1.本发明涉及跨骑型车辆的转向辅助装置。
2.本技术基于在2019年9月30日提出申请的日本国特愿2019-179031号而主张优先权,并将其内容援引于此。
背景技术:
3.在专利文献1中公开如下内容:在对乘用车的停车进行支援的控制装置中,在驾驶员进行的转向操作的方向与避免和障碍物接触的回避方向为同方向的情况、以及与所述回避方向为反方向的情况下,使转向致动器产生的转向转矩的方向或大小不同。由此,能够通过转向致动器产生的转向转矩对与障碍物的接触回避进行支援,并且能够不被致动器产生的转向转矩干扰地进行遵照驾驶员的意图的转向操作。
4.在先技术文献
5.专利文献
6.专利文献1:日本国特开2008-55985号公报
技术实现要素:
7.发明的概要
8.发明要解决的课题
9.然而,上述现有技术中没有公开跨骑型车辆的驾驶支援系统的工作时的适当的辅助转向。希望例如追尾减轻制动、车道脱离警告、盲点监测这样的系统的工作时的适当的控制。
10.本发明的方案在使车身侧倾而使转向轮产生转向角的跨骑型车辆的转向辅助装置中,实现驾驶支援系统的工作时的适当的辅助转向控制。
11.用于解决课题的方案
12.(1)本发明的一方案的跨骑型车辆的转向辅助装置为使车身向侧倾方向摆动而使转向轮产生转向角的跨骑型车辆的转向辅助装置,其具备:转向致动器,其向支承所述转向轮的悬架装置施加辅助转矩;控制机构,其对所述转向致动器进行驱动控制;以及外部探测机构,其探测车辆周围的状况,其中,在所述外部探测机构在本车的左右任一侧探测到障碍物的情况下,所述控制机构以使向探测到所述障碍物一侧的相反侧的手把操作比未探测到所述障碍物的情况加重的方式控制所述辅助转矩。
13.(2)在上述(1)的方案中,也可以是,在本车的左右任一侧探测到障碍物且探测到本车向探测到所述障碍物一侧的前进道路变更预测动作的情况下,所述控制机构以使向探测到所述障碍物一侧的相反侧的手把操作加重的方式控制所述辅助转矩。
14.(3)在上述(1)或(2)的方案中,也可以是,在探测到在与本车相同的车道内位于本车后方的其他车点亮左右任一侧的方向指示灯的情况时,所述控制机构在所述方向指示灯点亮一侧预测而探测到障碍物的存在。
15.【发明效果】
16.根据上述(1)的方案,通过驾驶支援系统探测本车的左右的障碍物,且基于该障碍物探测信息,使向探测到障碍物一侧的相反侧的手把操作加重。在使车身侧倾而使转向角产生的跨骑型车辆中,向探测到障碍物一侧的相反侧的手把操作成为反向手把操作,该反向手把操作成为向探测到障碍物一侧的前进道路变更的起点。通过抑制该反向手把操作,能够抑制向探测到障碍物一侧的前进道路变更。这样,能够根据车辆周围的状况而实施适当的辅助转向控制,能够提高驾驶支援系统的效果。
17.根据上述(2)的方案,直至探测到本车向探测到障碍物一侧的前进道路变更预测动作为止,能够如通常那样产生辅助转矩。由此,能够实施驾驶员的不适感少的辅助转向控制。
18.根据上述(3)的方案,除了在本车后方的左右任一侧实际探测到其他车的存在的情况之外,在预测到其他车的存在的情况下,也能够实施适当的辅助转向控制。
附图说明
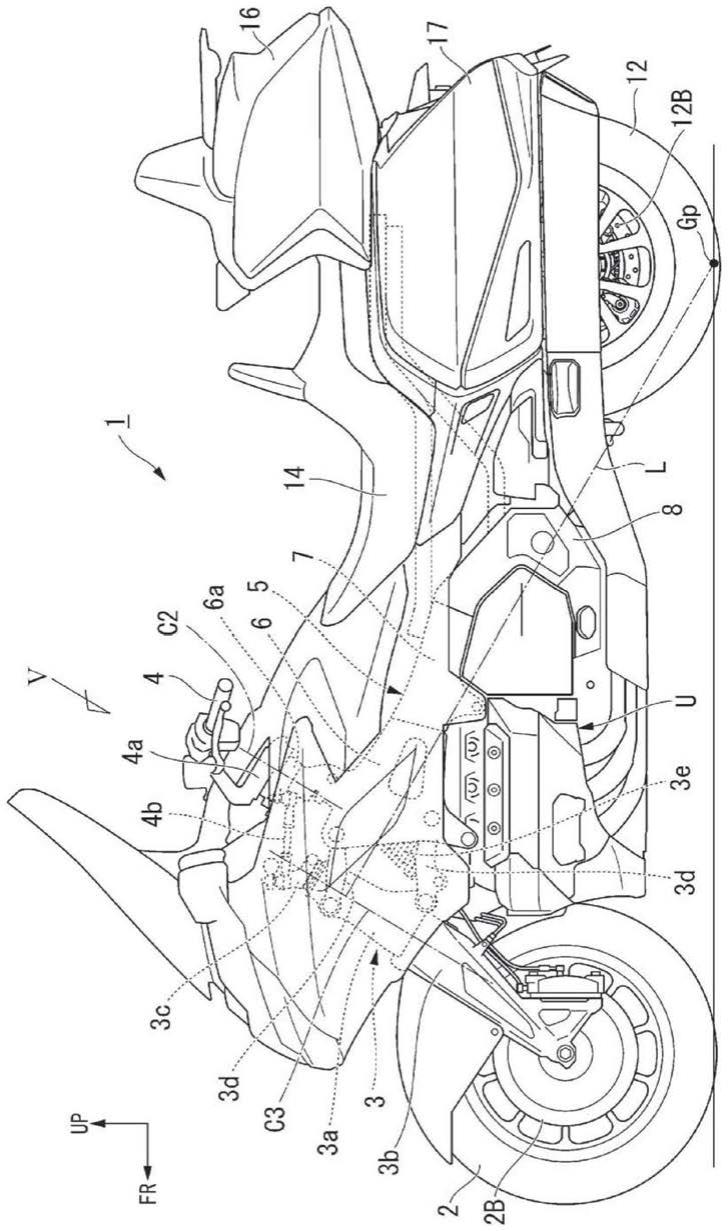
19.图1是本发明的实施方式中的机动二轮车的左侧视图。
20.图2是上述机动二轮车的控制装置的构成图。
21.图3是上述机动二轮车的转向辅助装置的构成图。
22.图4是上述转向辅助装置的晃动抑制辅助转矩算出块的构成图。
23.图5是图1的v向视图。
24.图6是表示上述机动二轮车的驾驶支援系统的各功能的警告例、以及向高稳定化控制转变时的触发案的表。
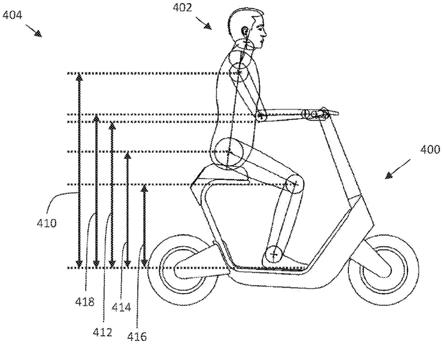
25.图7是上述驾驶支援系统的追尾减轻制动的警告阈值的说明图。
26.图8是上述驾驶支援系统的车道脱离警告的警告阈值的说明图。
27.图9是上述驾驶支援系统的盲点监测的警告阈值的说明图。
28.图10是表示上述转向辅助装置的辅助强度与车速的关系的坐标图。
具体实施方式
29.以下,参照附图来说明本发明的实施方式。需要说明的是,以下的说明中的前后左右等的朝向只要没有特别记载,则就与以下说明的车辆中的朝向相同。在以下的说明所使用的图中适当位置示出表示车辆前方的箭头fr、表示车辆左方的箭头lh、表示车辆上方的箭头up、表示车身左右中心的线cl。
30.《车辆整体》
31.如图1所示,本实施方式适用于具备大型的前围的机动二轮车(跨骑型车辆)1。机动二轮车1的前轮2支承于前轮悬架装置3。前轮悬架装置3支承于车架5的前端部。在车架5的前端部设置有对前轮悬架装置3进行支承的前块6。在前块6的上部安装有前轮转舵用的车把4。车把4具备骑手(驾驶员)j把持的左右一对的把手。
32.在前块6的后方,左右一对的主框架7向斜下后方延伸。左右主框架7的后端部分别与左右一对的枢轴框架8的上端部连接。在左右主框架7的下方且左右枢轴框架8的前方搭载有例如包含水平对置六气缸型的发动机的动力单元u。
33.在左右枢轴框架8上支承有摆臂11的前端部。在摆臂11的后端部支承有机动二轮车1的后轮12。在摆臂11的前部与车架5的前后中间部之间夹设有未图示的后缓冲件。
34.在左右枢轴框架8的后部连接有后框架9的前端部。在后框架9的上方配置有乘员就座用的座椅14。在座椅14的下方配置有燃料箱15。在座椅14的后方配置有后行李箱16。在后行李箱16的下方的左右两侧分别配置有左右鞍囊17。
35.机动二轮车1具备对前轮2进行制动的前轮制动器2b和对后轮12进行制动的后轮制动器12b。前后制动器2b、12b分别是液压盘式制动器。机动二轮车1具备供排针对前后制动器2b、12b的液压的制动致动器42(参照图5)。机动二轮车1构成使前后制动器2b、12b与骑手j操作的制动杆及制动踏板等制动操作件电气地协作的线控式的制动系统。
36.《前轮悬架装置》
37.前轮悬架装置3具备:在前块6的上端部设置的手把支承部6a;能够转动地支承于手把支承部6a的手把支柱4a;与车架5分体的头管3a;能够转动地支承于头管3a的前叉构件3b;能够一体转动地安装于前叉构件3b的上端部的转舵构件3c;将转舵构件3c与手把支柱4a连结的连杆构件4b;将头管3a能够摆动地连结于前块6的摆动臂3d;以及夹设在前叉构件3b与前块6之间的缓冲单元3e。
38.前叉构件3b在左右叉的下端部支承前轮2。在前叉构件3b的上端部一体地设置有转向轴,该转向轴穿过支承于头管3a。转向轴的上端部向头管3a的上方突出,在其上端部安装有转舵构件3c。
39.以下,将手把支柱4a相对于手把支承部6a的转动中心轴线称为手把转动轴线c2。将前叉构件3b相对于头管3a的转动中心轴线称为转向轴线c3。转向轴线c3比手把转动轴线c2向前方偏置(分离)。转向轴线c3与手把转动轴线c2在车辆的1g状态下实质上相互平行。
40.图5是图1中的从沿着转向轴线c3及手把转动轴线c2的箭头v方向观察的向视图。在图5中,连杆构件4b与转舵构件3c及手把支柱4a一起形成平行连杆。由此,车把4的转向角与前轮2的转舵角相互相同。
41.参照图1,摆动臂3d中,前端部能够上下摆动地支承于头管3a,并且后端部能够上下摆动地支承于前块6。摆动臂3d具备上下一对的臂构件。摆动臂3d能够使头管3a以规定的轨迹进行上下移动。例如在下臂构件上连结有缓冲单元3e的下端部。
42.前轮悬架装置使摆动臂3d向上方摆动,从而使前叉构件3b及头管3a进行上方移动。此时,下臂构件使缓冲单元3e的下端部进行上方移动,从而使缓冲单元3e压缩。
43.前轮悬架装置使摆动臂3d向下方摆动,从而使前叉构件3b及头管3a进行下方移动。此时,下臂构件使缓冲单元3e的下端部进行下方移动,从而使缓冲单元3e伸长。
44.《控制装置》
45.图2是本实施方式中的机动二轮车1的控制装置23的构成图。
46.机动二轮车1具备基于从各种传感器类21获取的探测信息,来对各种装置类22进行工作控制的控制装置23。控制装置23构成为例如一体或多体的电子控制装置(ecu:electronic control unit)。控制装置23可以至少一部分通过软件与硬件的协同配合来实现。控制装置23包括对发动机10的运转进行控制的燃料喷射控制部、点火控制部及节气门控制部。机动二轮车1构成使节气门装置48等发动机辅机与骑手j操作的油门把手等油门操作件电气地协作的线控式的发动机控制系统。
47.各种传感器类21除了包括节气门传感器31、车轮速度传感器32及制动压力传感器33之外,还包括车身加速度传感器34、转向角传感器35、转向转矩传感器36及车速传感器37、以及外部探测机构38。
48.各种传感器类21探测骑手j的各种操作输入、机动二轮车1及乘员的各种状态、以及本车周围的状况。各种传感器类21向控制装置23输出各种探测信息。
49.节气门传感器31探测节气门操纵把手等油门操作件的操作量(加速要求)。
50.制动压力传感器33探测所述制动操作件的操作力(减速要求)。
51.车身加速度传感器34是五轴或六轴的imu(inertial measurement unit:惯性计测装置)。车身加速度传感器34探测车身中的三轴(侧倾轴、俯仰轴、横摆轴)的角速度及加速度,再根据其结果来探测角度。以下,有时将车身加速度传感器34称为车身角速度传感器34。
52.转向角传感器35例如是设置于转向轴(转向轴或手把转动轴)的电位计。转向角传感器35探测转向轴相对于车身的转动角度(转向角度)。
53.转向转矩传感器36例如是设置于前叉构件3b的转向轴(或手把支柱4a的转动轴)的磁致伸缩式转矩传感器,探测从车把4输入的扭转转矩(转向输入)。转向转矩传感器36是探测向车把4(转向操作件)输入的转向力的载荷传感器的一例。
54.实施方式的前轮悬架装置3中,对车把4进行支承的手把支柱4a的转动轴与能够对前轮2进行转向的转向轴相互分体,但是并不局限于此。例如,也可以如通常的前轮悬架装置那样,使手把转动轴与转向轴(前轮转动轴)相互相同。也可以是前轮悬架装置支承于车架5的前端部的头管的结构。
55.外部探测机构38例如包括相机、雷达装置、探测器、以及物体识别装置。
56.相机例如是利用了ccd(charge coupled device)、cmos(complementary metal oxide semiconductor)等固体摄像元件的数码相机。相机安装于机动二轮车1的任意的部位。在拍摄前方的情况下,相机安装于车身部件(包括转舵侧及非转舵侧)、各种外装部件等。相机例如周期性地反复拍摄机动二轮车1的周边(例如前后左右)。相机拍摄到的图像被进行适当的图像处理,成为所希望的图像数据而在各种控制中使用。来自相机的信息用于探测方向的物体的位置、种类、速度等的识别,基于该识别来进行机动二轮车1的驾驶辅助控制、自动驾驶控制等。例如,相机也可以是不仅拍摄可见光而且也拍摄红外线等不可见光的相机。
57.雷达装置向机动二轮车1的周边发射毫米波等电波,并检测由物体反射的电波(反射波)来至少探测物体的位置(距离及方位)。雷达装置安装于机动二轮车1的任意的部位。雷达装置探测机动二轮车1的前后左右的物体的位置及速度。
58.探测器是lidar(light detection and ranging)。探测器向机动二轮车1的周边照射光,并测定散射光。探测器基于从发光到受光为止的时间,来探测到对象的距离。被照射的光例如是脉冲状的激光。探测器安装于机动二轮车1的任意的部位。
59.物体识别装置对由相机、雷达装置及探测器中的一部分或全部检测的检测结果进行传感器融合处理,来识别物体的位置、种类、速度等。物体识别装置将识别结果向控制装置23输出。物体识别装置还可以将相机、雷达装置及探测器的检测结果直接向控制装置23输出。也可以省略物体识别装置。
60.在机动二轮车1中采用自动驾驶系统。
61.在此,车辆的自动驾驶中存在以下的程度。自动驾驶的程度例如能够以小于规定的基准或为规定的基准以上这样的尺度来判断。自动驾驶的程度小于规定的基准例如是执行手动驾驶的情况、或者仅acc(adaptive cruise control system)、lkas(lane keeping assistance system)等驾驶支援装置工作的情况。自动驾驶的程度小于规定的基准的驾驶模式是“第一驾驶模式”的一例。
62.自动驾驶的程度为规定的基准以上例如是控制程度比acc、lkas高的alc(auto lane changing)、lsp(low speed car passing)等驾驶支援装置工作的情况、或者执行甚至是车道变更、汇合、分支都自动地进行的自动驾驶的情况。自动驾驶的程度为规定的基准以上的驾驶模式是“第二驾驶模式”的一例。
63.关于上述“规定的基准”,能够任意设定。第一驾驶模式为手动驾驶,第二驾驶模式为自动驾驶。本实施方式虽然适用于相当于第一驾驶模式的驾驶辅助控制(驾驶支援系统),但是也可以适用于自动驾驶控制。
64.参照图2,各种装置类22中包括发动机控制机构45、制动致动器42及转向致动器43。
65.发动机控制机构45包括燃料喷射装置46、点火装置47及节气门装置48等。即,发动机控制机构45包括使发动机10驱动的发动机辅机。
66.制动致动器42根据向制动操作件的操作,向前后制动器2b、12b供给液压而使它们工作。制动致动器42兼任abs(anti-lock brake system)的控制单元。
67.转向致动器43向从车把4至前叉构件3b的转向机构输出转向转矩。转向致动器43根据转向转矩传感器36的探测信息,来使自身的驱动源即电动马达工作,来对转向机构施加辅助转矩。转向致动器43包括电气性地控制所述电动马达的工作的st-ecu。
68.参照图5,转向致动器43配置在手把支承部6a的左侧方而安装于车架5。转向致动器43将所述电动马达的驱动轴43a与手把转动轴平行地配置。摆动臂43b能够一体转动地安装于驱动轴43a。摆动臂43b经由连结杆43c与手把支柱4a的致动器连结部4a1连结。由此,所述电动马达的驱动力(转矩)能够向手把支柱4a传递,由此来辅助前轮2的转向。
69.《转向辅助控制》
70.参照图1,车身加速度传感器34支承于机动二轮车1的车身(例如车架5)。例如,车身加速度传感器34在侧视观察下配置于将后轮12的接地点gp与头管3a的大致中央部连结的线段l的附近。车身加速度传感器34探测机动二轮车1的横摆方向的角速度y和侧倾方向的角速度r。以下,有时将横摆方向的角速度y称为横摆角速度y。需要说明的是,实施方式的车身不仅是指车架5,还包括与车架5一体地作出侧倾、俯仰及横摆这样的行为的结构。
71.在机动二轮车1的低速时,具有通过车把4的操作实施的转舵(横摆)发生之后车身的倾斜(侧倾)发生的特性。即,在机动二轮车1的低速时,横摆先发生,因此优选较多地探测横摆角速度y。另一方面,在机动二轮车1的高速时,具有车身的倾斜(侧倾)发生之后转舵(横摆)发生的特性。即,在机动二轮车1的高速时,侧倾先发生,因此优选较多地探测侧倾角速度r。将该特性称为机动二轮车1的转舵特性。
72.参照图4,控制装置23将车身加速度传感器34探测到的横摆角速度y与侧倾角速度r合成,生成合成角速度s。控制装置23根据探测到的车速v,如以下那样改变车身加速度传
感器34探测到的横摆角速度y及侧倾角速度r的加权而进行合成。即,根据上述的机动二轮车1的转舵特性,在车速v低时,使横摆角速度y的加权比侧倾角速度r的加权大地进行合成,在车速v高时,使侧倾角速度r的加权比横摆角速度y的加权大地进行合成。
73.合成角速度s的生成例如下面的(1)式所示,可以将横摆角速度y乘以第一调整值ad1所得到的值(y
×
ad1)与侧倾角速度r乘以第二调整值ad2所得到的值(r
×
ad2)相加,由此生成合成角速度s。
74.s=y
×
ad1 r
×
ad2
…
(1)
75.在该情况下,第一调整值ad1设定为在低速侧大而在高速侧变小。第二调整值ad2设定为在低速侧小而在高速侧变大。
76.图3是转向辅助装置50的构成图。
77.转向辅助装置50具备转向转矩传感器36、车速传感器37、车身角速度传感器34、外部探测机构38、控制装置23及转向致动器43。
78.车速传感器37例如探测机动二轮车1的动力单元u的输出轴的旋转速度,根据该旋转速度来探测后轮12的旋转速度、甚至机动二轮车1的车速。需要说明的是,也可以从abs及tcs(traction control system)中的至少一方得到车轮速度信息来探测车速。
79.控制装置23具备动力辅助转矩算出块200、晃动抑制辅助转矩算出块300、以及施加转矩算出部400。各块200、300能够单独动作,也能够作为整体进行动作。
80.动力辅助转矩算出块200基于车速v和转向转矩ts,算出向车把4施加的动力辅助转矩tp。车速v根据车速传感器37的探测信息即驱动轮(后轮12)的旋转速度来算出。转向转矩ts相当于驾驶员向车把4的输入转矩,根据转向转矩传感器36的探测信息来算出。动力辅助转矩tp是用于减轻驾驶员的车把4的转向的转矩。
81.晃动抑制辅助转矩算出块300基于车速v、横摆角速度y及侧倾角速度r,来算出向车把4施加的晃动抑制辅助转矩tw。横摆角速度y及侧倾角速度r根据车身角速度传感器34的探测信息来算出。晃动抑制辅助转矩tw是用于抑制机动二轮车1的晃动的转矩。例如,在机动二轮车1向左倾斜的情况下,晃动抑制辅助转矩tw作用在将车把4及前轮2向左操作的方向上。在机动二轮车1向右倾斜的情况下,晃动抑制辅助转矩tw作用在将车把4及前轮2向右操作的方向上。
82.施加转矩算出部400基于外部探测机构38的探测信息等,来算出后述的施加转矩tms。
83.控制装置23具备加法运算器224及马达驱动部226。
84.如下面的(2)式所示,加法运算器224将动力辅助转矩tp与晃动抑制辅助转矩tw相加,生成辅助转矩tm。加法运算器224将生成的辅助转矩tm向马达驱动部226输出。
85.tm=tp tw
…
(2)
86.马达驱动部226将辅助转矩tm转换成转矩电流,并向转向致动器43的电动马达供给。电动马达在被供给转矩电流的期间进行驱动,产生与转矩电流对应的驱动力。电动马达的驱动力经由连结杆43c等向手把支柱4a传递,对车把4及前轮2的转动进行辅助。即,对车把4及前轮2施加与辅助转矩tm对应的驱动力(辅助力)。
87.参照图4,晃动抑制辅助转矩算出块300具备合成角速度生成部302、乘法运算器304、第一车速修正系数生成部306、第二车速修正系数生成部308、乘法运算器310、加法运
算器312、除法运算器314、以及乘法运算器316。
88.合成角速度生成部302将车身角速度传感器34探测到的横摆角速度y与侧倾角速度r合成,来生成表示机动二轮车1的行为的合成角速度(车身行为角速度)s。
89.乘法运算器304将合成角速度s与合成角速度s相乘而生成合成角速度s的平方。
90.第一车速修正系数生成部306基于车速v来生成抑制晃动的第一车速修正系数f。
91.第二车速修正系数生成部308基于车速v来生成抑制晃动的第二车速修正系数g。
92.乘法运算器310将第二车速修正系数g与合成角速度s的平方相乘。
93.加法运算器312将乘法运算器310输出的值(g
×
s2)与常数α相加。
94.除法运算器314将第一车速修正系数f除以加法运算器312输出的值(g
×
s2 α)。
95.乘法运算器316将除法运算器314输出的值(f/(g
×
s2 α))与合成角速度s相乘。即,乘法运算器316输出下面的(3)式所示的晃动抑制辅助转矩tw。
96.tw=f
×
s/(g
×
s2 α)
…
(3)
97.在机动二轮车1晃动的情况下(发生驾驶员非有意倾斜的情况下),合成角速度s成为相对小的值。在机动二轮车1因驾驶员的体重移动的操作而倾斜的情况下,合成角速度s成为相对大的值。针对这些情况,通过(3)式算出晃动抑制辅助转矩tw,由此得到以下的效果。即,在合成角速度s大时,能够减小晃动抑制辅助转矩tw。因此,能够以不干扰驾驶员的基于体重移动进行的操作的方式设定晃动抑制辅助转矩tw,来实现驾驶性的提高。
98.如前所述,合成角速度生成部302在低速侧增大横摆角速度y的加权并减小侧倾角速度r的加权而将它们合成(相加)。合成角速度生成部302在高速侧减小横摆角速度y的加权并增大侧倾角速度r的加权而将它们合成(相加)。鉴于机动二轮车1的转舵特性,在高精度地探测机动二轮车1的行为这一点上优选在低速时较多地探测横摆角速度y,在高速时较多地探测侧倾角速度r。
99.并且,控制装置23在机动二轮车1的行为大的情况下,判断为驾驶员的基于体重操作进行的行为而减小辅助转矩tw。控制装置23在机动二轮车1的行为小的情况下,判断为不是驾驶员的体重操作而是车身的晃动,并增大辅助转矩t。
100.这样,无论机动二轮车1是低速时还是高速时,对于驾驶员的操作都能够进行没有不适感的晃动抑制辅助。
101.然而,在进行前述的驾驶辅助控制的情况下,在机动二轮车1产生非骑手故意的行为。因此,与未进行驾驶辅助控制时的通常的辅助转向控制相比,优选提高车身的稳定化的效果。即,在驾驶辅助控制的起动时,优选使辅助转矩tm增加。在本实施方式中,在机动二轮车1的驾驶支援系统(aras:advanced rider assistance system)的规定的功能(包含警告)工作时,向重视车身行为稳定性的控制转变。
102.在本实施方式中,适用重视车身行为稳定性的控制的功能是机动二轮车1的驾驶支援系统的各功能中的例如以下的三个。
103.第一,为追尾减轻制动(cmbs:collision mitigation brake system),第二,为车道脱离警告(ldw:lane departure warning),第三,为盲点监测(bsi:blind spot information)。
104.首先,说明cmbs的例子。
105.参照图6、图7,在实施方式的cmbs中,设定三等级的警告阈值ttc。cmbs的警告阈值
ttc使用相对于本车m前方的其他车t等障碍物的相对时间距离(以当前速度在规定时间内前进的距离)。第一警告阈值t1是使用了指示灯、液晶面板等的进行注意显示(第一警告)时的阈值。第一警告在距障碍物的相对时间距离成为了阈值t1以下时起动。
106.第二警告阈值t2是进行比第一警告强的第二警告(例如使车身的身体接触部分振动等对骑手的触觉警告、以及进行弱制动等使车身行为发生的警告)时的阈值。第二警告在距障碍物的相对时间距离成为了比阈值t1短的阈值t2以下时起动。
107.第三警告阈值t3是进行比第二警告强的第三警告(例如基于更强的振动等进行的警告、以及基于更强的制动等进行的警告)时的阈值。第三警告在距障碍物的相对时间距离成为了比阈值t2短的阈值t3以下时起动。
108.距障碍物的相对时间距离越短,则第一至第三各警告设定得越强。
109.在实施方式中,在距障碍物的相对时间距离成为了阈值t3以下时(第三警告标志设立时),向以机动二轮车1的姿态控制的提高为优先的高稳定化控制转变。在高稳定化控制中,将辅助转向控制增益修正为更高的高稳定增益。由此,抑制辅助转矩tm的减少而维持为高的值,实现机动二轮车1的姿态控制的提高。
110.接下来,说明ldw的例子。
111.参照图6、图8,在实施方式的ldw中,设定三等级的警告阈值ttld。ldw的警告阈值ttld使用从车辆通行带(行车道)的划分线(中央线、边界线及外侧线等)l1到本车的距离。第一警告阈值t1是使用了指示灯、液晶面板等的进行注意显示(第一警告)时的阈值。第一警告在距划分线l1的距离成为了阈值t1以下时起动。
112.第二警告阈值t2是进行比第一警告强的第二警告(例如使车身的身体接触部分振动等对骑手的触觉的警告、以及进行弱制动等使车身行为发生的警告)时的阈值。第二警告在距划分线l1的距离成为了比阈值t1短的阈值t2以下时起动。需要说明的是,阈值t2包括距离为0的情况。即,也可能有在即将脱离车道之前第二警告起动的设定。
113.第三警告阈值t3是进行比第二警告强的第三警告(例如基于更强的振动等进行的警告、以及基于更强的制动等进行的警告)时的阈值。第三警告在距划分线l1的距离成为了比阈值t2短的阈值t3以下时起动。需要说明的是,阈值t3包括负的距离的情况。即,也可能有在车道脱离量成为了阈值t3以上时第三警告起动的设定。
114.距划分线l1的距离越短,或向负侧越增大,则第一至第三各警告设定得越强。
115.在实施方式中,在距划分线l1的距离成为了阈值t3以下时(第三警告标志设立时),以优先提高机动二轮车1的姿态控制的、抑制进一步向划分线l1接近的方式,调整辅助转向控制增益。向高稳定化控制转变。在高稳定化控制中,将辅助转向控制增益修正为更高的高稳定增益。
116.在该控制中,例如图8所示,在本车m向左侧移动而距划分线l1(外侧线等)的距离成为了阈值t3以下的情况下,为了抑制本车m进一步向左侧移动,限制成为向左侧移动的起点的朝向右侧的反向手把操作。具体而言,以使向右侧的手把操作比向左侧的手把操作变重的方式调整辅助转向控制增益。例如,在该控制中,仅对于朝向确认到向划分线l1接近的一侧的相反侧的反向手把操作,将辅助转向控制增益修正为更高的高稳定增益,对于朝向确认到向划分线l1接近的一侧的手把操作,维持使辅助转矩tm减少的控制。
117.由此,抑制辅助转矩tm的减少而维持为高的值,实现机动二轮车1的姿态控制的提
高。
118.接下来,说明bsi的例子。
119.参照图6、图9,在实施方式的bsi中,设定二等级的警告阈值。bsi的警告阈值中使用预先确定的探测标志。
120.bsi的警告阈值中使用的探测标志例如是以下的第一标志及第二标志这两个标志。
121.第一标志是表示在比本车m靠后方的左右任一个检测区域ar探测到其他车t的存在的情况的标志。第二标志是表示在第一标志设立的状态下,探测到本车m向探测到其他车t一侧的前进道路变更预测动作(预测前进道路变更的动作)的情况的标志。
122.第一标志表示在实施方式中通过相机、雷达等实际探测到其他车t的情况,但是并不局限于此。例如,第一标志也可以是通过在同一车道内位于本车m的后方的其他车t点亮左右任一侧的方向指示灯来预测而探测到其他车t的存在。
123.第二标志表示在实施方式中确认到其他车t的存在一侧的本车m的方向指示灯的工作,但是并不局限于此。例如,第二标志也可以表示作为前进道路变更预测动作而探测到本车m的骑手的就座位置、就座姿态、反向手把等的操作中的至少一个的情况。
124.在第一标志设立时(在检测区域探测到其他车t的存在时),第一警告起动。第一警告例如是使用了指示灯、液晶面板等的注意显示。
125.在第二标志设立时(探测到前进道路变更预测动作时),进行比第一警告强的第二警告(例如使车身的身体接触部分振动等对骑手的触觉的警告、以及进行规定以上的强制动等使车身行为发生的警告),并且为了抑制向确认到其他车t的存在一侧的侧倾(甚至车道变更)而调整辅助转向控制增益。
126.具体而言,以使向确认到其他车t的存在一侧的相反侧的反向手把操作比向确认到其他车t的存在一侧的手把操作变重的方式调整辅助转向控制增益。例如,在该控制中,仅对于向确认到其他车t的存在一侧的相反侧的反向手把操作,将辅助转向控制增益修正为更高的高稳定增益,对于向确认到其他车t的存在一侧的手把操作,维持使辅助转矩tm减少的控制。
127.以下的数学式1是在aras的工作或工作警告存在的标志设立时用于算出操纵性可变用的施加转矩tms的式子。式中a表示前轮惯性修正系数,通过(a flagaras
×
gainaras)将前轮进动效应(陀螺力矩效应)放大。式中iwheel表示前轮旋转惯性,ωwheel表示前轮旋转角速度,ω表示车身侧倾角速度。
128.【数学式1】
129.t
ms
=(a flag
aras
×
gain
aras
)
·iwhee
/
·
ω
whee
l
×
ω
130.参照图10的坐标图来说明实施方式的转向辅助的强度。在图10的坐标图中,纵轴表示相对于侧倾角速度的辅助强度,横轴表示车速。
131.没有控制的原本的机动二轮车1具有的操纵性成为沿着坐标图的横轴的操纵性。相对于此,在减弱舵的打舵特性的控制(图的区域r1)中,在从中速区域至高速区域之间,使辅助强度向负侧增加。由此,使辅助转矩tm整体减少而有助于轻快的操纵性。
132.在增强舵的打舵特性的控制(图的区域r2)中,在从中速区域至高速区域之间使辅助强度向正侧增加。由此,使辅助转矩tm整体增加而有助于稳重的操纵性。此时,得到仿佛
使前轮2的陀螺力矩增加那样的操纵性。
133.除了这些控制之外,在使辅助强度进一步向正侧增加的控制(图的区域r3)中,在从中速区域至高速区域之间,向区域r2进一步加入数学式1的施加转矩tms。由此,使辅助转矩tm整体进一步增加而有助于直线前进性的增加(高稳定化控制)。
134.特别是在本车m后方的左右任一个检测区域探测到其他车t的存在时,进行抑制本车m向同侧的车道变更(前进道路变更)的控制。即,进行抑制(加重)向探测到其他车t一侧的相反侧的手把操作(成为车道变更动作的起点的反向手把操作)的控制。此时,通过使向确认到其他车t的存在一侧的手把操作容易进行(变轻),从而抑制向其他车t侧的车道变更的效果进一步提高。在未探测到其他车t的存在的情况下,快速地将反向手把抑制控制复位,返回通常的辅助转向控制而继续进行驾驶支援。
135.这样,在aras工作时,能够以aras工作的阈值为触发而向以机动二轮车1的姿态控制的提高为优先的控制转变。特别是在bsi的工作时,在本车m后方的左右任一个检测区域探测到其他车t的存在时,为了抑制本车m向同侧的车道变更而抑制反向手把操作。由此,能够提高bsi的效果。
136.如以上说明的那样,上述实施方式中的转向辅助装置50是使车身(例如车架5)向侧倾方向摆动而使转向轮(例如前轮2)产生转向角的跨骑型车辆(例如机动二轮车1)的转向辅助装置50。转向辅助装置50具备:向对前轮2进行支承的前轮悬架装置3施加转向方向的辅助转矩tm的转向致动器43;对转向致动器43进行驱动控制的控制装置23;以及探测车辆周围的状况的外部探测机构38。
137.控制装置23在进行驾驶支援控制时,向重视车身行为稳定性的控制转变。控制装置23基于aras(cmbs、ldw、bsi等)的警告、工作判断阈值信息、或者为工作中的意旨的信息,使控制增益变化。由此,能够根据aras工作时的各状况来实施更适当的程度的辅助转向控制,能够实现车辆的姿态控制的提高。
138.并且,在上述转向辅助装置50中,在外部探测机构38在本车m的左右任一侧探测到障碍物(其他车t)的情况下,控制装置23以使向探测到障碍物一侧的相反侧的手把操作比未探测到障碍物的情况加重的方式(难以转舵的方式),控制辅助转矩(tm)。对于向探测到障碍物一侧的手把操作,控制装置23维持转向辅助而使手把相对地变轻(容易转舵)。
139.根据该结构,通过驾驶支援系统来探测本车m的左右的障碍物,并基于该障碍物探测信息,加重向探测到障碍物一侧的相反侧的手把操作。在使车身侧倾而使转向角产生的跨骑型车辆中,向探测到障碍物一侧的相反侧的手把操作成为反向手把操作,该反向手把操作成为向探测到障碍物一侧的前进道路变更的起点。通过抑制该反向手把操作,从而能够抑制向探测到障碍物一侧的前进道路变更。这样,能够根据车辆周围的状况而实施适当的辅助转向控制,能够提高驾驶支援系统的效果。
140.在上述转向辅助装置50中,在本车m的左右任一侧探测到障碍物且探测到本车m向探测到障碍物一侧的前进道路变更预测动作的情况下,控制装置23以使向探测到障碍物一侧的相反侧的手把操作加重的方式控制辅助转矩tm。
141.根据该结构,直至探测到本车m向探测到障碍物一侧的前进道路变更预测动作为止,能够如通常那样产生辅助转矩。由此,能够实施驾驶员的不适感少的辅助转向控制。
142.在上述转向辅助装置50中,在探测到在与本车m相同的车道内位于本车m后方的其
他车t点亮左右任一侧的方向指示灯的情况时,控制装置23在方向指示灯点亮一侧预测而探测到障碍物的存在。
143.根据该结构,除了在本车m后方的左右任一侧实际探测到其他车t的存在的情况之外,在预测到其他车t的存在的情况下,也能够实施适当的辅助转向控制。
144.需要说明的是,本发明并不局限于上述实施方式。在上述的实施方式中,例如,例示了具备连杆式的前轮悬架装置3的车辆,但是并不局限于此。例如,也可以是在前轮悬架装置中具备周知的伸缩式前叉的车辆。
145.机动二轮车并不局限于驾驶员跨车身而乘车的车辆,包括具有底踏板的小型摩托车型车辆、带有原动机的自行车。并不局限于机动二轮车,也能够向使前轮及前轮悬架装置与车架5一起倾斜而转弯的跨骑型车辆适用。
146.跨骑型车辆包括驾驶员跨车身而乘车且使车身侧倾来取得平衡的全部车辆。不仅包括机动二轮车,而且也包括三轮(除了前一轮且后二轮之外,也包括前二轮且后一轮的车辆)或四轮的车辆。也包括具有底踏板的小型摩托车型车辆、带有原动机的自行车。也包括原动机中包含电动马达的车辆。
147.并且,上述实施方式中的结构为本发明的一例,能够将实施方式的构成要素置换为周知的构成要素等,在不脱离本发明的主旨的范围内能够进行各种变更。
148.【符号说明】
149.1 机动二轮车(跨骑型车辆)
150.2 前轮(转向轮)
151.3 前轮悬架装置(悬架装置)
152.23 控制装置(控制机构)
153.38 外部探测机构
154.43 转向致动器
155.50 转向辅助装置
156.tm 辅助转矩。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。