1.本发明涉及隧道衬砌空洞检测技术领域,具体涉及一种隧道衬砌空洞敲击机构及自动敲击检测装置。
背景技术:
2.近些年,我国的铁路、公路建设里程不断增长。而隧道是修建在地下或山体中供车辆行驶的通道,能够有效缩短两地之间行车距离,提高运输效率。衬砌作为隧道的主体结构,起到承受地层压力、防止围岩变形的作用。在建设衬砌时,由于施工工艺不当、施工人员操作不规范、开挖塌方处置不合理等因素影响,导致一部分区段衬砌存在空洞的施工缺陷。
3.如果这些空洞不能得到及时处置,而后经过运营期荷载作用及自然环境影响,空洞容易引发衬砌渗漏水、开裂、掉块等情况,降低隧道结构的安全性及稳定性,给行车安全造成严重威胁。
4.为了保证隧道中通行车辆的安全,对衬砌中的空洞进行及时、准确、快速检测具有重要意义。目前检测空洞的方法主要为地质雷达法和人工敲击回声法。地质雷达法容易受钢筋、水、汽等因素影响,不能够实现实时有效识别。而人工敲击回声法是通过人工敲击衬砌表面,人耳听音判断是否存在空洞,自动化水平低、检测结果易受人为因素影响、准确性差,劳动强度大。
技术实现要素:
5.本发明提供了一种隧道衬砌空洞敲击机构及自动敲击检测装置及其控制方法,以解决人工敲击回声法自动化水平低、劳动强度大的技术问题。
6.本发明的一种隧道衬砌空洞敲击机构,包括第一固定板、敲击锤、蓄能弹簧、凸轮和驱动电机,敲击锤与蓄能弹簧构成可伸缩组件,此可伸缩组件连接在第一固定板上,驱动电机固接在第一固定板上,凸轮设置在驱动电机的第一输出轴上,凸轮的凸轮面抵靠在可伸缩组件上。
7.本发明的一种隧道衬砌空洞自动敲击检测装置,包括:如上述所述的隧道衬砌空洞敲击机构;升降机构,一端与隧道衬砌空洞敲击机构连接;旋转机构,其具有与移动工具连接的安装件;旋转机构一端与升降机构的另一端连接;空洞检测处理模块,设置在隧道衬砌空洞敲击机构或升降机构或旋转机构上。
8.本发明提供的一种隧道衬砌空洞敲击机构及自动敲击检测装置,可以实现以下技术效果:
9.通过隧道衬砌空洞敲击机构对隧道中的衬砌进行自动化敲击,将人工敲击转变成机械化自动敲击,提高了自动化水平,降低了检测人员的劳动强度,便于检测人员对衬砌中的空洞进行及时、准确、快速检测,保障了隧道中通行车辆的安全。
10.以上的总体描述和下文中的描述仅是示例性和解释性的,不用于限制本发明。
附图说明
11.一个或一个以上实施例通过与之对应的附图进行示例性说明,这些示例性说明和附图并不构成对实施例的限定,附图中具有相同参考数字标号的元件视为类似的元件,并且其中:
12.图1是本发明实施例提供的一种隧道衬砌空洞敲击机构的结构示意图;
13.图2是本发明实施例提供的一种隧道衬砌空洞敲击机构的爆炸结构示意图;
14.图3是本发明实施例提供的一种导向组件的结构示意图;
15.图4是本发明实施例提供的一种隧道衬砌空洞敲击机构的示意图一;
16.图5是本发明实施例提供的一种隧道衬砌空洞敲击机构的示意图二;
17.图6是本发明实施例提供的一种信息处理模块的示意图;
18.图7是本发明实施例提供的一种标识模块的结构示意图;
19.图8是本发明实施例提供的一种信息处理模块的结构示意图;
20.图9是本发明实施例提供的一种旋转机构的结构示意图;
21.图10是本发明实施例提供的一种旋转机构的爆炸结构示意图;
22.图11是本发明实施例提供的一种升降机构的结构示意图;
23.图12是图11的a部放大图;
24.图13是本发明实施例提供的一种隧道衬砌空洞自动敲击检测装置的示意图一;
25.图14是本发明实施例提供的一种隧道衬砌空洞自动敲击检测装置的示意图二。
26.附图标记:
27.1、隧道衬砌空洞敲击机构;11、第一固定板;111、第一侧面;112、第二侧面;113、支撑板;115、固定孔;12、敲击锤;121、锤头;122、第二固定板;123、活动杆;124、第一凸起;125、第二凸起;126、第一安装腔;127、连接块;13、蓄能弹簧;14、凸轮;15、驱动电机;151、第一输出轴;21、通孔;22、连接螺栓;23、轴承座;24、平键块;25、平键槽;26、防护罩壳;261、开口;3、导向组件;31、导向杆;311、限位凸起;32、导向架;33、导向轮;34、导向孔;4、减震台;41、连接杆;411、第三凸起;42、减震弹簧;43、减震板;5、信息处理模块;51、电路板;52、处理器;53、传声器;54、测距传感器;55、信息储存器;56、安装罩壳;57、电池;6、标识模块;61、警报器;611、套管;612、支撑杆;613、警报灯;62、标记组件;621、第一卡箍;622、第二卡箍;623、电动喷壶;7、旋转机构;71、安装件;72、第二安装腔;73、转轴;74、旋转齿轮;75、传动齿轮;76、旋转电机;761、第二输出轴;8、升降机构;81、升降架;82、安装板;83、升降电机;831、第三输出轴;84、丝杆;85、导轨;86、滑块;87、限位块;91、移动工具。
具体实施方式
28.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明,应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
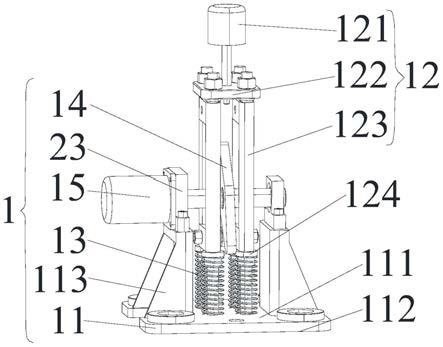
29.如图1、图2所示,本公开实施例提供一种隧道衬砌空洞敲击机构1,包括第一固定板11、敲击锤12、蓄能弹簧13、凸轮14及驱动电机15。第一固定板11的一侧面为第一侧面111,与第一侧面111相对的另一侧面为第二侧面112。第一侧面111上构造有两个支撑板113,两个支撑板113对称设置。敲击锤12与蓄能弹簧13构成可伸缩组件。
30.敲击锤12包括锤头121、第二固定板122、活动杆123。锤头121用于敲击隧道衬砌的表面,锤头121的一端固定连接于第二固定板122的一侧面。当锤头121位于第二固定板122的中心位置时,锤头121锤击衬砌时的受力更加均匀,敲击效果好。活动杆123的上端固定连接于第二固定板122。活动杆123的中下部靠近第一侧面111的位置构造有第一凸起124,之后将蓄能弹簧13套设在活动杆123的另一端,活动杆123的另一端贯穿第一固定板11至第二侧面112。此时,蓄能弹簧13的一端抵触于活动杆123中下部位置的第一凸起124,另一端抵触于第一侧面111。在活动杆123的另一端的端部设置有第二凸起125,由于蓄能弹簧13的张力,第二凸起125抵触于第二侧面112,此时第二凸起125起限位作用。活动杆123设置有第二凸起125的一端视为敲击锤12的连接端。第二固定板122上设置有两组活动杆123,这两组活动杆123对称设置,两组活动杆123之间形成的空间视为敲击锤12的第一安装腔126。每组活动杆123均包含两根活动杆123。在一组活动杆123中,两根活动杆123之间设置有连接块127,连接块127能够加强两根活动杆123的连接结构,连接块127上构造有通孔。用连接螺栓22分别穿过两组活动杆123的连接块127上的通孔,能够加强两组活动杆123的整体性。该连接螺栓22视为第一安装腔126的腔底。
31.驱动电机15包括第一输出轴151。在第一固定板11的两个支撑板113的端部均设置有轴承座23。凸轮14的中心位置构造有通孔21,凸轮14设置于第一安装腔126内。第一输出轴151穿过一支撑板113的轴承座23进入第一安装腔126内,穿过凸轮14的通孔21,最后进入另一支撑板113的轴承座23内。第一输出轴151上焊接有平键块24,凸轮14的通孔21内构造有与平键块24相适配的平键槽25,通过将平键块24设置于平键槽25内的方式,实现了第一输出轴151与凸轮14通过平键连接。
32.其中,当驱动电机15工作时,第一输出轴151转动驱动凸轮14转动,凸轮14的凸轮面刚抵触连接螺栓22的位置可以视为第一位置,或凸轮14的凸轮面抵触连接螺栓22的位置均可以视为第一位置。凸轮14的凸轮面不接触连接螺栓22的位置均可以视为第二位置。凸轮14的凸轮面随着凸轮14转动挤压连接螺栓22,连接螺栓22向第一侧面111移动,锤头121向第一固定板11移动,第一凸起124挤压蓄能弹簧13,蓄能弹簧13压缩蓄力。凸轮14的凸轮面随着凸轮14转动到第二位置,凸轮14的凸轮面不与连接螺栓22抵触,蓄能弹簧13由于自身张力复位,锤头121向远离第一固定板11的方向移动。
33.通过隧道衬砌空洞敲击机构对隧道中的衬砌进行自动化敲击,将人工敲击转变成机械化自动敲击,提高了自动化水平,降低了检测人员的劳动强度,便于检测人员对衬砌中的空洞进行及时、准确、快速检测,保障了隧道中通行车辆的安全。
34.如图3、图4所示,隧道衬砌空洞敲击机构1还包括为敲击锤12导向的导向组件3。导向组件3包括导向杆31、导向架32及导向轮33。导向杆31的一端构造有限位凸起311,该端贯穿第一固定板11至第二侧面112,此时限位凸起311抵触第一侧面111,通过螺母与导向杆31末端的螺纹配合将导向杆31与第一固定板11固定连接。导向杆31的另一端固定连接有导向架32,导向架32上设置有多个导向轮33,导向轮33通过螺栓可拆卸地连接于导向架32。导向轮33可以采用v型轮。导向架32上相邻的两个导向轮33的v型槽之间形成的空间视为导向孔34。导向孔34可以供锤头121通过。通过在隧道衬砌空洞敲击机构1上设置导向组件3,并通过导向组件3对敲击锤12的敲击方向进行导向,能够使敲击锤12在敲击衬砌表面时更加精准,避免敲击锤12的敲击方向发生偏差。
35.如图4、图5所示,隧道衬砌空洞敲击机构1还包括防护罩壳26。防护罩壳26罩设于敲击锤12、蓄能弹簧13、凸轮14、第一固定板11、驱动电机15及导向组件3之外。用螺钉将防护罩壳26固定于第一固定板11上。防护罩壳26上一体成型有一长条状的开口261,敲击锤12的锤头121和导向组件3的导向轮33穿过开口261暴露于防护罩壳26外。敲击锤12在敲击衬砌时容易产生大量粉尘,粉尘散落到敲击锤12及敲击机构的其他结构上会影响敲击机构的正常工作,在隧道衬砌空洞敲击机构1上设置防护罩壳26,能够降低粉尘进入敲击机构内的风险。在敲击锤12对衬砌进行敲击时,锤头121会将防护罩壳26内的空气从开口261带到防护罩壳26外,从而产生气流,避免粉尘从开口261进入防护罩壳26内。
36.如图3至图5所示,隧道衬砌空洞敲击机构1还包括减震台4。减震台4包括连接杆41、减震弹簧42、减震板43。连接杆41的一端构造有圆柱状的第三凸起411,第一固定板11上构造有固定孔115,固定孔115的内径与圆柱状的连接杆41外径相同。连接杆41的一端穿过固定孔115,第三凸起411与第一固定板11抵触,此处连接杆41设置有第三凸起411的一端与第一固定板11的连接方式可以采用焊接或螺栓固定。减震弹簧42套设于连接杆41的另一端,连接杆41的另一端从减震板43的一侧面贯穿至减震板43的另一侧面,此处连接杆41的另一端与减震板43的连接方式可以采用焊接或螺栓固定。当连接杆41与减震板43固定连接时,减震弹簧42的一端抵触于第三凸起411,另一端抵触于减震板43的一侧面。例如,连接杆41的另一端构造有螺纹,当连接杆41设置有螺纹的一端贯穿减震板43时,采用螺母将连接杆41与减震板43连接。敲击锤12在敲击衬砌时,会产生反作用力,通过在隧道衬砌空洞敲击机构1上设置减震台4,能够为敲击锤12提供柔性缓冲,减少反作用力对隧道衬砌空洞敲击机构1的损伤。
37.如图6至图14所示,本公开实施例提供一种隧道衬砌空洞自动敲击检测装置,该隧道衬砌空洞自动敲击检测装置包括如上述实施例中的隧道衬砌空洞敲击机构1、升降机构8、旋转机构7及空洞检测处理模块。升降机构8的一端与隧道衬砌空洞敲击机构1固定连接。旋转机构7包括与移动工具91连接的安装件71。旋转机构的一端与升降机构8的另一端转动连接。空洞检测处理模块设置在隧道衬砌空洞敲击机构1或升降机构8或旋转机构7上。隧道衬砌空洞自动敲击检测装置能够通过升降机构8调整敲击锤12到衬砌表面的距离,同时还能够通过旋转机构7驱动升降机构8转动,使敲击锤12灵活地敲击衬砌。
38.可选地,移动工具91可以采用轨道车或工程车或火车。移动工具91用于带动隧道衬砌空洞自动敲击检测装置移动。
39.如图6至图8所示,空洞检测处理模块包括信息处理模块5。信息处理模块5设置在第一固定板11;或,信息处理模块5设置在减震台4;或,信息处理模块5设置在隧道衬砌空洞自动敲击检测装置的升降机构8上,信息处理模块5设置在升降机构8的导轨85上。
40.该信息处理模块5包括电路板51、处理器52、传声器53、测距传感器54及信息储存器55。处理器52、传声器53、测距传感器54及信息储存器55均设置在电路板51上。处理器52用于处理并分析传声器53收集到的回声数据,例如,处理器52可以采用树莓派研发生产的型号为bcm2836处理器52。传声器53与处理器52电连接。传声器53的采集端朝向敲击锤12的锤头121或敲击锤12的连接端。传声器53用于收集敲击锤12敲击衬砌时产生的回声数据,并将回声数据传输给处理器52。例如,传声器53可以采用北京声望声电研发生产的型号为om242型号的传声器53。测距传感器54与处理器52电连接。测距传感器54的轴线与锤头121
的轴线平行,这样地设置能够使测距传感器54更加精准的检测锤头121到衬砌的距离。例如,测距传感器54可以采用松下研发生产的型号为ex-l291的激光测距传感器54。信息储存器55与处理器52电连接。当处理器52处理并分析传声器53采集到的回声数据,处理器52会将该回声数据发送给信息储存器55,信息储存器55用于储存处理以后的回声数据。例如,信息储存器55可以采用存储tf卡。在处理器52上设置信息储存器55,便于后期检测人员调取回声数据。信息处理模块5还包括安装罩壳56,安装罩壳56罩设在电路板51上,并通过螺钉将安装罩壳56固定于减震板43上,安装罩壳56对电路板51上的零件起保护作用。安装罩壳56上构造有通孔21,传声器53的采集端穿过安装罩壳56上的通孔21暴露于安装罩壳56外,便于采集敲击锤12产生的回声。电路板51上还设置有电池57,电池57与电路板电连接,电池57用于为电路板上的其他元件供电。
41.如图6、图7所示,空洞检测处理模块还包括标识模块6。标识模块6包括警报器61、标记组件62。警报器61及标记组件62均可以设置在第一固定板11上;或,警报器61及标记组件62均可以设置在减震台4上;或,警报器61及标记组件62均可以设置在隧道衬砌空洞自动敲击检测装置的升降机构8上,警报器61及标记组件62均可以设置在升降机构8的导轨85上。警报器61与处理器52电连接,标记组件62与处理器52电连接。
42.具体地,警报器61包括套管611、支撑杆612和警报灯613。套管611焊接于第一固定板11的第二侧面112上。支撑杆612的形状呈l型。支撑杆612的一端插入套管611内,并通过螺钉或螺栓将支撑杆612固定于套管611上。支撑杆612的另一端上粘接有警报灯613,警报灯613与处理器52电连接。
43.具体地,标记组件62包括第一卡箍621、第二卡箍622及电动喷壶623。第一卡箍621固定在支撑杆612上靠近警报灯613的一端。第二卡箍622焊接于第一卡箍621,且第二卡箍622的中心轴线垂直与第一卡箍621的中心轴线。第二卡箍622用于固定电动喷壶623的水壶。电动喷壶623的喷嘴朝向锤头121锤击衬砌的位置。例如,电动喷壶623可以采用芊阙生产的电动喷壶623。
44.通过在隧道衬砌空洞敲击机构1上设置标识模块6,警报灯613通过声音提醒检测人员找到了空洞,并通过灯光提醒检测人员目前空洞敲击机构在隧道内的位置。同时,通过标记组件62对空洞位置进行喷涂色彩进行标记,便于后期维修人员对于空洞进行处理。
45.如图9、图10所示,旋转机构7包括安装件71、第二安装腔72、转轴73、旋转齿轮74、传动齿轮75及旋转电机76。安装件71可以采用箱体结构或架子结构。安装件71内一体成型有第二安装腔72,用螺栓或螺钉贯穿第二安装腔72的腔底将安装件71固定在移动工具91上。转轴73可以转动地设置在第二安装腔72的腔口处,或转轴73可以转动地设置在第二安装腔72内。
46.可选地,在第二安装腔72的腔口处设置两个轴承座23,两个轴承座23对称设置在第二安装腔72相对的两个侧壁上。用螺钉将轴承座23固定在第二安装腔72相对的两个侧壁上。转轴73的一端固定于一轴承座23内,转轴73的另一端固定于另一轴承座23内。旋转齿轮74为半圆形齿轮,旋转齿轮74与转轴73同轴心设置,且旋转齿轮74位于第二安装腔72内。转轴73上设置有平键块24,转轴73上构造有与平键块24相适配的平键槽25,旋转齿轮74的通孔21内同样构造有与平键块24相适配的平键槽25。先将平键块24的一部分放入转轴73的平键槽25内,之后将转轴73插入旋转齿轮74的通孔21内,并使得平键块24的另一部分位于旋
转齿轮74的平键槽25内,通过这样的设置实现了转轴73与旋转齿轮74的可拆卸安装。用螺栓将旋转电机76固定于第二安装腔72的腔底。旋转电机76的第二输出轴761上设置有平键块24。第二输出轴761上构造有与平键块24相适配的平键槽25,传动齿轮75的通孔21内同样构造有与平键块24相适配的平键槽25。先将平键块24的一部分放入第二输出轴761的平键槽25内,之后将第二输出轴761插入传动齿轮75的通孔21内,并使得平键块24的另一部分位于传动齿轮75的平键槽25内,通过这样的设置实现了第二输出轴761与传动齿轮75的可拆卸安装。当传动齿轮75安装在第二输出轴761上时,传动齿轮75与旋转齿轮74啮合。旋转电机76的第二输出轴761转动,传动齿轮75随第二输出轴761转动,传动齿轮75带动旋转齿轮74转动,旋转齿轮74带动转轴73转动,由于升降机构8设置在转轴73上,所以升降机构8能够随转轴73转动。检测人员可以通过旋转机构7驱动升降机构8转动,能够使敲击锤12的敲击角度更加灵活。
47.如图11、图12所示,升降机构8包括升降架81、安装板82、升降电机83、丝杆84、导轨85及滑块86。升降架81的一端固定连接于旋转机构7的转轴73上,升降架81可以随转轴73转动。安装板82设置于升降架81的中部位置,或安装板82焊接于升降架81靠近转轴73的一端。用螺钉或螺栓将升降电机83安装固定于安装板82上。升降电机83设置在安装板82朝向转轴73的一侧面,升降电机83的第三输出轴831贯穿安装板82至安装板82朝向敲击锤12的一侧面。丝杆84的一端焊接于升降电机83的第三输出轴831,或采用螺栓固定连接的方式将丝杆84的一端与第三输出轴831连接。导轨85焊接于升降架81上,或导轨85焊接于安装板82上。滑块86滑动连接于导轨85上。滑块86上构造有t型槽或燕尾槽,导轨85的形状与滑块86的t型槽或燕尾槽相适配,这样的设置能够使滑块86沿着导轨85滑动,同时滑块86的t型槽或燕尾槽能够防止滑块86从导轨85上滑脱。滑块86设置在丝杆84上,丝杆84能够驱动滑块86移动。丝杆84远离第三输出轴831的一端设置有一个限位块87,限位块87焊接于丝杆84的一端,或用螺钉将限位块87固定安装于丝杆84的一端。升降电机83的第三输出轴831转动,丝杆84随着第三输出轴831转动,丝杆84转动驱动滑块86沿导轨85上、下移动。在检测人员驱动旋转机构7对敲击锤12进行角度调整后,敲击锤12的锤头121到衬砌的表面距离增加,检测人员可以通过驱动升降机构8对敲击锤12进行升降,以保障敲击锤12在角度调整后仍能够敲击衬砌表面。
48.如图13、图14所示,检测人员将隧道衬砌空洞自动敲击检测装置安装固定于移动工具91上,隧道衬砌空洞自动敲击检测装置随移动工具91移动。在移动工具91进入隧道内,检测人员控制旋转结构7驱动升降机构8围绕转轴73转动,便于检测人员灵活调整敲击锤的敲击角度。之后检测人员控制升降机构8进行升降,调整敲击锤到衬砌的距离。
49.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。