1.本发明涉及机器人控制算法技术领域,特别是涉及一种输入受限机械臂的 合作博弈最优跟踪控制方法及系统。
背景技术:
2.可重构机械臂由一系列具有标准接口的关节模块组成,是一种能够根据需 要任意改变构形的智能化机械臂。与传统构形单一的工业机械臂相比,可重构 机械臂具有高度的灵活性和广泛的适应性,在面对不同的工作环境时可以通过 增加或减少模块重新配置为适应该环境的构形。随着机械臂技术的进步和机械 臂行业的发展,可重构机械臂已经得到越来越多人的认可,现已被广泛应用于 太空探险,深海探测、灾难救援和极端环境作业等很多领域。
3.输入受限是实际工程系统中由于物理条件限制而产生的一种饱和现象。例 如,电机的输出转矩和转速存在最大值,阀门开度有一定的范围限制。这种饱 和现象的发生往往伴随着系统性能的下降,甚至失去稳定性。由于输入受限机 械臂系统的每个模块都包含一个电机,因此研究输入受限机械臂系统具有重要 的意义。
4.为了完成输入受限机械臂系统的轨迹跟踪任务同时降低系统能耗代价,研 究其最优控制方案尤为必要。最优控制是现代控制理论的重要组成部分,其包 括“动态规划”理论和“极大值原理”两个重要的分支。动态规划是求解最优 控制的基本方法,对于线性系统的被控对象,通过求解黎卡提方程获得最优控 制策略,对于可重构机械臂这类复杂的非线性系统,需要求解相应的哈密顿
‑ꢀ
雅可比-贝尔曼方程,但它是一种非线性偏微分方程,很难得到解析解,而自 适应动态规划算法是解决这类非线性系统最优控制问题的有效办法。基于自适 应动态规划算法,我们可以利用评判神经网络近似哈密顿-雅可比-贝尔曼方程 得到其最优跟踪控制策略。但对于输入受限机械臂系统来说,由于我们在设计 控制器时没有考虑关节与关节之间的信息交流,所以上述的最优跟踪控制策略 只是局部最优的。并且,当机械臂系统稳定运行时,如果仍采用周期性的采样 方式将会增加系统的计算负担,造成大量的通信资源浪费。
技术实现要素:
5.有鉴于此,本发明提供了一种输入受限机械臂的合作博弈最优跟踪控制方 法及系统,具体为基于事件触发机制的输入受限可重构机械臂系统合作博弈最 优跟踪控制方法及系统,在保证输入受限机械臂系统轨迹跟踪性能的同时降低 控制器计算负担,并对资源进行了合理的分配。
6.为实现上述目的,本发明提供了如下方案:
7.一种输入受限机械臂的合作博弈最优跟踪控制方法,包括:
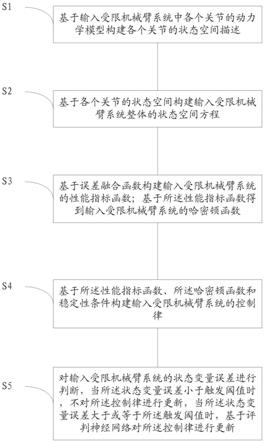
8.基于输入受限机械臂系统中各个关节的动力学模型构建各个关节的状态 空间描述;
9.基于各个关节的状态空间构建输入受限机械臂系统整体的状态空间方程;
10.基于误差融合函数构建输入受限机械臂系统的性能指标函数;基于所述性 能指标函数得到输入受限机械臂系统的哈密顿函数;
11.基于所述性能指标函数、所述哈密顿函数和稳定性条件构建输入受限机械 臂系统的控制律;
12.对输入受限机械臂系统的状态变量误差进行判断,当所述状态变量误差小 于触发阈值时,不对所述控制律进行更新,当所述状态变量误差大于或等于所 述触发阈值时,基于评判神经网络对所述控制律进行更新。
13.优选地,所述基于输入受限机械臂系统中各个关节的动力学模型构建各个 关节的状态空间描述,包括:
14.基于关节力矩反馈技术构建输入受限机械臂系统各个关节的动力学模型;
15.基于定义的各个关节状态变量,结合各个关节的动力学模型,得到各个关 节的初始状态空间描述;
16.基于神经网络观测器的观测值对各个关节的初始状态空间描述中的待确 定项进行更新;
17.基于更新后的各待确定项,对各个关节的初始状态空间描述进行更新,得 到各个关节的状态空间描述。
18.优选地,所述基于误差融合函数构建输入受限机械臂系统的性能指标函 数;基于所述性能指标函数得到输入受限机械臂系统的哈密顿函数,包括:
19.基于输入受限机械臂系统的位置误差和速度误差构建所述误差融合函数;
20.基于所述误差融合函数构建输入受限机械臂系统的性能指标函数;
21.基于所述性能指标函数得到输入受限机械臂系统的哈密顿函数。
22.优选地,所述基于所述性能指标函数、所述哈密顿函数和稳定性条件构建 输入受限机械臂系统的控制律,包括:
23.基于最优控制原理和李雅普诺夫理论构建输入受限机械臂系统的稳定性 条件;
24.基于所述性能指标函数、所述哈密顿函数和所述稳定性条件,构建输入受 限机械臂系统的控制律。
25.优选地,所述对输入受限机械臂系统的状态变量误差进行判断,当所述状 态变量误差小于触发阈值时,不对所述控制律进行更新,当所述状态变量误差 大于或等于所述触发阈值时,基于评判神经网络对所述控制律进行更新,包括:
26.获取输入受限机械臂系统的状态变量误差;
27.基于评判神经网络构建事件触发性能指标函数;
28.基于所述事件触发性能指标函数构建李雅普诺夫函数;
29.对所述李雅普诺夫函数进行求导,得到所述触发阈值;
30.对所述状态变量误差和所述触发阈值进行判断,当所述状态变量误差小于 触发阈值时,不对所述控制律进行更新;当所述状态变量误差大于或等于触发 阈值时,基于梯度下降法对所述评判神经网络的权值向量进行更新,并将所述 权值向量赋值给所述近似哈密顿函数,得到近似哈密顿函数,基于所述稳定性 条件和所述近似哈密顿函数对所述控制律进行更新。
31.本发明还提供了一种输入受限机械臂的合作博弈最优跟踪控制制系统,包 括:
32.关节状态空间构建模块,基于输入受限机械臂系统中各个关节的动力学模 型构建各个关节的状态空间描述;
33.系统状态空间构建模块,基于各个关节的状态空间构建输入受限机械臂系 统整体的状态空间方程;
34.哈密顿函数模块,基于误差融合函数构建输入受限机械臂系统的性能指标 函数;基于所述性能指标函数得到输入受限机械臂系统的哈密顿函数;
35.控制律模块,基于所述性能指标函数、所述哈密顿函数和稳定性条件构建 输入受限机械臂系统的控制律;
36.判断模块,对输入受限机械臂系统的状态变量误差进行判断,当所述状态 变量误差小于触发阈值时,不对所述控制律进行更新,当所述状态变量误差大 于或等于所述触发阈值时,基于评判神经网络对所述控制律进行更新。
37.优选地,所述关节状态空间构建模块包括:
38.模型构建单元,基于关节力矩反馈技术构建输入受限机械臂系统各个关节 的动力学模型;
39.关节状态空间构建单元,基于定义的各个关节状态变量,结合各个关节的 动力学模型,得到各个关节的初始状态空间描述;
40.待确定项更新单元,基于神经网络观测器的观测值对各个关节的初始状态 空间描述中的待确定项进行更新;
41.关节状态空间更新单元,基于更新后的各待确定项,对各个关节的初始状 态空间描述进行更新,得到各个关节的状态空间描述。
42.优选地,所述哈密顿函数模块包括:
43.误差函数单元,基于输入受限机械臂系统的位置误差和速度误差构建所述 误差融合函数;
44.性能指标函数单元,基于所述误差融合函数构建输入受限机械臂系统的性 能指标函数;
45.哈密顿函数单元,基于所述性能指标函数得到输入受限机械臂系统的哈密 顿函数。
46.优选地,所述控制律模块包括:
47.稳定性单元,基于最优控制原理和李雅普诺夫理论构建输入受限机械臂系 统的稳定性条件;
48.控制律单元,基于所述性能指标函数、所述哈密顿函数和所述稳定性条件, 构建输入受限机械臂系统的控制律。
49.优选地,所述判断模块包括:
50.状态变量误差单元,获取输入受限机械臂系统的状态变量误差;
51.事件触发性能函数单元,基于评判神经网络构建事件触发性能指标函数;
52.李雅普诺夫函数单元,基于所述事件触发性能指标函数构建李雅普诺夫函 数;
53.触发阈值单元,对所述李雅普诺夫函数进行求导,得到所述触发阈值;
54.判断单元,对所述状态变量误差和所述触发阈值进行判断,当所述状态变 量误差
小于触发阈值时,不对所述控制律进行更新;当所述状态变量误差大于 或等于触发阈值时,基于梯度下降法对所述评判神经网络的权值向量进行更 新,并将所述权值向量赋值给所述近似哈密顿函数,得到近似哈密顿函数,基 于所述稳定性条件和所述近似哈密顿函数对所述控制律进行更新。
55.根据本发明提供的具体实施例,本发明公开了以下技术效果:
56.本发明涉及一种输入受限机械臂的合作博弈最优跟踪控制方法及系统,首 先,基于输入受限机械臂系统中各个关节的动力学模型构建各个关节的状态空 间描述;并基于各个关节的状态空间描述构建机械臂系统的状态空间方程;然 后基于误差融合函数构建输入受限机械臂系统的性能指标函数;并基于所述性 能指标函数得到输入受限机械臂系统的哈密顿函数;其次基于所述性能指标函 数、所述哈密顿函数和稳定性条件构建输入受限机械臂系统的控制律;最后基 于系统的状态变量误差和触发阈值对所述控制律进行更新。本发明降低了设计 过程的复杂性,减少了运行过程中的计算量,不仅使跟踪过程中控制力矩更加 连续和平滑,还使机械臂系统的综合能耗达到最优。
附图说明
57.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施 例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是 本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性 的前提下,还可以根据这些附图获得其他的附图。
58.图1为本发明输入受限机械臂的合作博弈最优跟踪控制方法流程图;
59.图2为本发明输入受限机械臂的合作博弈最优跟踪控制系统结构图。
60.符号说明:1-关节状态空间构建模块,2-系统状态空间构建模块,3-哈密 顿函数模块,4-控制律模块,5-判断模块。
具体实施方式
61.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清 楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是 全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造 性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
62.本发明的目的是提供一种输入受限机械臂的合作博弈最优跟踪控制方法 及系统,在保证输入受限机械臂系统轨迹跟踪性能的同时降低控制器计算负 担,并对资源进行了合理的分配。
63.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和 具体实施方式对本发明作进一步详细的说明。
64.图1为本发明输入受限机械臂的合作博弈最优跟踪控制方法流程图。如图 所示,本发明提供了一种输入受限机械臂的合作博弈最优跟踪控制方法,所述 方法应用于输入受限机械臂系统,所述方法包括:
65.步骤s1,基于输入受限机械臂系统中各个关节的动力学模型构建各个关 节的状态空间描述。
66.具体地,所述步骤s1包括:
67.步骤s11,基于关节力矩反馈技术构建输入受限机械臂系统中各个关节的 动力学模型。如下式:
[0068][0069]
式中:ui为第i个关节中电机的输出力矩,i=1,2,
…
,n,n为机械臂系统中关 节的总数量,qi为第i个关节的位置,第i个关节的速度,分别为第i个关节 的加速度,i
mi
为第i个关节中电机的转子相对于旋转轴的转动惯量,γi为第i个 关节中减速器的减速比,是第i个关节的摩擦力矩,为第i个关 节及之前的各个关节之间的动态耦合力矩,τ
si
为第i个关节可测量的关节耦合 力矩,di(qi)为第i个关节的扰动力矩,βi为第i个关节中电机的最大输出力矩。
[0070]
其中,
[0071]
式中:f
bi
为第i个关节的粘性摩擦系数,f
si
为第i个关节的静摩擦系数,f
τi
为第i个关节的stribect效应参数,f
ci
为第i个关节的库伦摩擦系数,e为以常 数e为底的指数函数,为第i个关节的摩擦力矩的建模误差。为 符号函数;
[0072][0073]
进一步地,
[0074]
式中:z
mi
为第i个关节中电机转子旋转方向的单位向量,z
lk
为第k个关节 中电机转子旋转方向的单位向量,z
lj
为第j个关节中电机转子旋转方向的单位 向量,t为转置,为第j个关节的加速度,为第j个关节的速度,为第k 个关节的速度。令个关节的速度。令为第i个关节与第j个关节之间的对准算子;令
ꢀꢀ
为第i个关节与第k个关节和第j个关节之间的对准算子; 可以得到:
[0075][0076]
其中,为的估计值,的估计值,为第i个关节与第j个关节之 间的对准误差,为的估计值,的估计值,为第i个关节与第k个关 节和第j个关节之间的对准误差。
[0077]
步骤s12,基于定义的各个关节状态变量,结合各个关节的动力学模型, 得到各个关节的初始状态空间描述。
[0078]
定义第i个关节的状态变量根据各个关节的动力 学模型,得到各个关节的初始状态空间:
[0079][0080]
式中:
·
为求导,x
i1
为第i个关节的位置,x
i2
为第i个关节的速度,gi(xi)为 第i个关节的待确定项,bi为惯性项,是第i个关节的的输入矩阵;
[0081][0082]
代表正实数,代表n维欧几里得空间。
[0083]
步骤s13,基于神经网络观测器的观测值对各个关节的初始状态空间描述 中的待确定项进行更新。
[0084]
将第i个关节的待确定项gi(xi)重构为如下形式:
[0085]gi
(xi)=w
gi
δ
gi
(xi) ε
gi
(xi);
[0086]
其中,为神经网络观测器的理想权值向量,为神经网 络观测器的激活函数,l
gi
为神经网络观测器的神经元数量,ε
gi
(xi)为神经网络 观测器的的近似残差。
[0087]
由于理想权值向量未知,利用神经网络观测器的的估计值替代理想值 w
gi
有:
[0088][0089]
定义第i个关节的状态观测值为根据第i个关节的状态空间将 神经网络观测器设计为:
[0090][0091]
其中,为第i个关节的观测位置,为第i个关节的观测速度,k
io1
和k
io2
为参数变量,定义神经网络观测器误差为e
io1
为 第i个关节的观测位置误差,e
io2
为第i个关节的观测速度误差。
[0092]
对神经网络观测器误差e
io
求导,得到:
[0093][0094]
为了训练神经网络观测器的权值向量和保证设计的神经网络观测器的稳 定性,
选取如下的李雅普诺夫函数l:
[0095][0096]
对李雅普诺夫函数求导有:
[0097][0098]
由上式可知,神经网络观测器的权值向量被调整为:
[0099][0100]
式中:α
gi
为神经网络观测器的学习率,ε
gim
为神经网络观测器近似残差的 上界。当并且时,所设计的神经网络观测器是 稳定的。
[0101]
步骤s14,基于更新后的各待确定项,对各个关节的初始状态空间描述进 行更新,得到各个关节的状态空间描述。
[0102]
步骤s2,基于各个关节的状态空间构建输入受限机械臂系统整体的状态 空间方程。
[0103]
定义输入受限机械臂系统的状态变量得到输入受 限机械臂系统整体的状态空间方程为:
[0104][0105][0106]
其中,表示各个关节的位置,表示各个关节的速度,g(x)表示输入受限机械臂系 统的待确定项,d
ii
为输入受限机械臂系统的惯性项,是输入受限机械臂系统 的输入矩阵。
[0107]
步骤s3,基于误差融合函数构建输入受限机械臂系统的性能指标函数; 基于所述性能指标函数得到输入受限机械臂系统的哈密顿函数。
[0108]
具体地,所述步骤s3包括:
[0109]
步骤s31,基于输入受限机械臂系统的位置误差和速度误差构建所述误差 融合函数。
[0110]
s(x)=x
2-x
2d
αs(x
1-x
1d
);
[0111]
式中:x
1d
表示输入受限机械臂系统的期望位置,x
2d
表示输入受限机械臂 系统的期望速度αs=diag(α
s1
,α
s2
,
…
,α
sn
),是一个正定对角矩阵。
[0112]
步骤s32,基于所述误差融合函数构建输入受限机械臂系统的性能指标函 数。
[0113][0114]
其中,s=s(x),hm表示输入受限机械臂系统受到的内部扰动上界函数,h(x) 满足q是对称正定矩阵。u(ui)是输入受限的正定非二次型函 数:
[0115][0116]
其中,tanh-1
(
·
)为tanh(
·
)的反函数,是一个正定 对角矩阵,dw表示微元算子。
[0117]
对u(ui)积分得到:
[0118][0119]
其中,为一个行向量。
[0120]
步骤s33,基于所述性能指标函数得到输入受限机械臂系统的哈密顿函 数。
[0121][0122][0123]
其中,其中,表示性能指标函数的梯度,θ表示误差融合 函数的余项,表示输入受限机械臂系统的期望加速度。
[0124]
步骤s4,基于所述性能指标函数、所述哈密顿函数和稳定性条件构建输 入受限机械臂系统的控制律。
[0125]
进一步地,所述步骤s4包括:
[0126]
步骤s41,基于最优控制原理和李雅普诺夫理论构建输入受限机械臂系统 的稳定性条件。
[0127]
由最优控制理论可知,合作博弈帕累托最优解即最优轨迹跟 踪控制策略满足下列稳定性条件:
[0128][0129]
步骤s42,基于所述性能指标函数、所述哈密顿函数和所述稳定性条件, 构建输入受限机械臂系统的控制律。
[0130]
步骤s5,对输入受限机械臂系统的状态变量误差进行判断,当所述状态 变量误差小于触发阈值时,不对所述控制律进行更新,当所述状态变量误差大 于或等于所述触发阈
值时,基于评判神经网络对所述控制律进行更新。
[0131]
优选地,所述步骤s5,包括:
[0132]
步骤s51,获取r时刻至r 1时刻系统的状态变量误差。
[0133]er
(t)=s(xr)-s(x),t∈[tr,t
r 1
),r=1,,2,
…
,∞;
[0134][0135]
s(xr)表示采样状态,s(x)表示实际状态。
[0136]
步骤s52,基于评判神经网络构建事件触发性能指标函数。
[0137][0138]
式中:是评判神经网络的理想权值向量,l是评判神经网络的神经 元数量,δc(sr)是评判神经网络的激活函数,εc(sr)是评判神经网络的的近似残 差,其梯度向量为:
[0139][0140]
式中:式中:表示评判神经网络的近似残差εc(sr)的梯度。
[0141]
步骤s53,基于所述事件触发性能指标函数构建李雅普诺夫函数v(t)。
[0142]
v(t)=j
*
(s) j
*
(sr);
[0143]
式中:j
*
(s)表示时间触发下的最优性能指标函数,j
*
(sr)表示事件触发下 的最优性能指标函数。
[0144]
步骤s54,对所述李雅普诺夫函数进行求导,得到所述触发阈值。
[0145][0146]
其中,λ
min
(q)表示以矩阵q最小特征值组成的对角矩阵,k1和k2表示两个 正常数,er(t)为触发阈值。
[0147]
步骤s55,对所述状态变量误差和所述触发阈值进行判断,当所述状态变 量误差小于触发阈值时,不对所述控制律进行更新;当所述状态变量误差大于 或等于触发阈值时,基于梯度下降法对所述评判神经网络的权值向量进行更 新,并将所述权值向量赋值给所述近似哈密顿函数,得到近似哈密顿函数,基 于所述稳定性条件和所述近似哈密顿函数对所述控制律进行更新。
[0148]
基于所述控制律,结合事件触发性能指标函数,得到评判神经网络估计的 事件触发最优轨迹跟踪控制律
[0149][0150]
根据哈密顿函数和事件触发最优轨迹跟踪控制律,哈密顿函数可改写为:
[0151][0152]
其中,e
ch
是由评判神经网络逼近哈密顿函数导致的残差。
[0153]
由于评判神经网络的理想权值未知,用估计值替代理想值wc可以得到为:
[0154][0155]
其梯度向量为:
[0156][0157]
类似的,我们可以得到近似哈密顿函数和事件触发近似最优轨迹跟踪控制 律为:
[0158][0159][0160]
其中,ec表示近似哈密顿函数。
[0161]
为了训练评判神经网络的权值向量,定义目标函数:通过梯度 下降法得到评判神经网络权值向量更新:
[0162][0163]
其中,αc代表神经网络学习率,代表神经网络学习率,表示神经网络权值误差向 量。基于上式对评判神经网络的权值向量的更新,求得事件触发近似最优轨迹 跟踪控制律,以保证输入受限机械臂系统很好的完成轨迹跟踪任务。
[0164]
图2为本发明输入受限机械臂的合作博弈最优跟踪控制系统结构图。如图 所示,本发明提供了一种输入受限机械臂的合作博弈最优跟踪控制系统,包括: 关节状态空间构建模块1、系统状态空间构建模块2、哈密顿函数模块3、控 制律模块4和判断模块5。
[0165]
所述关节状态空间构建模块1基于输入受限机械臂系统中各个关节的动 力学模型构建各个关节的状态空间描述。
[0166]
所述系统状态空间构建模块2基于各个关节的状态空间构建输入受限机 械臂系统整体的状态空间方程。
[0167]
所述哈密顿函数模块3基于误差融合函数构建输入受限机械臂系统的性 能指标函数;基于所述性能指标函数得到输入受限机械臂系统的哈密顿函数。
[0168]
所述控制律模块4基于所述性能指标函数、所述哈密顿函数和稳定性条件 构建输入受限机械臂系统的控制律。
[0169]
所述判断模块5对输入受限机械臂系统的状态变量误差进行判断,当所述 状态变量误差小于触发阈值时,不对所述控制律进行更新,当所述状态变量误 差大于或等于所述触发阈值时,基于评判神经网络对所述控制律进行更新。
[0170]
作为一种可选的实施方式,本发明所述关节状态空间构建模块1包括:模 型构建单元、关节状态空间构建单元、待确定项更新单元和关节状态空间更新 单元。
[0171]
所述模型构建单元基于关节力矩反馈技术构建输入受限机械臂系统各个 关节的动力学模型。
[0172]
所述关节状态空间构建单元基于定义的各个关节状态变量,结合各个关节 的动力学模型,得到各个关节的初始状态空间描述。
[0173]
所述待确定项更新单元基于神经网络观测器的观测值对各个关节的初始 状态空间描述中的待确定项进行更新。
[0174]
所述关节状态空间更新单元基于更新后的各待确定项,对各个关节的初始 状态空间描述进行更新,得到各个关节的状态空间描述。
[0175]
作为一种可选的实施方式,本发明所述哈密顿函数模块3包括:误差函数 单元、性能指标函数单元和哈密顿函数单元。
[0176]
所述误差函数单元基于输入受限机械臂系统的位置误差和速度误差构建 所述误差融合函数。
[0177]
所述性能指标函数单元基于所述误差融合函数构建输入受限机械臂系统 的性能指标函数。
[0178]
所述哈密顿函数单元基于所述性能指标函数得到输入受限机械臂系统的 哈密顿函数。
[0179]
作为一种可选的实施方式,本发明所述控制律模块4包括:稳定性单元和 控制律单元。
[0180]
所述稳定性单元基于最优控制原理和李雅普诺夫理论构建输入受限机械 臂系统的稳定性条件。
[0181]
所述控制律单元基于所述性能指标函数、所述哈密顿函数和所述稳定性条 件,构建输入受限机械臂系统的控制律。
[0182]
作为一种可选的实施方式,本发明所述判断模块5包括:状态变量误差单 元、事件触发性能函数单元、李雅普诺夫函数单元、触发阈值单元和判断单元。
[0183]
所述状态变量误差单元获取输入受限机械臂系统的状态变量误差。
[0184]
所述事件触发性能函数单元基于评判神经网络构建事件触发性能指标函 数。
[0185]
所述李雅普诺夫函数单元基于所述事件触发性能指标函数构建李雅普诺 夫函数。
[0186]
所述触发阈值单元对所述李雅普诺夫函数进行求导,得到所述触发阈值。
[0187]
所述判断单元对所述状态变量误差和所述触发阈值进行判断,当所述状态 变量误差小于触发阈值时,不对所述控制律进行更新;当所述状态变量误差大 于或等于触发阈值时,基于梯度下降法对所述评判神经网络的权值向量进行更 新,并将所述权值向量赋值给所述近似哈密顿函数,得到近似哈密顿函数,基 于所述稳定性条件和所述近似哈密顿函数对所述控制律进行更新。。
[0188]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是 与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于 实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较 简单,相关之处参见方法部
分说明即可。
[0189]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施 例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的 一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变 之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。