1.本发明属于湿度响应驱动器技术领域,具体涉及一种基于可涂覆聚丙烯酰胺水凝胶高灵敏湿度响应驱动器及其制备方法。
背景技术:
2.水凝胶是一种含有大量水的三维网络交联结构,具有一定柔性、生物相容性等特点在传感器、生物医学等领域被广泛应用和研究。其中,智能响应水凝胶可以在外界环境刺激如温度、ph值、湿度等产生溶胀/去溶胀,从而产生可逆驱动响应性,在智能机器人、生物医学等领域具有潜在的应用前景。
3.研究人员基于水凝胶开发了许多刺激响应驱动器,如四川大学徐世美教授研究小组利用电场诱导硅藻土梯度分布和n-异丙基丙烯酰胺原位自由基聚合制备了具有连续梯度结构的纳米复合温敏性水凝胶驱动器,该驱动器具在一定温度下可以发生弯曲响应。然而由于回复过程依然基于凝胶再溶胀吸水原理,导致回复速度较慢,严重限制了其在智能设备领域的应用。
4.因此,需要开发基于水凝胶的快响应、大变形驱动器。目前,两层结构的驱动器常用于构造基于刺激响应的水凝胶涂层驱动器,但是由于水表面张力比较大,难以紧密涂覆到基质表面,且也面临严重的脱水问题,从而会严重削弱其驱动性能。
技术实现要素:
5.基于目前水凝胶驱动器的响应速度较低或驱动幅度较小,以及水凝胶较低的保水能力,本发明创新性提供了一种可涂覆的聚丙烯酰胺水凝胶的制备方法,并将其与两层疏水聚合物层粘合获得基于可涂覆聚丙烯酰胺水凝胶高灵敏湿度响应驱动器,实现了水凝胶较高的保水能力和在湿度刺激下的高性能驱动响应。在相对湿度差为60%的环境下,本发明湿度响应驱动器的最大弯曲角度在630
°ꢀ‑
297
°
之间,响应时间、恢复时间均在10秒内。
6.为实现上述目的,本发明采用如下技术方案:一种基于可涂覆聚丙烯酰胺水凝胶高灵敏湿度响应驱动器的制备方法,其包括如下步骤:1)通过自由基聚合制备可涂覆聚丙稀酰胺水凝胶:将丙烯酰胺单体和过硫酸铵与交联剂溶液混合后,置于 n
2 气氛中于 35-50℃密封 8-15h,获得可涂覆聚丙烯酰胺水凝胶;2)在聚对苯二甲酸乙二醇酯(pet)薄膜上涂覆一层聚丙烯酸异辛酯胶黏剂,烘干获得胶黏层,然后利用刮涂法将可涂覆聚丙烯酰胺水凝胶涂覆在胶黏层表面,室温放置,获得三层结构的复合薄膜,即为湿度响应驱动器。
7.具体的,步骤1)中,将 0.70-0.75g 丙烯酰胺单体和 0.003-0.004 g 过硫酸铵与9-10 ml 交联剂溶液混合。
8.进一步的,所述交联剂溶液为乙烯基三乙氧基硅烷均匀分散在去离子水中的混合溶液,交联剂溶液质量浓度为0.06
ꢀ‑
0.2% 。
9.具体的,步骤2)中,pet薄膜厚度为5-22微米,胶黏层厚度为12-18微米,可涂覆聚丙烯酰胺水凝胶厚度为22-28微米。
10.进一步优选的,制备所得可涂覆聚丙烯酰胺水凝胶高灵敏湿度响应驱动器的厚度为45-62微米。
11.具体的,步骤2)中,烘干条件为90-110 ℃烘箱放置5-20 min。
12.本发明还提供了采用上述制备方法制备所得的基于可涂覆聚丙烯酰胺水凝胶高灵敏湿度响应驱动器。
13.和现有技术相比,本发明的有益效果如下:1)利用自由基聚合方法和通过对单体质量和聚合时间进行优化,得到了可涂覆的聚丙烯酰胺水凝胶;2)利用了双疏水层设计原理,构建了基于聚丙烯酰胺水凝胶的三层结构复合薄膜的湿度响应驱动器,提高了水凝胶的粘附性能和高保水能力;3)利用水凝胶在适度刺激下发生体积溶胀,构建了对湿度具有较快响应速度和较大变形的湿度响应驱动器;在相对湿度差为60%的环境下,本发明湿度响应驱动器的最大弯曲角度在630
°ꢀ‑
297
°
之间,响应时间、恢复时间均在10秒内;4)本发明湿度响应驱动器度制备简单,且对湿度灵敏度较高,未来可应用于湿度响应智能设备、传感器等。
附图说明
14.图1为可涂覆聚丙稀酰胺水凝胶的红外光谱图;图2为聚丙烯酰胺水凝胶的黏度与单体质量(a)、反应时间(b)之间的关系图;图3为聚丙烯酰胺水凝胶的模量与单体质量(a)、反应时间(b)之间的关系图;图4为聚丙烯酰胺水凝胶pam、pet-pam以及实施例1制备所得三层结构复合薄膜的湿度响应驱动器在红外灯照射下的质量变化曲线;图5为聚丙稀酰胺水凝胶在不同相对湿度差下的溶胀比图;图6为本发明三层结构复合薄膜(即湿度响应驱动器)在相对湿度差为60%下的弯曲角度与时间关系图。
具体实施方式
15.以下结合实施例对本发明的技术方案作进一步地详细介绍,但本发明的保护范围并不局限于此。
16.实施例1一种基于可涂覆聚丙烯酰胺水凝胶高灵敏湿度响应驱动器的制备方法,其包括如下步骤:1)通过自由基聚合制备可涂覆聚丙稀酰胺水凝胶:将 0.75 g 丙烯酰胺单体和 0.0035 g 过硫酸铵添加到 9.5 ml 交联剂溶液中(该交联剂溶液是通过将乙烯基三乙氧基硅烷在去离子水中搅拌 24 小时至油状液滴消失
获得的均匀分散的混合溶液,交联剂溶液质量浓度为0.1%);然后将混合溶液在 n
2 气氛中于 42 ℃密封 12 h,合成获得可涂覆聚丙烯酰胺水凝胶;2)制备基于聚丙烯酰胺水凝胶的三层结构复合薄膜,即湿度响应驱动器:水凝胶的粘附性能和保水性能较差,基于此,本技术基于聚丙烯酰胺水凝胶发明设计了含双疏水层的三层结构复合薄膜作为湿度响应驱动器,具体如下:在pet薄膜(厚度5-22 微米)上涂覆一层聚丙烯酸异辛酯胶黏剂,烘干(100 ℃烘箱放置10 min)获得胶黏层,然后利用刮涂法将可涂覆聚丙烯酰胺水凝胶涂覆在胶黏层表面,室温放置(胶黏层厚度为15微米,可涂覆聚丙烯酰胺水凝胶厚度为25微米),获得三层结构的复合薄膜,即为湿度响应驱动器。
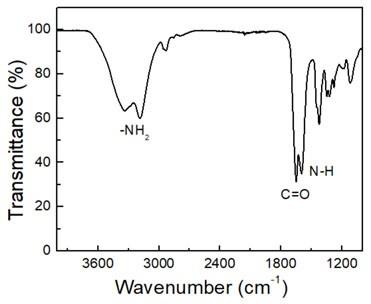
17.图1为步骤1)制备所得的可涂覆聚丙稀酰胺水凝胶的红外光谱图。从图1中可以看出酰胺键的特征峰,其中波数3343 cm-1
为-nh
2 游离特征峰,3186 cm-1
为-nh
2 缔合特征峰,1667 cm-1
为c=o的特征峰,1617 cm-1
为n-h的弯曲振动峰。图1的红外表征结果可以说明制备的水凝胶为聚丙烯酰胺水凝胶。
18.图2为聚丙烯酰胺水凝胶的黏度与单体质量(a)、反应时间(b)之间的关系图。图中看出,随着丙烯酰胺单体质量和反应时间的增加,水凝胶黏度逐渐增加。具体的,从图2中a可以看出,当反应时间为10 h,随着丙烯酰胺单体质量从0.6 g增加到1.4 g,聚丙烯酰胺水凝胶黏度从1970增加到33219 pa
·
s。图2的a中插图为聚丙烯酰胺水凝胶的黏度和剪切速率曲线图,随着剪切速率的增加,水凝胶的黏度逐渐下降,表明聚丙烯酰胺水凝胶剪切变稀的特性。从图2中b可以看出,当丙烯酰胺单体质量浓度固定为0.07 g/ml时,聚合反应时间从5增加到30 h时,聚丙烯酰胺水凝胶黏度从423增加到8396 pa
·
s。
19.图3为聚丙烯酰胺水凝胶的模量与单体质量(a)、反应时间(b)之间的关系图。图中看出,随着丙烯酰胺单体质量和反应时间的增加,水凝胶模量呈逐增趋势。具体的,从图3中a可以看出:当丙烯酰胺单体质量从0.6 g增加到1.4 g,聚丙烯酰胺水凝胶模量从128 增加到669 pa。从图3中b可以看出,当丙烯酰胺单体质量浓度固定为0.07 g/ml时,聚合反应时间从5增加到30 h时,聚丙烯酰胺水凝胶模量从114 增加到249 pa。
20.聚丙烯酰胺水凝胶的黏度、模量越大,越不容易进行涂覆。当聚丙烯酰胺水凝胶的黏度和模量分别在 4000-4200 pa
·
s 和137-153 pa 范围内,该聚丙烯酰胺水凝胶具有较好的涂覆效果。因此,在一定单体质量(0.70-0.75g/ml)和聚合反应时间(10-20h)范围下制备的聚丙烯酰胺水凝胶具有较好的涂覆效果。
21.图4为聚丙烯酰胺水凝胶pam、pet-pam以及实施例1制备所得三层结构复合薄膜的湿度响应驱动器在红外灯照射下的质量变化曲线。图4可以看出:纯的pam水凝胶薄膜在红外灯照射17分钟时失水量为87%,pet-pam复合薄膜的失水量为80%,三层结构复合薄膜的湿度响应驱动器(tri-layer)的失水量约为62%。由此可以推断,该三层结构使水凝胶具有较高的保水能力,在这里,聚丙烯酸异辛酯胶黏剂不仅用于将水凝胶薄膜与聚合物薄膜紧密连接,还用于减少水分子从聚丙烯酰胺水凝胶中的蒸发,从而使本技术三层结构复合薄膜的湿度响应驱动器具有较好的保水能力。
22.聚丙烯酰胺水凝胶层因含有氨基亲水基团,因此可以与水分子作用,在不同湿度下体积会溶胀。图5给出了在不同相对湿度差下聚丙稀酰胺水凝胶薄膜的溶胀比。随着相对湿度差从0%增加到40%时,溶胀比增大到20%。该结果表明聚丙稀酰胺水凝胶薄膜具有较好
较高的吸湿能力,且发生体积膨胀。而高分子聚对苯二甲酸乙二醇酯(pet)具有一定的疏水性,体积不会因湿度发生改变。因此,本发明三层结构复合薄膜层间存在湿度梯度差异,导致在不同湿度刺激下发生弯曲响应,即三层结构复合薄膜从聚丙稀酰胺水凝胶层向聚合物疏水层弯曲。
23.图6给出了在相对湿度差为60%时,不同pet薄膜厚度下本发明三层结构复合薄膜(即湿度响应驱动器)的弯曲角度与时间关系曲线。从图6中可以看出,当三层结构复合薄膜尺寸(裁剪尺寸为15 mm
ꢀ×ꢀ
2 mm), pet薄膜、胶黏层、聚丙稀酰胺水凝胶薄膜厚度分别为5、15、25微米时,湿度响应驱动器在 10 秒内达到最大弯曲角度 630
°
,并且在湿度撤除后10秒内恢复至初始位置(相应时间和恢复时间均为10秒),具有较高灵敏性。此外,当保持胶黏层厚度为15微米、可涂覆聚丙烯酰胺水凝胶厚度为25微米不变,随着pet薄膜厚度从5微米增加到22微米时,本发明三层结构复合薄膜(即湿度响应驱动器)驱动器的最大弯曲角度从630
°ꢀ
减小到297
°
。相应地,随着厚度的增加(5、8、12.5、22微米),驱动时间呈逐渐减小的趋势。特别地,当pet薄膜厚度为22微米,对应三层结构复合薄膜的湿度响应驱动器厚度为62微米时,在相对湿度差为60%的环境下,响应时间、恢复时间分别为6秒和9秒。
24.综上表明:本发明三层结构复合薄膜(即湿度响应驱动器)在相对湿度差为60%的环境下可以发生快速和大变形驱动响应,最大弯曲角度在630
°ꢀ‑
297
°
之间,响应时间、恢复时间均在10秒内,具有良好的可逆响应和驱动性能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。