一种焊接机器人专用的防绕丝tig焊枪结构
技术领域
1.本实用新型涉及焊枪领域,尤其涉及一种焊接机器人专用的防绕丝tig焊枪结构。
背景技术:
2.焊接工艺结合自动化机器人已经发展有一段时间;焊机、送丝机与焊枪是焊接机器人必不可少的组成部分,而在焊接机器人完成各种极限任务的今天,送丝机输送焊丝一直都是一个重点与难点。
3.现有的焊枪结构往往送丝机输送焊丝过程中,非常容易出现焊丝缠绕即“绕丝”的现象,并且无法将自动送丝与焊枪相结合,做到减小体积,减少重量且能防止绕丝。
4.因此,有必要提供一种焊接机器人专用的防绕丝tig焊枪结构解决上述技术问题。
技术实现要素:
5.本实用新型提供一种焊接机器人专用的防绕丝tig焊枪结构,解决了现有的焊枪结构焊接过程中送丝机容易绕丝的技术问题;具有防绕丝功能且可以自动送丝,它将送丝机与 tig焊枪进行了结合,能够配合现代的自动化机器人,进行焊接作业,整体结构紧凑,灵巧方便,适用于各种焊接自动化平台,其轻质量的优点,也有效的减少焊接机器人末端的承载的重量,使得机器人焊接时,整体因受力变形会有所减少。
6.为解决上述技术问题,本实用新型提供的一种焊接机器人专用的防绕丝tig焊枪结构,包括焊丝校正机构、送丝机构和焊接角度调节机构,所述焊丝校正机构下方固定安装有送丝机构,所述送丝机构下方设置有走丝软管,所述走丝软管一侧安装有焊接角度调节机构,所述焊接角度调节机构一侧设置有绝缘套一,所述焊接角度调节机构下方安装有tig焊枪组件。
7.优选的,所述焊丝校正机构还包括焊丝校正器组件一、焊丝校正器组件二、组合链接柱和校正器通用接口连接件,所述校正器通用接口连接件下方安装有焊丝校正器组件一,所述校正器通用接口连接件一侧设置有组合链接柱,所述组合链接柱一侧安装有焊丝校正器组件二。
8.优选的,所述送丝机构还包括枪体连接板、双轮送丝底板、送丝校正连接组件、压丝轮组件、送丝主动齿轮、送丝从动齿轮、直流减速电机、压丝轮手调螺母和挂轴座,所述枪体连接板内侧固定安装有直流减速电机,所述直流减速电机一侧设置有双轮送丝底板,所述双轮送丝底板安装有送丝校正连接组件,所述双轮送丝底板一侧安装有压丝轮组件,所述直流减速电机输出端与送丝主动齿轮固定连接,所述送丝主动齿轮与送丝从动齿轮啮合连接,所述双轮送丝底板设置有压丝轮手调螺母,所述双轮送丝底板一侧安装有挂轴座,所述送丝校正连接组件中部穿设有焊丝校正带孔螺钉。
9.优选的,所述焊接角度调节机构还包括角度调节件一和角度调节件二,所述角度调节件一与角度调节件二活动连接。
10.优选的,所述tig焊枪组件还包括枪体座、电极座、绝缘套二、手动紧固螺母、钨极、
整流罩、空冷喷嘴、送丝嘴和导电板,所述枪体座上方与电极座固定连接,所述枪体座一侧穿设有绝缘套二,所述绝缘套二内部穿设有送丝嘴,所述电极座上方设置有手动紧固螺母,所述手动紧固螺母下方固定安装有钨极,所述钨极外侧设置有整流罩,所述整流罩下方与空冷喷嘴固定连接。
11.优选的,所述焊丝校正器组件一还包括受压弹簧、有轮轴的滑块、手动螺母和手动螺母安装板,所述手动螺母安装板穿设有手动螺母,所述手动螺母安装板一侧安装有轮轴的滑块,所述有轮轴的滑块一侧设置有受压弹簧。
12.优选的,所述焊丝校正器组件二还包括焊丝校正轮、校正轮安装基板和焊丝导向板,所述校正轮安装基板中部转动连接有焊丝校正轮,所述校正轮安装基板下方安装有焊丝导向板。
13.优选的,所述压丝轮组件还包括送丝轮、压丝轮架和双压丝轮臂,所述压丝轮架两端设置有送丝轮,所述送丝轮通过螺钉与双压丝轮臂固定连接。
14.与相关技术相比较,本实用新型提供的一种焊接机器人专用的防绕丝tig焊枪结构具有如下有益效果:
15.本实用新型提供一种焊接机器人专用的防绕丝tig焊枪结构,焊丝通过焊丝校正机构的连接件入口填丝,在焊丝校正机构中让焊丝按照校正轮所在轨迹通行,防止焊丝出现绕丝现象,通过送丝机构,将焊丝送入走丝软管中,焊丝通过走丝软管达到tig焊枪组件的送丝嘴,焊丝与tig焊枪组件配合,进行焊接作业。焊接角度调节机构可以对tig焊枪组件的焊接角度微调,可调角度为0
°
~15
°
;在此角度范围内,整个送丝过程中,焊丝均通过顺畅,无绕丝现象,解决了现有的焊枪结构焊接过程中送丝机容易绕丝的技术问题。
16.本实用新型提供一种焊接机器人专用的防绕丝tig焊枪结构,焊丝校正过程实现方式是:焊丝通过校正器通用接口进入焊丝校正器组件一;手动螺母安装板和有轮轴的滑块均有螺纹;手动螺母与这两个零件的内螺纹旋和,有轮轴的滑块受到两侧的限位作用,只会直线运动。弹簧给手动螺母传递预紧力,防止手动螺母掉落。调节好焊丝校正轮位置后,焊丝受到三个校正轮给予的外力就会按照校正轮预定给出的轨迹进行运动,不会出现绕丝现象。通过焊丝校正器组件一后,焊丝通过导丝板的导丝孔进入焊丝校正器组件二,过程与焊丝校正器组件一一致。焊丝通过焊丝校正器组件二的校正器通用接口离开焊丝校正机构。整个焊丝校正过程,无绕丝现象,送丝过程实现方式是:焊丝通过送丝校正组件进入送丝机构,直流减速电机驱动送丝主动齿轮旋转,送丝主动齿轮与两个送丝从动齿轮啮合。送丝从动齿轮与压丝轮组件的齿轮进行啮合传动,压丝轮手调螺母可以调节压丝轮与从动轮的间隙,这样可以适应不同直径的焊丝。从动齿轮轴上均有v型槽,保证焊丝顺利通过,焊丝通过走丝软管进如送丝嘴;角度调节实现方式是:一个其中一个通孔为定点圆孔,一个通孔设计成为以定点圆孔为中心,15
°
的长条孔,这样螺钉在通孔内具有15
°
调节范围,两个连接件具设计了凸台,起到硬限位的作用;焊接作业实现方式是:电流通过正极连接板,到焊枪钨极,被焊接工件连接地线,电流通过后,起电弧,侧面送丝嘴送丝进行焊接工作。
附图说明
17.图1为本实用新型提供的一种焊接机器人专用的防绕丝tig焊枪结构的一种较佳实施例的结构示意图;
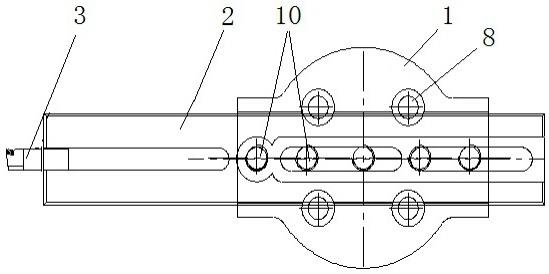
18.图2为本实用新型焊丝校正机构的结构示意图;
19.图3为本实用新型送丝机构的结构示意图;
20.图4为本实用新型送丝机构侧视图;
21.图5为本实用新型焊接角度调节机构的结构示意图;
22.图6为本实用新型tig焊枪组件的结构示意图;
23.图7为本实用新型tig焊枪组件的剖视图;
24.图8为本实用新型焊丝校正器组件一的结构示意图;
25.图9为本实用新型焊丝校正器组件二的结构示意图;
26.图10为本实用新型送丝校正连接组件的结构示意图;
27.图11为本实用新型有轮轴的滑块的结构示意图;
28.图12为本实用新型焊丝导向板的结构示意图;
29.图13为本实用新型压丝轮组件的结构示意图。
30.图中标号:1、焊丝校正机构;2、送丝机构;3、焊接角度调节机构;4、tig焊枪组件;5、绝缘套一;6、走丝软管;7、焊丝校正器组件一;8、焊丝校正器组件二;9、组合链接柱;10、校正器通用接口连接件;11、焊丝校正轮;12、校正轮安装基板;13、受压弹簧;14、有轮轴的滑块;15、手动螺母;16、手动螺母安装板;17、焊丝导向板;18、枪体连接板;19、双轮送丝底板;20、送丝校正连接组件;21、压丝轮组件;22、送丝主动齿轮;23、送丝从动齿轮;24、直流减速电机;25、压丝轮手调螺母;26、挂轴座;27、焊丝校正带孔螺钉;28、送丝轮;29、压丝轮架;30、双压丝轮臂;31、角度调节件一; 32、角度调节件二;33、枪体座;34、电极座;35、绝缘套二;36、手动紧固螺母;37、钨极;38、整流罩;39、空冷喷嘴;40、送丝嘴;41、导电板。
具体实施方式
31.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
32.实施例一:
33.请参阅图1-13,本实用新型提供一种技术方案:一种焊接机器人专用的防绕丝tig焊枪结构,包括焊丝校正机构1、送丝机构2和焊接角度调节机构3,焊丝校正机构1下方固定安装有送丝机构2,送丝机构2下方设置有走丝软管6,走丝软管6一侧安装有焊接角度调节机构3,焊接角度调节机构3一侧设置有绝缘套一5,焊接角度调节机构3下方安装有tig焊枪组件4。焊丝校正机构1还包括焊丝校正器组件一7、焊丝校正器组件二8、组合链接柱9和校正器通用接口连接件10,校正器通用接口连接件10下方安装有焊丝校正器组件一7,校正器通用接口连接件10一侧设置有组合链接柱9,组合链接柱9一侧安装有焊丝校正器组件二8。送丝机构2还包括枪体连接板18、双轮送丝底板19、送丝校正连接组件20、压丝轮组件21、送丝主动齿轮22、送丝从动齿轮23、直流减速电机24、压丝轮手调螺母25和挂轴座26,枪体连接板18内侧固定安装有直流减速电机24,直流减速电机24一侧设置有双轮送丝底板19,双轮送丝底板19安装有送丝校正连接组件20,双轮送丝底板19一侧安装有压丝轮组件21,直流减速电机24输出端与送丝主动齿轮22 固定连接,送丝主动齿轮22与送丝从动齿轮23啮合连接,双轮送丝底板19设置有压丝轮手调螺母25,双轮送丝底板19一侧安装有挂轴座26,送丝校正连接组件20中部穿设有焊丝校正带孔螺钉27。焊丝校正器组件一7还包括受压弹
簧13、有轮轴的滑块14、手动螺母15和手动螺母安装板16,手动螺母安装板16穿设有手动螺母15,手动螺母安装板16一侧安装有轮轴的滑块14,有轮轴的滑块14一侧设置有受压弹簧13。焊丝校正器组件二8还包括焊丝校正轮11、校正轮安装基板12和焊丝导向板17,校正轮安装基板 12中部转动连接有焊丝校正轮11,校正轮安装基板12下方安装有焊丝导向板17。
34.本实施方案中,焊丝通过焊丝校正机构1的连接件入口填丝,在焊丝校正机构1中让焊丝按照校正轮所在轨迹通行,防止焊丝出现绕丝现象,通过送丝机构2,将焊丝送入走丝软管6中,焊丝通过走丝软管6达到tig焊枪组件4的送丝嘴40,焊丝与tig焊枪组件 4配合,进行焊接作业。焊接角度调节机构3可以对tig焊枪组件的焊接角度微调,可调角度为0
°
~15
°
;在此角度范围内,整个送丝过程中,焊丝均通过顺畅,无绕丝现象。
35.实施例二:
36.请参阅图1-13所示,在实施例一的基础上,本实用新型提供一种技术方案:焊接角度调节机构3还包括角度调节件一31和角度调节件二32,角度调节件一31与角度调节件二32活动连接。tig焊枪组件4还包括枪体座33、电极座34、绝缘套二35、手动紧固螺母36、钨极37、整流罩38、空冷喷嘴39、送丝嘴40和导电板41,枪体座33上方与电极座34固定连接,枪体座33一侧穿设有绝缘套二35,绝缘套二35内部穿设有送丝嘴40,电极座34上方设置有手动紧固螺母36,手动紧固螺母36下方固定安装有钨极37,钨极 37外侧设置有整流罩38,整流罩38下方与空冷喷嘴39固定连接。压丝轮组件21还包括送丝轮28、压丝轮架29和双压丝轮臂30,压丝轮架29两端设置有送丝轮28,送丝轮28 通过螺钉与双压丝轮臂30固定连接。
37.本实施方案中,焊丝校正过程实现方式是:焊丝通过校正器通用接口进入焊丝校正器组件一7;手动螺母安装板16和有轮轴的滑块14均有螺纹;手动螺母15与这两个零件的内螺纹旋和,有轮轴的滑块14受到两侧的限位作用,只会直线运动。弹簧给手动螺母15 传递预紧力,防止手动螺母15掉落。调节好焊丝校正轮位置后,焊丝受到三个校正轮给予的外力就会按照校正轮预定给出的轨迹进行运动,不会出现绕丝现象。通过焊丝校正器组件一7后,焊丝通过导丝板的导丝孔进入焊丝校正器组件二8,过程与焊丝校正器组件一7一致。焊丝通过焊丝校正器组件二8的校正器通用接口离开焊丝校正机构1。整个焊丝校正过程,无绕丝现象,送丝过程实现方式是:焊丝通过送丝校正组件进入送丝机构2,直流减速电机24驱动送丝主动齿轮22旋转,送丝主动齿轮22与两个送丝从动齿轮23啮合。送丝从动齿轮23与压丝轮组件21的齿轮进行啮合传动,压丝轮手调螺母25可以调节压丝轮与从动轮的间隙,这样可以适应不同直径的焊丝。从动齿轮轴上均有v型槽,保证焊丝顺利通过,焊丝通过走丝软管6进如送丝嘴;角度调节实现方式是:一个其中一个通孔为定点圆孔,一个通孔设计成为以定点圆孔为中心,15
°
的长条孔,这样螺钉在通孔内具有15
°
调节范围,两个连接件具设计了凸台,起到硬限位的作用;焊接作业实现方式是:电流通过正极连接板,到焊枪钨极37,被焊接工件连接地线,电流通过后,起电弧,侧面送丝嘴送丝40进行焊接工作。
38.本实用新型提供的一种焊接机器人专用的防绕丝tig焊枪结构的工作原理如下:
39.第一步:焊丝通过焊丝校正机构1的连接件入口填丝,在焊丝校正机构1中让焊丝按照校正轮所在轨迹通行,防止焊丝出现绕丝现象,通过送丝机构2,将焊丝送入走丝软管 6中,焊丝通过走丝软管6达到tig焊枪组件4的送丝嘴40,焊丝与tig焊枪组件4配合,进行焊接作业。焊接角度调节机构3可以对tig焊枪组件的焊接角度微调,可调角度为 0
°
~15
°
;在此角度范围内,整个送丝过程中,焊丝均通过顺畅,无绕丝现象;
40.第二步:焊丝校正过程实现方式是:焊丝通过校正器通用接口进入焊丝校正器组件一 7;手动螺母安装板16和有轮轴的滑块14均有螺纹;手动螺母15与这两个零件的内螺纹旋和,有轮轴的滑块14受到两侧的限位作用,只会直线运动。弹簧给手动螺母15传递预紧力,防止手动螺母15掉落。调节好焊丝校正轮位置后,焊丝受到三个校正轮给予的外力就会按照校正轮预定给出的轨迹进行运动,不会出现绕丝现象。通过焊丝校正器组件一 7后,焊丝通过导丝板的导丝孔进入焊丝校正器组件二8,过程与焊丝校正器组件一7一致。焊丝通过焊丝校正器组件二8的校正器通用接口离开焊丝校正机构1。整个焊丝校正过程,无绕丝现象,送丝过程实现方式是:焊丝通过送丝校正组件进入送丝机构2,直流减速电机24驱动送丝主动齿轮22旋转,送丝主动齿轮22与两个送丝从动齿轮23啮合。送丝从动齿轮23与压丝轮组件21的齿轮进行啮合传动,压丝轮手调螺母25可以调节压丝轮与从动轮的间隙,这样可以适应不同直径的焊丝。从动齿轮轴上均有v型槽,保证焊丝顺利通过,焊丝通过走丝软管6进如送丝嘴;角度调节实现方式是:一个其中一个通孔为定点圆孔,一个通孔设计成为以定点圆孔为中心,15
°
的长条孔,这样螺钉在通孔内具有15
°
调节范围,两个连接件具设计了凸台,起到硬限位的作用;焊接作业实现方式是:电流通过正极连接板,到焊枪钨极37,被焊接工件连接地线,电流通过后,起电弧,侧面送丝嘴送丝40进行焊接工作。
41.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。