技术特征:
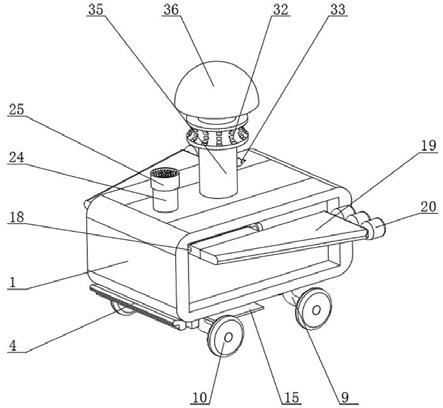
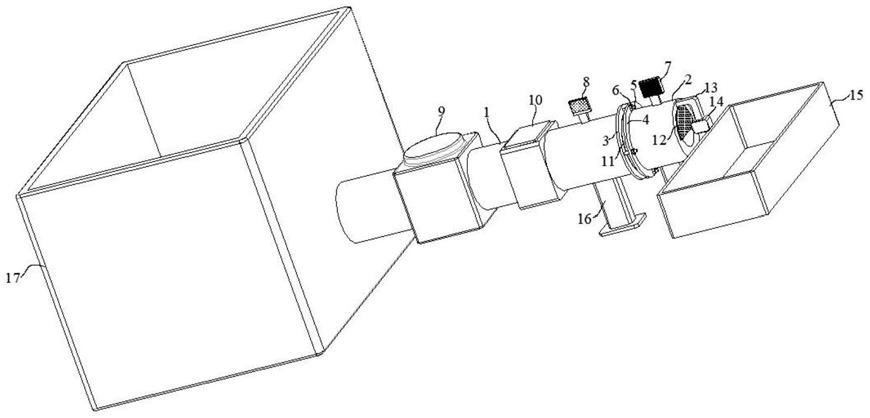
1.一种基于夜间作业的可视对讲气体检测机器人,包括机箱(1),其特征在于:所述机箱(1)的底部固定安装有红外线测量模块(4),所述机箱(1)的下表面对称固定安装有轮架(9),所述轮架(9)的两端对称转动安装有独立控制轮(10),所述机箱(1)的两侧外壁对称转动安装有电动转轴(18),所述电动转轴(18)的外壁固定安装有机翼(19),所述机翼(19)的一侧外壁的固定安装有飞行动力喷射(20),所述轮架(9)的下表面对称固定安装有辅助动力喷射(21)。2.根据权利要求1所述的一种基于夜间作业的可视对讲气体检测机器人,其特征在于:所述机箱(1)的下表面固定安装有自动转轴(13),所述自动转轴(13)的外壁转动安装有底板(12),所述底板(12)的下表面固定安装有液压杆(14),所述液压杆(14)的输出端固定安装有垫板(15),所述垫板(15)的下表面对称固定安装有防滑凸起(16)。3.根据权利要求2所述的一种基于夜间作业的可视对讲气体检测机器人,其特征在于:所述机箱(1)的内部设有工作模块(22),所述工作模块(22)的内部包含有抽真空机(23)、吸气筒(24)、过滤网(25)、单向进气阀(26)、进气孔(27)和气体检测模块(28),所述机箱(1)的内壁固定安装有抽真空机(23),所述机箱(1)的内壁上表面设有气体检测模块(28)。4.根据权利要求3所述的一种基于夜间作业的可视对讲气体检测机器人,其特征在于:所述机箱(1)的上表面固定安装有吸气筒(24),所述吸气筒(24)的外壁顶部固定安装有过滤网(25),所述吸气筒(24)的内壁顶部固定安装有单向进气阀(26),所述吸气筒(24)的外壁底部对称开设有进气孔(27)。5.根据权利要求4所述的一种基于夜间作业的可视对讲气体检测机器人,其特征在于:所述机箱(1)的上表面固定安装有圆柱筒(35),所述圆柱筒(35)的上表面固定安装有隔离板(36),所述隔离板(36)的下表面对称开设有通风孔(37),所述圆柱筒(35)的内部上表面固定安装有调温仪(38)。6.根据权利要求5所述的一种基于夜间作业的可视对讲气体检测机器人,其特征在于:所述隔离板(36)的上表面固定安装有内环(39),所述内环(39)的内壁顶部转动安装有多角度调节装置(40),所述多角度调节装置(40)的下表面固定连接有视频传输模块(41)。7.一种基于夜间作业的可视对讲气体检测机器人的检测系统,包括音频输入模块(2),其特征在于:所述音频输入模块(2)的输出端信号连接有中央控制处理器(3),所述中央控制处理器(3)的内部包含有红外线测量模块(4)、地面行走模块(8)、转向模块(11)和飞行模块(17),所述中央控制处理器(3)的输出端信号连接有红外线测量模块(4),所述红外线测量模块(4)的内部包含有纵向红外波发射单元(5)、横向红外波发射单元(6)和数据分析单元(7),所述数据分析单元(7)的输出端信号连接有地面行走模块(8)、转向模块(11)和飞行模块(17)。8.根据权利要求7所述的一种基于夜间作业的可视对讲气体检测机器人的检测系统,其特征在于:所述中央控制处理器(3)的输出端信号连接有工作模块(22),所述工作模块(22)的输出端信号连接有气体检测模块(28),所述气体检测模块(28)的内部包含有有氧浓度检测单元(29)、气体湿度检测单元(30)和酸碱性检测单元(31)。9.根据权利要求8所述的一种基于夜间作业的可视对讲气体检测机器人的检测系统,其特征在于:所述中央控制处理器(3)的输出端信号连接有照明模块(32)、温度检测模块(33)、温度控制模块(34)和视频传输模块(41)。
10.根据权利要求9所述的一种基于夜间作业的可视对讲气体检测机器人的检测系统,其特征在于:所述气体检测模块(28)的输出端信号连接有后台监测模块(42),所述气体检测模块(28)的输出端信号连接有后台监测模块(42)的输出端信号连接有云端共享数据模块(43),所述云端共享数据模块(43)的内部包含有储存模块(44)和数据加密模块(45)。
技术总结
本发明公开了一种基于夜间作业的可视对讲气体检测机器人,涉及气体检测相关技术领域,包括机箱,机箱的底部固定安装有红外线测量模块,机箱的下表面对称固定安装有轮架。本发明还公开了一种基于夜间作业的可视对讲气体检测机器人的检测系统,包括音频输入模块,音频输入模块的输出端信号连接有中央控制处理器,中央控制处理器的内部包含有红外线测量模块、地面行走模块、转向模块和飞行模块。本发明通过设置独立控制轮,飞行动力喷射和辅助动力喷射,使该装置在不同的路段选择不同的移动方式,一方面能有效地增加机器人的工作范围,使该机器人具备更高的灵活性,另一方面通过还能够有效地避免路段中的撞击。能够有效地避免路段中的撞击。能够有效地避免路段中的撞击。
技术研发人员:魏晋宏 林建雄 乔远峰 王圣惠 任俊虎 孙启瑞
受保护的技术使用者:山西三合盛智慧科技股份有限公司
技术研发日:2021.12.22
技术公布日:2022/4/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。