1.本实用新型涉及空压机技术领域,特别是涉及一种狭小空间圆柱型物品快速抓取工具。
背景技术:
2.立体仓库能够充分利用空间实现存储功能。但是,立体仓库一般空间间隔都比较小,无法采用大型的设备进行上下料,尤其针对小型圆柱形零部件均采用人工的方式进行取放,效率低下。
技术实现要素:
3.本实用新型所要解决的技术问题是:为了克服现有技术中的不足,本实用新型提供一种狭小空间圆柱型物品快速抓取工具。
4.本实用新型解决其技术问题所要采用的技术方案是:一种狭小空间圆柱型物品快速抓取工具,包括上安装板、下安装板以及抓取组件,所述上安装板和下安装板相互扣合,且在扣合面之间设有用于容纳抓取组件的安装槽,所述抓取组件设置在安装槽内,且抓取组件的多个手指向下延伸出下安装板,所述手指沿周向均匀分布,且手指能够向其分布中心同时靠近或远离。
5.具体的,所述抓取组件包括抓取气缸、叉形接头、第一转轴、第一连杆、转盘、第二转轴、以及多个手指组件,所述叉形接头固定连接在抓取气缸的推杆前端,且第一连杆的一端插入叉形接头的叉口内,并通过第一转轴转动连接,第一转轴一端设有限位凸台,另一端穿过叉形接头和第一连杆后端部通过卡簧固定;所述第一连杆的另一端与转盘固定连接;所述手指组件沿转盘周向均匀分布,且手指组件的一端通过第二转轴转动连接在转盘的外缘,所述手指组件的另一端向下延伸出下安装板形成用于抓取的手指。
6.进一步,所述手指组件包括第二连杆、第三转轴、叉形连杆、连接柱以及指套,所述第二连杆的一端通过第二转轴与转盘连接,所述第二连杆的另一端插入叉形连杆的叉口内,且通过第三转轴转动连接,所述叉形连杆的另一端上固定连接所述连接柱,所述连接柱向下延伸穿过下安装板上的腰圆形滑槽且端部套设弹性指套形成用于抓取的手指;所述连接柱能够在腰圆形滑槽内滑动。腰圆形滑槽的沿转盘的径向延伸,对手指的靠近和远离起到导向作用。
7.进一步,为了减小装配空间,所述转盘的侧面上设有周向延伸的条形槽,所述条形槽的数量与所述手指组件数量匹配,所述第二连杆的一端插入条形槽内,且通过第二转轴转动连接在转盘的条形内。
8.进一步,为了保证第一连杆带动转盘转动的精度和准确度,所述转盘顶部沿径向开设有限位槽,所述第一连杆设置在限位槽内。通过限位槽可以限制转盘与第一连杆同步动作,从而保证抓取的稳定性。
9.具体的,为了使抓取动作顺畅,所述安装槽包括转盘限导向限位槽、叉形连杆导向
槽、第二连杆导向槽、抓取气缸固定槽以及气缸推杆导向槽。
10.为了实现与机器人的连接,还包括机器人连接机构,所述机器人连接机构包括旋转气缸和转接板,所述旋转气缸的摆动端通过螺钉固定连接在上安装板和下安装板上,所述转接板固定在旋转气缸的缸体上。
11.与机器人端连接的转接板可以根据具体需求进行设计和选择,作为优选,所述转接板包括气缸连接端和机器人连接端,所述气缸连接端和机器人连接端一体连接形成l型,所述气缸连接端上设有竖直方向贯穿的过线孔和第一螺钉孔;所述机器人连接端上设有水平方向贯穿的第二螺钉孔。
12.进一步,为了实现与机器人端的安装,所述机器人连接端的中部设有加厚凸台,所述加厚凸台上设有与第二螺钉孔轴线平行的安装孔。
13.本实用新型的有益效果是:本实用新型提供的一种狭小空间圆柱型物品快速抓取工具,用于立体仓库中小型圆柱形零部件抓取,采用气缸作为动作动力来源,调试完成使用标准工作气压可快速对物品进行抓取。连接机器人侧的机构可根据机器人型号不同进行修改。
附图说明
14.下面结合附图和实施例对本实用新型作进一步说明。
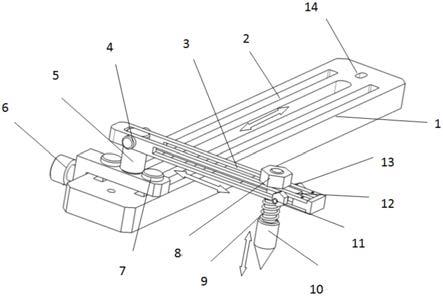
15.图1是本实用新型抓取工具的结构示意图。
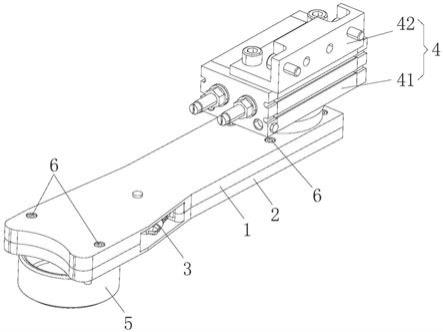
16.图2是本实用新型抓取工具的结构示意图(隐藏上安装板)。
17.图3是抓取工具的底面结构示意图。
18.图4是上安装板的结构示意图。
19.图5是下安装板的结构示意图。
20.图6是图2中抓取组件处的放大结构示意图。
21.图7是抓取组件的结构示意图。
22.图8是转盘的结构示意图。
23.图9是手指组件的结构示意图。
24.图10是转接板的结构示意图。
25.图中:1、上安装板,11、转盘限导向限位槽,12、叉形连杆导向槽,13、第二连杆导向槽,14、抓取气缸固定槽,15、气缸推杆导向槽,2、下安装板,21、引线孔,22、腰圆形滑槽,3、抓取组件,31、抓取气缸,32、叉形接头,33、第一转轴,34、第一连杆,35、转盘,351、条形槽,352、限位槽,353、螺钉孔,354、轴孔,36、第二转轴,37、手指组件,371、第二连杆,372、第三转轴,373、叉形连杆,374、连接柱,375、指套,38、气管接头,39、卡簧,4、机器人连接机构,41、旋转气缸,42、转接板,42a、气缸连接端,42b、机器人连接端,421、过线孔,422、第一螺钉孔,423、第二螺钉孔,424、加厚凸台,425、安装孔,5、圆柱型物品,6、紧固螺钉。
具体实施方式
26.现在结合附图对本实用新型作详细的说明。此图为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
27.如图1-图5所示,本实用新型的一种狭小空间圆柱型物品5快速抓取工具,包括上
安装板1、下安装板2、抓取组件3、机器人连接机构4,所述上安装板1和下安装板2相互扣合,且在扣合面之间设有用于容纳抓取组件3的安装槽,所述抓取组件3设置在安装槽内,然后通过紧固螺钉6将上安装板1和下安装板2连接固定在一起。安装槽包括转盘限导向限位槽11、叉形连杆导向槽12、第二连杆导向槽13、抓取气缸固定槽14以及气缸推杆导向槽15,抓取气缸固定槽14的旁边还设有引线孔21,用于给抓取气缸31提供气源的气管穿过。机器人连接机构4包括旋转气缸41和转接板42,所述旋转气缸41的摆动端通过螺钉固定连接在上安装板1和下安装板2上,所述转接板42固定在旋转气缸41的缸体上。
28.如图6-图9所示,抓取组件3包括抓取气缸31、叉形接头32、第一转轴33、第一连杆34、转盘35、第二转轴36以及多个手指组件37,所述叉形接头32固定连接在抓取气缸31的推杆前端,且第一连杆34的一端插入叉形接头32的叉口内,并通过第一转轴33转动连接,第一转轴33一端设有限位凸台,另一端穿过叉形接头32和第一连杆34后端部通过卡簧39固定;所述第一连杆34的另一端与转盘35固定连接;转盘35的侧面上设有周向延伸的条形槽351,所述条形槽351的数量与所述手指组件37数量匹配,条形槽351上下侧的转盘35上设有贯穿转盘35且上下对正的轴孔354,用于第二转轴36的安装;所述转盘35顶部沿径向开设有限位槽352,限位槽352侧向开口,开口处延伸至侧壁面,所述第一连杆34设置在限位槽352内,限位槽352内还设有用于连接的螺钉孔353。通过限位槽352可以限制转盘35与第一连杆34同步动作,从而保证抓取的稳定性。抓取气缸31上还设有用于连接气管的气管接头38。
29.手指组件37数量根据需求进行设置,至少为2个,本实施例中手指组件37为3个,3个手指组件37沿转盘35周向均匀分布,手指组件37包括第二连杆371、第三转轴372、叉形连杆373、连接柱374以及指套375,所述第二连杆371的一端插入条形槽351内,且通过第二转轴36转动连接在转盘35的条形内,所述第二连杆371的另一端插入叉形连杆373的叉口内,且通过第三转轴372转动连接,所述叉形连杆373的另一端上固定连接所述连接柱374,所述连接柱374向下延伸穿过下安装板2上的腰圆形滑槽22且端部套设弹性指套375形成用于抓取的手指;所述连接柱374能够在腰圆形滑槽22内滑动。腰圆形滑槽22的沿转盘35的径向延伸,对手指的靠近和远离起到导向作用。
30.如图10所示,转接板42可以根据具体需求进行设计和选择,本实施例中转接板42包括气缸连接端42a和机器人连接端42b,所述气缸连接端42a和机器人连接端42b一体连接形成l型,所述气缸连接端42a上设有竖直方向贯穿的过线孔421和第一螺钉孔422;所述机器人连接端42b上设有水平方向贯穿的第二螺钉孔423。为了实现与机器人端的安装,所述机器人连接端42b的中部设有加厚凸台424,所述加厚凸台424上设有与第二螺钉孔423轴线平行的安装孔425。
31.工作原理:
32.当需要抓取时,通过旋转气缸41带动上下安装板2转动,调节抓取组件3到圆柱型物品5所在位置,然后通过气压控制抓取气缸31的推杆缩回,通过第一连杆34带动转盘35逆时针转动,使连接柱374沿腰圆形滑槽22向外运动,从而使手指张开,然后通过机器人控制抓取工具使圆柱型物品5位于手指的内部;然后,控制抓取气缸31向外推动第一连杆34,从而使转盘35反向,沿顺时针转动,带动手指向圆柱型物品5靠近,从而实现圆柱型物品5的抓取。
33.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关的工作
人员完全可以在不偏离本实用新型的范围内,进行多样的变更以及修改。本项实用新型的技术范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。