1.本发明涉及测距技术领域,特别涉及一种收发一体测距电路以及电子设备。
背景技术:
2.在智能车或机器人应用中,都会用到众多路的超声波探头,以便探测各个方向的空间距离。探头的数量会根据测量的范围以及精确度灵活测量和选用。
3.当探头数量较多时,现有技术中是针对每一超声波探头均单独设计一套信号触发和采集电路,然后再利用软件单独对每一超声波探头采集的数据进行处理,从而确定实际情况中每一超声波探头测试范围的空间距离。在上述实施过程中,每个探头都单独用电路连接,因此,每一探头均有一独立连接至控制电路的连线,线路较为复杂。
技术实现要素:
4.本发明的目的在于解决现有技术中多个超声波探头的电路方案连线较为复杂的技术问题,提供一种收发一体测距电路以及电子设备。
5.为了实现上述目的,本发明提出一种收发一体测距电路,所述收发一体测距电路包括:
6.控制电路,具有时序信号输出端、n个控制信号输出端以及m个反馈信号接收端,用于输出时序信号以及n个控制信号;
7.逻辑门电路,具有时序信号输入端、n个控制信号输入端以及n个驱动信号输出端,所述逻辑门电路的时序信号输入端与所述控制电路的时序信号输出端连接,n个所述逻辑门电路的控制信号输入端一对一连接至n个所述控制电路的控制信号输出端;并用于根据所述时序信号以及n个所述控制信号输出驱动信号;
8.探测模块,具有n个驱动信号输入端以及m个探测信号输出端,n个所述探测模块的驱动信号输入端一对一连接至n个所述逻辑门电路的驱动信号输出端,m个所述探测模块的探测信号输出端一对一连接至m个所述控制电路的反馈信号接收端;
9.所述探测模块包括n组探测电路;每一所述探测电路均包括m个探测支路;
10.对于每一所述探测电路,m个所述探测支路的驱动信号输出端互相连接以构成所述探测模块的一驱动信号输入端;n组所述探测电路的第z探测支路的探测信号输出端互相连接以构成所述探测模块的一探测信号输出端;并用于在接收到所述驱动信号进行探测并获取与所述探测支路数量对应的探测信号;
11.连接至同一反馈信号接收端的多个所述探测支路的探测信号叠加合并为一反馈信号;
12.所述控制电路,还用于接收m个所述反馈信号,并根据m个所述反馈信号确定n*m个所述探测支路中每一所述探测支路的探测结果。
13.可选地,n个所述控制信号为共时基pwm信号。
14.可选地,所述控制电路为arm处理器。
15.可选地,每一所述探测支路的探测频率不同。
16.可选地,所述收发一体测距电路还包括m个放大电路,m个所述控制电路的反馈信号接收端与m个所述探测模块的探测信号输出端之间形成m个反馈回路,每一所述放大电路均单独设置于一所述反馈回路中以将对应的所述探测模块的探测信号输出端输出的反馈信号放大。
17.可选地,所述逻辑门电路包括m个与门,每一所述与门的第一输入端与所述控制电路的时序信号输出端连接,m个所述控制电路的反馈信号接收端一对一连接至m个所述与门的第二输入端。
18.可选地,n=2,m=3。
19.为了实现上述目的,本发明还提出一种收发一体测距电路,所述收发一体测距电路包括:
20.控制电路,具有时序信号输出端、第一控制信号输出端、第二控制信号输出端、第三控制信号输出端、第一反馈信号接收端以及第二反馈信号接收端,并用于输出时序信号以及第一控制信号、第二控制信号以及第三控制信号;
21.逻辑门电路,具有时序信号输入端、第一控制信号输入端、第二控制信号输入端、第三控制信号输入端、第一驱动信号输出端、第二驱动信号输出端以及第三驱动信号输出端,所述逻辑门电路的时序信号输入端与所述控制电路的时序信号输出端连接,所述逻辑门电路的第一控制信号输入端与所述控制电路的第一控制信号输出端连接,所述逻辑门电路的第二控制信号输入端与所述控制电路的第二控制信号输出端连接,所述逻辑门电路的第三控制信号输入端与所述控制电路的第三控制信号输出端连接;并用于将所述时序信号分别与所述第一控制信号、所述第二控制信号以及所述第三控制信号进行逻辑运算以获得第一驱动信号、第二驱动信号以及第三驱动信号;
22.探测模块,具有第一驱动信号输入端、第二驱动信号输入端、第三驱动信号输入端、第一探测信号输出端以及第二探测信号输出端,所述探测模块的第一驱动信号输入端与所述逻辑门电路的第一驱动信号输出端连接,所述探测模块的第二驱动信号输入端与所述逻辑门电路的第二驱动信号输出端连接,所述探测模块的第三驱动信号输入端与所述逻辑门电路的第三驱动信号输出端连接;所述探测模块的第一探测信号输出端与所述控制电路的第一反馈信号接收端连接,所述探测模块的第二探测信号输出端与所述控制电路的第二反馈信号接收端连接;
23.所述探测模块包括第一探测电路、第二探测电路以及第三探测电路;每一所述探测电路均包括第一探测支路以及第二探测支路;
24.所述第一探测电路的第一探测支路的驱动信号输出端与所述第一探测电路的第二探测支路的驱动信号输出端连接以构成所述探测模块的第一驱动信号输入端,所述第二探测电路的第一探测支路的驱动信号输出端与所述第二探测电路的第二探测支路的驱动信号输出端连接以构成所述探测模块的第二驱动信号输入端,所述第三探测电路的第一探测支路的驱动信号输出端与所述第三探测电路的第二探测支路的驱动信号输出端连接以构成所述探测模块的第三驱动信号输入端;所述第一探测电路的第一探测支路的探测信号输出端、所述第二探测电路的第一探测支路的探测信号输出端以及所述第三探测电路的第一探测支路的探测信号输出端互相连接以构成所述探测模块的第一探测信号输出端,所述
第一探测电路的第二探测支路的探测信号输出端、所述第二探测电路的第二探测支路的探测信号输出端以及所述第三探测电路的第二探测支路的探测信号输出端互相连接以构成所述探测模块的第二探测信号输出端;并用于在接收到所述第一驱动信号、所述第二驱动信号以及所述第三驱动信号进行探测并获取与所述探测支路数量对应的第一探测信号、第二探测信号、第三探测信号、第四探测信号、第五探测信号以及第六探测信号;
25.连接至同一反馈信号接收端的多个所述探测支路的探测信号叠加合并为一反馈信号;
26.所述第一探测信号、所述第二探测信号以及所述第三探测信号叠加合并为第一反馈信号,所述第四探测信号、所述第五探测信号以及所述第六探测信号叠加合并为第二反馈信号。
27.所述控制电路,还用于接收所述第一反馈信号以及所述第二反馈信号,并根据所述第一反馈信号以及所述第二反馈信号确定所述第一探测电路的第一探测支路、第一探测电路的第二探测支路、第二探测电路的第一探测支路、第二探测电路的第二探测支路、第三探测电路的第一探测支路、第三探测电路的第二探测支路的探测结果。
28.为了实现上述目的,本发明还提出一种电子设备,所述电子设备包括如上所述的收发一体测距电路。
29.可选地,所述电子设备还包括壳体,所述壳体具有相对设置的第一安装面以及第二安装面,每一对所述测试支路分设于所述第一安装面以及所述第二安装面。
30.可选地,所述电子设备还包括壳体,所述具有相对设置的第三安装面以及第四安装面,所述第三安装面与所述第一安装面相交设置,每一对所述测试支路分设于所述第一安装面、所述第二安装面、第三安装面以及第四安装面。
31.上述发明通过将同一探测电路的探测支路用同一驱动信号进行驱动,将多个探测模块的测试电路的第z探测支路的探测信号叠加合并为一反馈信号,最后控制电路根据反馈信号确定n*m个所述探测支路中每一所述探测支路的探测结果。通过上述方案分时驱动探测支路进行检测,最后将检测信号叠加为一反馈信号,此时,可以将反馈回路尽可能简化,从而解决多个超声波探头的电路方案连线较为复杂的技术问题。
附图说明
32.下面结合附图和实施例对本发明进一步地说明;
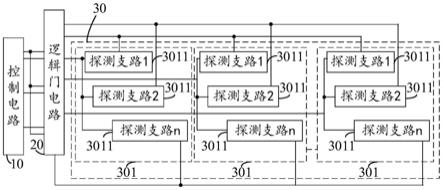
33.图1为一个实施例中收发一体测距电路的模块示意图。
34.图2为一个实施例中收发一体测距电路的控制信号的信号时序示意图。
35.图3为一个实施例中收发一体测距电路的电路示意图。
36.图4为一个实施例中收发一体测距电路的时序信号、控制信号、反馈信号的信号时序示意图。
具体实施方式
37.本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
38.为了解决现有技术中多个超声波探头的电路方案连线较为复杂的技术问题,本发明提出一种收发一体测距电路以及电子设备。
39.在一实施例中,如图1所示,收发一体测距电路包括控制电路10、逻辑门电路20以及探测模块30,控制电路10具有时序信号输出端、n个控制信号输出端以及m个反馈信号接收端。逻辑门电路20具有时序信号输入端、n个控制信号输入端以及n个驱动信号输出端,逻辑门电路20的时序信号输入端与控制电路10的时序信号输出端连接,n个逻辑门电路20的控制信号输入端一对一连接至n个控制电路10的控制信号输出端。探测模块30具有n个驱动信号输入端以及m个探测信号输出端,n个探测模块30的驱动信号输入端一对一连接至n个逻辑门电路20的驱动信号输出端,m个探测模块30的探测信号输出端一对一连接至m个控制电路10的反馈信号接收端。
40.基于上述实施例,探测模块30包括n组探测电路301;每一探测电路均包括m个探测支路3011;对于每一探测电路,m个探测支路的驱动信号输出端互相连接以构成探测模块30的一驱动信号输入端;n组探测电路的第z探测支路的探测信号输出端互相连接以构成探测模块30的一探测信号输出端。
41.其中,控制电路10输出时序信号以及n个控制信号。逻辑门电路20根据时序信号以及n个控制信号输出驱动信号。探测模块30在接收到驱动信号进行探测并获取与探测支路数量对应的探测信号,连接至同一反馈信号接收端的多个探测支路的探测信号叠加合并为一反馈信号。控制电路10,还用于接收m个反馈信号,并根据m个反馈信号确定n*m个探测支路中每一探测支路的探测结果。
42.上述实施例中,通过将同一探测电路的探测支路用同一驱动信号进行驱动,将多个探测模块30的测试电路的第z探测支路的探测信号叠加合并为一反馈信号,最后控制电路10根据反馈信号确定n*m个探测支路中每一探测支路的探测结果。通过上述方案分时驱动探测支路进行检测,最后将检测信号叠加为一反馈信号,此时,由于每一测试电路中的测试支路的驱动信号输出端互相连接,且每一测试电路的第z探测支路的探测信号输出端均可以统一连接至一传输线,测试支路的驱动信号输出端以及每一测试电路的第z探测支路的探测信号输出端均不用单独连接至控制电路10也可以实现有效检测,极大的减少重复的电路设计单元,从而可以将电路尽可能简化,以解决多个超声波探头的电路方案连线较为复杂的技术问题。由于此时的信号叠加,对控制电路10能处理的数据量的要求以及对硬件接口的数量要求也会降低,从而可以降低硬件层面的预算以实现降低成本的目的。
43.可选地,n、m、z均为大于0的自然数。
44.可选地,参照图2所示,n个控制信号为共时基pwm信号。
45.其中,共时基pwm信号是指每一路信号之间间隔一定时间间隔t,如每一路信号之间间隔t豪秒,各自输出脉冲,脉宽为t1(一般是1ms-2ms)。此时,完成一次探测的周期为nt。从而可以避免每一路控制信号控制的探测支路之间的探测的干扰。且由于此时共时基pwm信号的存在,一控制信号仅控制一测试电路,而反馈信号是叠加不同测试电路的测试支路,因此,导致最后每一反馈信号上叠加的探测信号均存在时间间隔t。从而可以方便控制信号按照时间间隔对反馈信号进行处理和拆分,而不用考虑探测信号的波形叠加的情况,极大的减轻了后续处理的数据量。另外,需要说明的是,由于此时的时间间隔控制在ms级别,在此范围内,搭载有此收发一体测距电路的设备能行进的距离及其有限,可以忽视此时的分
时对检测结果造成的时延影响。
46.可选地,控制电路10为arm(advanced risc machine)处理器。
47.可选地,,每一探测支路的探测频率不同。
48.每一探测支路的探测频率不同,可以使得相邻的探头较少干扰,此时可以通过对每一控制信号的频率或者探测支路中的探测器件的工作频率进行选用以实现不同的探测频率。
49.可选地,当探测支路为超声波探头时,对超声波探头的探测频率进行选用也可实现不用的探测频率。
50.在一实施例中,如图3所示,收发一体测距电路还包括m个放大电路(401、402),m个控制电路10的反馈信号接收端与m个探测模块30的探测信号输出端之间形成m个反馈回路,每一放大电路均单独设置于一反馈回路中以将对应的探测模块30的探测信号输出端输出的反馈信号放大。
51.其中,放大电路将反馈信号放大,可以避免因为反馈信号较弱造成的处理偏差。
52.可选地,放大电路为运放放大电路,可以通过选用现有技术中的运放放大电路实现,通过多级放大处理,可以方便控制电路10对反馈信号进行处理,在此基础上,可以在控制电路10的反馈信号接收端设置适当阈值进行比较,引入控制电的边沿触发,从而避免控制电路10在信号强度不够时进行的无效信号处理。
53.在一实施例中,如图3所示,逻辑门电路20包括m个与门,每一与门的第一输入端与控制电路10的时序信号输出端连接,m个控制电路10的反馈信号接收端一对一连接至m个与门的第二输入端。
54.基于上述方案,如图4所示,当n=2,m=3时,以时序信号为clk信号,控制信号为共时基pwm信号为例说明逻辑门电路20的工作原理:
55.arm(advanced risc machine)处理器提供一路定时器tim1,产生40khz的超声震动频率clk信号,另一路tim2是三路(根据定时器特征还可提供更多路)共时基pwm信号ch1,ch2,ch3。分别与tim1信号源通过逻辑与门后,产生三路驱动信号,即加载信源脉冲信号pwm1,pwm2,pwm3,驱动信号驱动前后两路超声波发射探头,共可驱动2*3=6路超声波探头,前后探头可以同信号源发射,互不干扰。在接收时前面3个探头和后面3个探头分别叠加接入一路反馈信号(由于信号是分时采集的,故可以明确区分是哪个探头的返回信号),通过多级放大处理,并设置适当阈值进行比较后,引入arm(advanced risc machine)处理器的边沿触发i/o管脚rx1,rx2,这样arm(advanced risc machine)处理器总共花费6个i/o口的资源就可以完成6路探头电路,7个i/o可以完成8路探头电路。接收电路只需要两组返回信号处理。线路示意图如图3所示:其中d1,d2,d3,d4,d5,d6均为无源收发一体探头。
56.arm(advanced risc machine)处理器设置好共时基tim2,使3路输出信号间隔t毫秒,各自输出脉冲,脉宽为t1(一般是1ms-2ms),这样tim2周期为t=3t。即时扫描三路探头的周期。在产生各路脉冲的同时,切换tim1超声频率,例如3路频率分别为38khz,40khz,42khz。不同的频率使相邻的探头较少干扰。前后两路接受信号分别在3路各自发射的时段内获得返回信号。例如:间隔t=100毫秒,则3路探头的工作周期为100ms,这是根据声音传播速度v=340m/s,可知能够测得的最大距离为17m。6个探头的扫描周期为300ms,扫描帧率约3帧。这完全可以满足低速小车的测距要求。若将所测距离进一步缩小,比如11米,这样扫
描周期也减小(200ms内),扫描帧率就提高5帧每秒。如此可以适应更高的速度。运行时序图如图4所示。
57.基于上述所有实施例,其测定的距离可以根据下述方式确定:
58.运动时,测距误差补偿,假设探头发射到返回的时间为t2,空气温度为c,运动载体的即时速度为v(由于超声波的工作周期很短,0.1s以内,这段时间内运动物体速度没太大变化,可认定为实时速度),测试距离为d,有
59.前进时,1.前探头 d=((331 0.6*c)/2-v/2)*t2
60.2.后探头 d=((331 0.6*c)/2 v/2)*t2
61.后退时则相反。
62.基于上述方案,可选地,还可进一步扩展,例如前后左右四个方向各安装了3路探路,只需增加两路i/o口,用以接收左右的返回信号,这样只要8路i/o就可提供12路探头的处理。既可扩展发射通道,也可扩展接收通道。凡此扩展,原理相同。
63.可选地,n=2,m=3。
64.上述实施例为一优选实施例。
65.为了解决上述问题,本发明还提出一种收发一体测距电路,参考图3,收发一体测距电路包括:
66.控制电路10,具有时序信号输出端、第一控制信号输出端、第二控制信号输出端、第三控制信号输出端、第一反馈信号接收端以及第二反馈信号接收端,并用于输出时序信号以及第一控制信号、第二控制信号以及第三控制信号;
67.逻辑门电路20,具有时序信号输入端、第一控制信号输入端、第二控制信号输入端、第三控制信号输入端、第一驱动信号输出端、第二驱动信号输出端以及第三驱动信号输出端,逻辑门电路20的时序信号输入端与控制电路10的时序信号输出端连接,逻辑门电路20的第一控制信号输入端与控制电路10的第一控制信号输出端连接,逻辑门电路20的第二控制信号输入端与控制电路10的第二控制信号输出端连接,逻辑门电路20的第三控制信号输入端与控制电路10的第三控制信号输出端连接;并用于将时序信号分别与第一控制信号、第二控制信号以及第三控制信号进行逻辑运算以获得第一驱动信号、第二驱动信号以及第三驱动信号;
68.探测模块30,具有第一驱动信号输入端、第二驱动信号输入端、第三驱动信号输入端、第一探测信号输出端以及第二探测信号输出端,探测模块30的第一驱动信号输入端与逻辑门电路20的第一驱动信号输出端连接,探测模块30的第二驱动信号输入端与逻辑门电路20的第二驱动信号输出端连接,探测模块30的第三驱动信号输入端与逻辑门电路20的第三驱动信号输出端连接;探测模块30的第一探测信号输出端与控制电路10的第一反馈信号接收端连接,探测模块30的第二探测信号输出端与控制电路10的第二反馈信号接收端连接;
69.探测模块30包括第一探测电路302、第二探测电路303以及第三探测电路304;每一探测电路均包括第一探测支路以及第二探测支路;
70.第一探测电路302的第一探测支路的驱动信号输出端与第一探测电路302的第二探测支路的驱动信号输出端连接以构成探测模块30的第一驱动信号输入端,第二探测电路303的第一探测支路的驱动信号输出端与第二探测电路303的第二探测支路的驱动信号输
出端连接以构成探测模块30的第二驱动信号输入端,第三探测电路304的第一探测支路的驱动信号输出端与第三探测电路304的第二探测支路的驱动信号输出端连接以构成探测模块30的第三驱动信号输入端;第一探测电路302的第一探测支路的探测信号输出端、第二探测电路303的第一探测支路的探测信号输出端以及第三探测电路304的第一探测支路的探测信号输出端互相连接以构成探测模块30的第一探测信号输出端,第一探测电路302的第二探测支路的探测信号输出端、第二探测电路303的第二探测支路的探测信号输出端以及第三探测电路304的第二探测支路的探测信号输出端互相连接以构成探测模块30的第二探测信号输出端;并用于在接收到第一驱动信号、第二驱动信号以及第三驱动信号进行探测并获取与探测支路数量对应的第一探测信号、第二探测信号、第三探测信号、第四探测信号、第五探测信号以及第六探测信号;
71.连接至同一反馈信号接收端的多个探测支路的探测信号叠加合并为一反馈信号;
72.第一探测信号、第二探测信号以及第三探测信号叠加合并为第一反馈信号,第四探测信号、第五探测信号以及第六探测信号叠加合并为第二反馈信号。
73.控制电路10,还用于接收第一反馈信号以及第二反馈信号,并根据第一反馈信号以及第二反馈信号确定第一探测电路302的第一探测支路、第一探测电路302的第二探测支路、第二探测电路303的第一探测支路、第二探测电路303的第二探测支路、第三探测电路304的第一探测支路、第三探测电路304的第二探测支路的探测结果。
74.上述实施例中,通过将同一探测电路的探测支路用同一驱动信号进行驱动,将多个探测模块30的测试电路的第z探测支路的探测信号叠加合并为一反馈信号,最后控制电路10根据反馈信号确定n*m个探测支路中每一探测支路的探测结果。通过上述方案分时驱动探测支路进行检测,最后将检测信号叠加为一反馈信号,此时,由于每一测试电路中的测试支路的驱动信号输出端互相连接,且每一测试电路的第z探测支路的探测信号输出端均可以统一连接至一传输线,测试支路的驱动信号输出端以及每一测试电路的第z探测支路的探测信号输出端均不用单独连接至控制电路10也可以实现有效检测,极大的减少重复的电路设计单元,从而可以将电路尽可能简化,以解决多个超声波探头的电路方案连线较为复杂的技术问题。由于此时的信号叠加,对控制电路10能处理的数据量的要求以及对硬件接口的数量要求也会降低,从而可以降低硬件层面的预算以实现降低成本的目的。
75.为了实现上述目的,本发明还提出一种电子设备,电子设备包括如上的收发一体测距电路。
76.需要说明的是,由于本技术的电子设备包含上述收发一体测距电路的所有方案,因此,电子设备也可以实现收发一体测距电路的所有方案,并具有同样的有益效果,在此不再赘述。
77.可选地,电子设备还包括壳体,壳体具有相对设置的第一安装面以及第二安装面,每一对所述测试支路分设于所述第一安装面以及所述第二安装面。
78.在实际应用时,电子设备可以是小车,智能机器人等设备,此时第一安装面以及第二安装面可以为前后,左右,上下等任意一组方位,从而能实现有效且多方位测量。
79.可选地,所述电子设备还包括壳体,所述具有相对设置的第三安装面以及第四安装面,所述第三安装面与所述第一安装面相交设置,每一对所述测试支路分设于所述第一安装面、所述第二安装面、第三安装面以及第四安装面。
80.在实际应用时,电子设备可以是小车,智能机器人等设备,此时第一安装面以及第二安装面可以为前后,左右,上下等任意二组方位,从而能实现有效且多方位测量。
81.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。