技术特征:
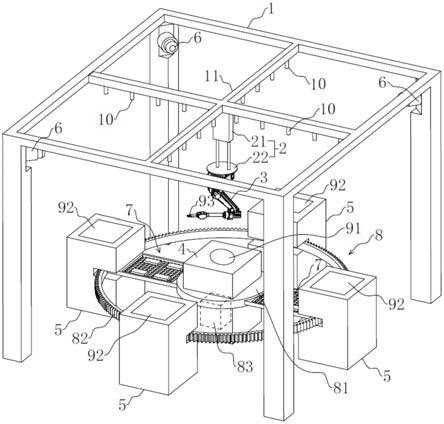
1.一种用于精密齿轮转移的全自动智能机械手抓取系统,其特征在于:包括机架(1)、升降装置(2)、智能机械手(3)、中心工作台(4)、周边工作台(5)、摄像头组、承接防护装置(7)、切换驱动装置(8)、齿轮掉落检测装置和控制模块;所述机架(1)为长方体框架式结构,所述升降装置(2)安装于所述机架(1)顶部的中间位置处,所述智能机械手(3)安装于所述升降装置(2)的活动端上,所述升降装置(2)用于驱使所述智能机械手(3)自由升降,所述中心工作台(4)位于所述升降装置(2)的正下方,所述周边工作台(5)设置有多个且环绕所述中心工作台(4)间隔布置,所述中心工作台(4)和每一个所述周边工作台(5)之间都形成有一条齿轮转移路径,所述智能机械手(3)用于夹取精密齿轮并在多条所述齿轮转移路径上转移精密齿轮;所述摄像头组安装于所述机架(1)的顶部且用于拍摄所述精密齿轮的位置图像信息,所述控制模块根据获取到的位置图像信息控制所述智能机械手(3)按照预设的程序在不同的齿轮转移路径上转移精密齿轮;所述齿轮掉落检测装置设置于所述智能机械手(3)、所述周边工作台(5)和所述中心工作台(4)上,所述齿轮掉落检测装置用于实时检测所述智能机械手(3)上夹取的精密齿轮是否非正常掉落;所述承接防护装置(7)至少设置有一组且正常状态下位于部分所述齿轮转移路径的下方,所述切换驱动装置(8)设置于所述中心工作台(4)和所述周边工作台(5)之间,当所述齿轮掉落检测装置检测到精密齿轮从所述智能机械手(3)上非正常掉落时,所述控制模块控制所述切换驱动装置(8)动作以带动所述承接防护装置(7)运动至相应的齿轮转移路径下方并承接保护掉落的精密齿轮。2.根据权利要求1所述的用于精密齿轮转移的全自动智能机械手抓取系统,其特征在于:所述承接防护装置(7)包括固定框(71)和防护网(72),所述防护网(72)安装于所述固定框(71)内,所述防护网(72)为弹性绳网,所述固定框(71)的宽度与所述中心工作台(4)/所述周边工作台(5)宽度的宽度相一致。3.根据权利要求2所述的用于精密齿轮转移的全自动智能机械手抓取系统,其特征在于:所述承接防护装置(7)还包括安全气囊(73),所述防护网(72)和所述固定框(71)之间形成凹陷安装槽,所述安全气囊(73)固定安装于所述凹陷安装槽,所述安全气囊(73)受控于所述控制模块的指令而启动充气。4.根据权利要求1所述的用于精密齿轮转移的全自动智能机械手抓取系统,其特征在于:所述切换驱动装置(8)包括驱动盘(81)、转动环(82)和切换伺服电机(83),所述驱动盘(81)和所述转动环(82)均水平布置且在同一水平面上,所述驱动盘(81)转动安装于所述中心工作台(4)上,所述切换伺服电机(83)安装于所述中心工作台(4)内且其输出轴带动所述驱动盘(81)转动,所述承接防护装置(7)安装于所述转动环(82)的内侧壁和所述驱动盘(81)的外侧壁之间,所述周边工作台(5)朝向所述中心工作台(4)的一侧设置有与所述转动环(82)相适配的转动槽(51),所述转动环(82)在多个所述转动槽(51)之间自由转动。5.根据权利要求4所述的用于精密齿轮转移的全自动智能机械手抓取系统,其特征在于:所述转动环(82)的外侧壁设置有一圈外齿,所述周边工作台(5)内设置有辅助驱动齿轮(84)和辅助伺服电机(85),所述辅助驱动齿轮(84)转动安装于所述转动槽(51)内且其转动轴线竖向布置,所述辅助伺服电机(85)的输出轴连接于所述辅助驱动齿轮(84)并驱使其转
动,所述辅助驱动齿轮(84)和所述转动环(82)的外齿相啮合。6.根据权利要求4所述的用于精密齿轮转移的全自动智能机械手抓取系统,其特征在于:所述转动槽(51)的槽底设置有一排呈弧形布置且自由滚动的滚珠(52),所述滚珠(52)抵接于所述转动环(82)的下表面。7.根据权利要求1所述的用于精密齿轮转移的全自动智能机械手抓取系统,其特征在于:所述齿轮掉落检测装置包括第一重力传感器(91)、第二重力传感器(92)和压力传感器(93),所述智能机械手(3)上设置有用于夹取精密齿轮的气动夹指,所述压力传感器(93)安装于所述气动夹指的夹板内侧,所述第一重力传感器(91)安装于所述中心工作台(4)的上表面,所述第二重力传感器(92)安装于所述周边工作台(5)的上表面。8.根据权利要求1所述的用于精密齿轮转移的全自动智能机械手抓取系统,其特征在于:所述摄像头组设置有四个摄像头(6),四个所述摄像头(6)分别安装于所述机架(1)的顶部四角处。9.根据权利要求1所述的用于精密齿轮转移的全自动智能机械手抓取系统,其特征在于:所述升降装置(2)包括升降气缸(21)和安装板(22),所述升降气缸(21)的主体安装于所述机架(1)的顶部中间位置处,所述升降气缸(21)的伸缩杆朝下布置,所述安装板(22)的上表面固定安装于所述升降气缸(21)的伸缩杆底部,所述智能机械手(3)安装于所述安装板(22)的下表面。10.根据权利要求1所述的用于精密齿轮转移的全自动智能机械手抓取系统,其特征在于:所述机架(1)由方钢管制作而成,所述机架(1)的顶部设置有十字安装架(11),所述十字安装架(11)的下表面设置有补光led灯(10)。
技术总结
本申请涉及一种用于精密齿轮转移的全自动智能机械手抓取系统,包括机架、升降装置、智能机械手、中心工作台、周边工作台、摄像头组、承接防护装置、切换驱动装置、齿轮掉落检测装置和控制模块,当所述齿轮掉落检测装置检测到精密齿轮从所述智能机械手上非正常掉落时,所述控制模块控制所述切换驱动装置动作以带动所述承接防护装置运动至相应的齿轮转移路径下方并承接保护掉落的精密齿轮。本申请具有以下可预期的技术效果:即使智能机械手上抓取的精密齿轮,因意外而掉落,该系统也可以及时反映然后驱使承接防护装置运动至相应的齿轮转移路径下方,且及时承接保护掉落精密齿轮,避免造成齿轮报废的重大损失。免造成齿轮报废的重大损失。免造成齿轮报废的重大损失。
技术研发人员:李元杰 龚鹏程
受保护的技术使用者:襄阳奇竞特机电制造有限责任公司
技术研发日:2021.12.28
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。