13c所示的微特征实施方式中,可使用微特征(图12a至图12c中的微柱224或图13a至图13c中的微角锥结构324),其中清洁装置的几何特征具有间隔、几何形状,且微角锥的磨蚀性使得拾取工具上的往复压力给予有效的清洁以移除并收集碎屑。利用具有宽度及深度的横向路径350、竖向路径351及对角线352对微特征进行的解耦根据拾取工具接触表面、侧面及真空入口/出口的配置及材料预先确定。可控制垫/聚合物/基底层及表面微特征的数目以提供对清洁装置的整体厚度以及清洁厚度的顺应性的控制。此多层实施方式为多侧面真空夹头拾取工具的内部提供了有效的“边缘侧”清洁。
65.图14a为使用清洁装置进行清洁之前的真空夹头1400的实例,且图14b为使用清洁装置进行清洁之后的真空夹头1400的实例。真空夹头1400具有接触表面1402,接触表面1402为具有内部空隙区域的圆形形状。如图14a所示,未清洁的真空夹头1400在用于取放机的接触表面1402上具有在重复的拾取及放置动作之后累积的一个或多个碎屑片1404。粘附的碎屑1404将影响夹头与被拾取及放置的装置之间的真空密封质量,从而减小真空力。碎屑片1404导致需要非时间表的停机时间来手动地清洁碎屑并恢复夹头性能。当使用上文公开的清洁材料及清洁过程来清洁真空夹头时,使真空夹头与清洁材料的表面接触,且从接触表面1402且沿着夹头尖端的侧面移除粘附的碎屑,如图14b所示。根据需要,可将夹头多次致动至清洁聚合物中以移除粘附的碎屑。可在不使系统脱机来进行非时间表维护的情况下执行如图14b所示的对夹头接触表面1402的清洁。
66.为了说明的目的,已经参考特定实施方式描述了前文的描述。然而,上文的例示性论述不欲为详尽的或将本公开内容限于所公开的精确形式。鉴于上文的教导,许多修改及变型为可能的。对实施方式进行选择及描述以便最好地说明本公开内容的原理及其实际应用,从而使其他本领域技术人员能够最好地利用本公开内容及具有各种修改的各种实施方式,所述修改适合于所涵盖的具体用途。
67.本文所公开的系统及方法可经由一个或多个部件、系统、服务器、器具、其他子部件来实现或者可分布在此类部件之间。当实现为系统时,此类系统可包括且/或尤其涉及通用计算机中所见的部件,诸如软件模块、通用cpu、ram等。在创新存在于服务器上的实施方案中,此种服务器可包括或涉及诸如cpu、ram等部件,诸如通用计算机中所见的部件。
68.另外,本文中的系统及方法可经由超出上文阐述的、具有完全不同的或整个不同的软件、硬件和/或固件部件的实施来实现。关于与本发明相关联或体现本发明的此类其他部件(例如,软件、处理部件等)和/或计算机可读媒体,例如,本文中的创新的方面可与众多通用或专用计算系统或配置相一致地实施。可适合于与本文中的创新一起使用的各种实例计算系统、环境和/或配置可包括但不限于:个人计算机、服务器或服务器计算装置内的或体现在其上的软件或其他部件,诸如路由/连接部件、手持式或膝上型装置、多处理器系统、
基于微处理器的系统、机顶盒、消费性电子装置、网络pc、其他现有的计算机平台、包括以上系统或装置中的一者或多者的分布式计算环境等。
69.在一些情况中,系统及方法的方面可经由例如与此类部件或电路相关联地执行的包括程序模块的逻辑和/或逻辑指令来实现或由所述逻辑和/或逻辑指令来执行。通常,程序模块可包括执行特定任务或实施本文中的特定指令的例程、程序、对象、部件、数据结构等。本发明亦可在分布式软件、计算机或电路设定的情境中实践,其中电路经由通讯总线、电路或链路进行连接。在分布式设定中,控制/指令可从本端及远程计算机储存媒体(包括内存储存装置)两者发生。
70.本文中的软件、电路及部件亦可包括且/或利用一或多种类型的计算机可读媒体。计算机可读媒体可为驻留在此类电路和/或计算部件上、可与此类电路和/或计算部件相关联或可由此类电路和/或计算部件存取的任何可用媒体。作为实例而非限制,计算机可读媒体可包含计算机储存媒体及通讯媒体。计算机储存媒体包括以任何方法或技术实施以便储存诸如计算机可读指令、数据结构、程序模块或其他数据的信息的依电性媒体及非依电性媒体、可移除式媒体及不可移除式媒体。计算机储存媒体包括但不限于:ram、rom、eeprom、闪存或其他内存技术、cd-rom、数字通用磁盘(dvd)或其他光学储存器、磁带、磁盘储存器或其他磁性储存装置,或可用来储存所要信息且可由计算部件存取的任何其他媒体。通讯媒体可包含计算机可读指令、数据结构、程序模块和/或其他部件。此外,通讯媒体可包括诸如有线网络或直接有线连接的有线媒体,然而,本文中任何此种类型的媒体都不包括暂时性媒体。以上各项中的任一者的组合亦包括于计算机可读媒体的范围内。
71.在本说明书中,术语部件、模块、装置等可指代可以多种方式实现的任何类型的逻辑或功能软件部件、电路、方块和/或过程。例如,各种电路和/或方块的功能可彼此组合成任何其他数目个模块。每个模块甚至可实现为储存在有形内存(例如,随机存取内存、只读存储器、cd-rom内存、硬盘驱动机等)上的软件程序以由中央操纵单元读取来实现本文中的创新的功能。或者,模块可包含经由传输载波传输至通用计算机或操纵/图形硬件的程序设计指令。模块亦可实现为实现本文中的创新所涵盖的功能的硬件逻辑电路。最后,可使用专用指令(simd指令)、场可编程逻辑阵列或其任何混合物来实现模块,该混合物提供所要等级的性能及成本。
72.如本文所公开的,可经由计算机硬件、软件和/或固件来实施与本公开内容一致的特征。例如,本文所公开的系统及方法可以各种形式来体现,包括例如数据处理器,诸如计算机,亦包括数据库、数字电子电路、固件、软件或其组合。此外,尽管所公开的实施方案中的一些描述了特定的硬件部件,但是与本文中的创新一致的系统及方法可利用硬件、软件和/或固件的任何组合来实现。此外,本文中的创新的上述特征及其他方面及原理可在各种环境中实现。此类环境及相关应用可被特别地构造用于执行根据本发明的各种例程、过程和/或操作,或者它们可包括由程序代码选择性地启动或重新组配以提供必要功能的通用计算机或计算平台。本文所公开的过程并非固有地与任何特定计算机、网络、架构、环境或其他设备相关,且可由硬件、软件和/或固件的合适组合来实现。例如,各种通用机器可与根据本发明的教导编写的程序一起使用,或可能更为方便的是,构造专用的设备或系统来执行所需的方法及技术。
73.本文所描述的方法及系统的方面,诸如逻辑,亦可作为编程至多种电路(包括可编
程的逻辑装置(“pld”),诸如场可编程门阵列(“fpga”)、可编程阵列逻辑(“pal”)装置、电可编程逻辑及内存装置及基于标准单元的装置以及特殊应用集成电路)中的任一者中的功能而实施。实施方面的一些其他可能性包括:内存装置、具有内存(例如eeprom)的微控制器、嵌入式微处理器、固件、软件等。此外,方面可体现在具有基于软件的电路仿真、离散逻辑(顺序及组合)、定制装置、模糊(神经)逻辑、量子装置及以上装置类型中的任一者的混合物的微处理器中。可在多种部件类型中提供基础的装置技术,例如,金属氧化物半导体场效应晶体管(“mosfet”)技术(例如互补金属氧化物半导体(“cmos”))、双极技术(例如射极耦合逻辑(“ecl”))、聚合物技术(例如,硅共轭聚合物及金属共轭聚合物金属结构)、混合的仿真及数字技术等。
74.亦应注意,本文所公开的各种逻辑和/或功能就其行为、缓存器转移、逻辑部件和/或其他特性而言可使用硬件、固件的任何数目个组合来实现,且/或作为体现在各种机器可读或计算机可读媒体中的数据和/或指令来实现。可在其中体现此类格式化的数据和/或指令的计算机可读媒体包括但不限于各种形式的非依电性储存媒体(例如,光学、磁性或半导体储存媒体),但是同样不包括暂时性媒体。除非上下文清楚地另有要求,否则贯穿说明书的用词“包含”及类似者应被解释为包括性意义,而不是排他性或详尽意义;亦即,“包括但不限于”的意义。使用单数或复数的用词亦分别包括复数或单数。另外,用词“在本文中”、“在下文中”、“上文”、“下文”及类似含义的用词是指整个本技术,且不是指本技术的任何特定部分。当在提及两个或更多个项目的列表中使用用词“或”时,该用词涵盖对该用词的所有以下解释:列表中项目的任一者、列表中的所有项目、以及列表中的项目的任何组合。
75.尽管本文已经具体描述了本发明的某些当前优选的实施方案,但是对于本发明所属领域的技术人员而言明晰的是,可在不脱离本发明的精神及范围的情况下对本文中所展示并描述的各种实施方案做出改变和修改。因此,意图是仅在适用法律规则所要求的程度上对本发明进行限制。
76.尽管前述内容已经参考本公开内容的特定实施方式,但是本领域技术人员将了解,可在不脱离本公开内容的原理及精神的情况下对此实施方式做出改变,本公开内容的范围由所附权利要求限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。