技术特征:
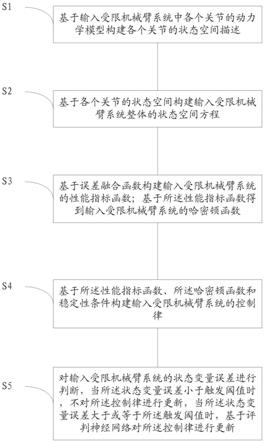
1.一种输入受限机械臂的合作博弈最优跟踪控制方法,其特征在于,包括:基于输入受限机械臂系统中各个关节的动力学模型构建各个关节的状态空间描述;基于各个关节的状态空间构建输入受限机械臂系统整体的状态空间方程;基于误差融合函数构建输入受限机械臂系统的性能指标函数;基于所述性能指标函数得到输入受限机械臂系统的哈密顿函数;基于所述性能指标函数、所述哈密顿函数和稳定性条件构建输入受限机械臂系统的控制律;对输入受限机械臂系统的状态变量误差进行判断,当所述状态变量误差小于触发阈值时,不对所述控制律进行更新,当所述状态变量误差大于或等于所述触发阈值时,基于评判神经网络对所述控制律进行更新。2.根据权利要求1所述的输入受限机械臂的合作博弈最优跟踪控制方法,其特征在于,所述基于输入受限机械臂系统中各个关节的动力学模型构建各个关节的状态空间描述,包括:基于关节力矩反馈技术构建输入受限机械臂系统各个关节的动力学模型;基于定义的各个关节状态变量,结合各个关节的动力学模型,得到各个关节的初始状态空间描述;基于神经网络观测器的观测值对各个关节的初始状态空间描述中的待确定项进行更新;基于更新后的各待确定项,对各个关节的初始状态空间描述进行更新,得到各个关节的状态空间描述。3.根据权利要求1所述的输入受限机械臂的合作博弈最优跟踪控制方法,其特征在于,所述基于误差融合函数构建输入受限机械臂系统的性能指标函数;基于所述性能指标函数得到输入受限机械臂系统的哈密顿函数,包括:基于输入受限机械臂系统的位置误差和速度误差构建所述误差融合函数;基于所述误差融合函数构建输入受限机械臂系统的性能指标函数;基于所述性能指标函数得到输入受限机械臂系统的哈密顿函数。4.根据权利要求1所述的输入受限机械臂的合作博弈最优跟踪控制方法,其特征在于,所述基于所述性能指标函数、所述哈密顿函数和稳定性条件构建输入受限机械臂系统的控制律,包括:基于最优控制原理和李雅普诺夫理论构建输入受限机械臂系统的稳定性条件;基于所述性能指标函数、所述哈密顿函数和所述稳定性条件,构建输入受限机械臂系统的控制律。5.根据权利要求1所述的输入受限机械臂的合作博弈最优跟踪控制方法,其特征在于,所述对输入受限机械臂系统的状态变量误差进行判断,当所述状态变量误差小于触发阈值时,不对所述控制律进行更新,当所述状态变量误差大于或等于所述触发阈值时,基于评判神经网络对所述控制律进行更新,包括:获取输入受限机械臂系统的状态变量误差;基于评判神经网络构建事件触发性能指标函数;基于所述事件触发性能指标函数构建李雅普诺夫函数;
对所述李雅普诺夫函数进行求导,得到所述触发阈值;对所述状态变量误差和所述触发阈值进行判断,当所述状态变量误差小于触发阈值时,不对所述控制律进行更新;当所述状态变量误差大于或等于触发阈值时,基于梯度下降法对所述评判神经网络的权值向量进行更新,并将所述权值向量赋值给所述近似哈密顿函数,得到近似哈密顿函数,基于所述稳定性条件和所述近似哈密顿函数对所述控制律进行更新。6.一种输入受限机械臂的合作博弈最优跟踪控制系统,其特征在于,包括:关节状态空间构建模块,基于输入受限机械臂系统中各个关节的动力学模型构建各个关节的状态空间描述;系统状态空间构建模块,基于各个关节的状态空间构建输入受限机械臂系统整体的状态空间方程;哈密顿函数模块,基于误差融合函数构建输入受限机械臂系统的性能指标函数;基于所述性能指标函数得到输入受限机械臂系统的哈密顿函数;控制律模块,基于所述性能指标函数、所述哈密顿函数和稳定性条件构建输入受限机械臂系统的控制律;判断模块,对输入受限机械臂系统的状态变量误差进行判断,当所述状态变量误差小于触发阈值时,不对所述控制律进行更新,当所述状态变量误差大于或等于所述触发阈值时,基于评判神经网络对所述控制律进行更新。7.根据权利要求6所述的输入受限机械臂的合作博弈最优跟踪控制系统,其特征在于,所述关节状态空间构建模块包括:模型构建单元,基于关节力矩反馈技术构建输入受限机械臂系统各个关节的动力学模型;关节状态空间构建单元,基于定义的各个关节状态变量,结合各个关节的动力学模型,得到各个关节的初始状态空间描述;待确定项更新单元,基于神经网络观测器的观测值对各个关节的初始状态空间描述中的待确定项进行更新;关节状态空间更新单元,基于更新后的各待确定项,对各个关节的初始状态空间描述进行更新,得到各个关节的状态空间描述。8.根据权利要求6所述的输入受限机械臂的合作博弈最优跟踪控制系统,其特征在于,所述哈密顿函数模块包括:误差函数单元,基于输入受限机械臂系统的位置误差和速度误差构建所述误差融合函数;性能指标函数单元,基于所述误差融合函数构建输入受限机械臂系统的性能指标函数;哈密顿函数单元,基于所述性能指标函数得到输入受限机械臂系统的哈密顿函数。9.根据权利要求6所述的输入受限机械臂的合作博弈最优跟踪控制系统,其特征在于,所述控制律模块包括:稳定性单元,基于最优控制原理和李雅普诺夫理论构建输入受限机械臂系统的稳定性条件;
控制律单元,基于所述性能指标函数、所述哈密顿函数和所述稳定性条件,构建输入受限机械臂系统的控制律。10.根据权利要求6所述的输入受限机械臂的合作博弈最优跟踪控制系统,其特征在于,所述判断模块包括:状态变量误差单元,获取输入受限机械臂系统的状态变量误差;事件触发性能函数单元,基于评判神经网络构建事件触发性能指标函数;李雅普诺夫函数单元,基于所述事件触发性能指标函数构建李雅普诺夫函数;触发阈值单元,对所述李雅普诺夫函数进行求导,得到所述触发阈值;判断单元,对所述状态变量误差和所述触发阈值进行判断,当所述状态变量误差小于触发阈值时,不对所述控制律进行更新;当所述状态变量误差大于或等于触发阈值时,基于梯度下降法对所述评判神经网络的权值向量进行更新,并将所述权值向量赋值给所述近似哈密顿函数,得到近似哈密顿函数,基于所述稳定性条件和所述近似哈密顿函数对所述控制律进行更新。
技术总结
本发明涉及一种输入受限机械臂的合作博弈最优跟踪控制方法及系统,首先,基于输入受限机械臂系统中各个关节的动力学模型构建各个关节的状态空间描述;并基于各个关节的状态空间描述构建机械臂系统的状态空间方程;然后基于误差融合函数构建输入受限机械臂系统的性能指标函数;并基于所述性能指标函数得到输入受限机械臂系统的哈密顿函数;其次基于所述性能指标函数、所述哈密顿函数和稳定性条件构建输入受限机械臂系统的控制律;最后基于系统的状态变量误差和触发阈值对所述控制律进行更新。本发明降低了设计过程的复杂性,减少了运行过程中的计算量,不仅使跟踪过程中控制力矩更加连续和平滑,还使机械臂系统的综合能耗达到最优。达到最优。达到最优。
技术研发人员:董博 韦重阳 安天骄 张振国 马冰 姜虎成 李元春
受保护的技术使用者:长春工业大学
技术研发日:2021.12.30
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。