1.本发明涉及通信技术领域,更具体地说,涉及一种应用于光纤预警系统与摄像机的分布式联动系统。
背景技术:
2.光纤预警系统项目现场监测范围较广,野外环境下工况复杂,出现告警后人员不能及时赶到现场复核告警情况,通过与摄像机联动,可以快速发现告警点周围环境,及时响应处理。常规的联动方式需要光纤预警系统需要划分多个防区,设定摄像机的预置位点匹配覆盖防区范围,当光纤预警系统触发告警时,系统平台通过摄像机的sdk调用预置位,来控制摄像机镜头(云台)转动到告警点所在的防区,防区的增多、镜头的覆盖范围都不能很好匹配,且需要人工进行繁琐的匹配映射工作,使之联动应用效果体验不佳。
技术实现要素:
3.1.要解决的技术问题针对现有技术中存在的问题,本发明的目的在于提供一种应用于光纤预警系统与摄像机的分布式联动系统,它可以实现通过告警点的位置信息来及时获取告警点有效的视频画面数据,同时向管理者及时呈现告警现场反馈情况。
4.2.技术方案为解决上述问题,本发明采用如下的技术方案。
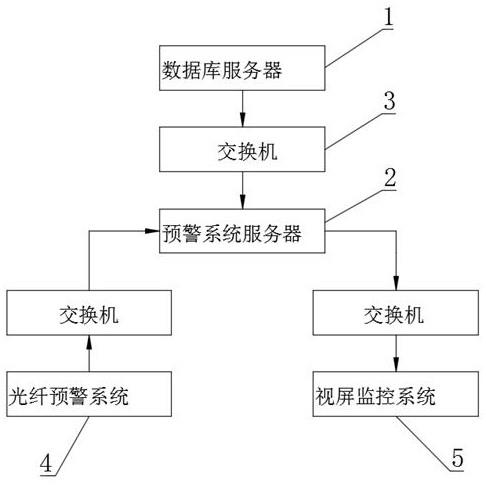
5.一种应用于光纤预警系统与摄像机的分布式联动系统,包括数据服务器、预警系统服务器、交换机以及光纤预警系统,所述光纤预警系统、所述视频监控系统和所述数据服务器均通过所述交换机与所述预警系统服务器通信连接,所述光纤预警系统用于监控光纤的实时状态,且在异常状态下进行告警,所述视频监控系统用于对所述光纤预警系统的周边情况进行监控。
6.进一步的,所述光纤预警系统在光纤分布区内均匀设置有多个告警点,且所述告警点均在所述视频监控系统的监控辐射范围内。
7.进一步的,所述视频监控系统包括联动摄像机ptz控制模块以及摄像机,所述联动摄像机ptz控制模块用于控制摄像机,所述摄像机通过设置有固定机构安装于监控立杆顶端。
8.进一步的,所述固定机构包括两个对称设置的安装扣环,所述安装扣环侧面中心固定焊接有固定支座,所述固定支座远离所述安装扣环一侧可拆卸安装有水平支杆,所述水平支杆端部安装有水平伺服电机,所述水平伺服电机动力输出端固定安装有水平转动支架,所述水平转动支架内部安装有垂直伺服电机,所述垂直伺服电机动力输出端固定安装有垂直转动支架,所述垂直转动支架转动连接于所述水平转动支架端部,所述摄像机安装于所述垂直转动支架顶面。
9.进一步的,所述安装扣环两端对称弯折形成有第一固定翼,所述第一固定翼中部
设置有螺纹圈,其中两个相对的所述螺纹圈之间螺纹连接有支撑螺栓,所述支撑螺栓顶端螺纹连接有连接支臂,所述连接支臂远离所述支撑螺栓一端固定焊接有限位扣环,所述限位扣环两端弯折形成有第二固定翼。
10.进一步的,所述第二固定翼与所述第一固定翼相互垂直交叉设置,所述第一固定翼在所述螺纹圈两侧对称设置有用于相互连接的螺钉孔。
11.进一步的,所述数据库服务器用于储存所述光纤预警系统告警点的位置信息数据和所述摄像机的位置信息数据。
12.进一步的,所述位置信息数据包括告警位置经纬度、摄像机位置经纬度、摄像机安装高度以及摄像机镜头指北偏差。
13.进一步的,所述预警系统服务器包括数据接收模块、摄像机水平角计算模块、摄像机仰角计算模块、摄像机镜头变倍计算模块以及数据输出模块,所述数据接收模块用于接收报警位置的所述光纤预警系统和所述摄像机的所有位置信息并分别传输至所述摄像机水平角计算模块、所述摄像机仰角计算模块和所述摄像机镜头变倍计算模块,所述摄像机水平角计算模块、所述摄像机仰角计算模块和所述摄像机镜头变倍计算模块分别用于根据已知数据计算出摄像机所需要改变的水平角度,垂直角度、以及镜头变倍数,所述数据输出模块用于整合数据计算结果并传输至所述联动摄像机ptz控制模块。
14.进一步的,所述联动摄像机ptz控制模块用于控制所述垂直伺服电机、所述水平伺服电机以及所述摄像机的镜头焦距变化倍数。
15.3.有益效果相比于现有技术,本发明的优点在于:(1)本方案可通过经纬度与摄像机进行分布式联动映射,摄像头数量降低,但拍摄范围更加契合告警点。
16.(2)本方案可通过光纤预警系统的告警点位置经纬度信息和摄像机的安装位置信息来计算摄像机姿态等参数的调节量,使摄像机快速精确定位到告警位置进行拍摄。
17.(2)本方案可通过与光纤预警系统的告警位置的相对距离和摄像机安装高度信息来计算联动告警点的镜头俯仰角和倍率的方法。
18.(3)本方案设置有安装扣环、螺纹圈、支撑螺栓、连接支臂和限位扣环相配合,可与监控立杆进行十字交叉的固定配合,使得摄像机的位置固定更加准确,不会在外界环境的影响下轻易改变位置,使得位置数据记录更加准确,进而使得数据计算结构更加准确,可准确的监控告警点位置。
附图说明
19.图1为本发明的系统结构示意图;图2为本发明的预警系统服务器结构示意图;图3为本发明的视频监控系统结构示意图;图4为本发明的计算流程结构示意图;图5为本发明的固定机构结构示意图;图6为本发明的局部爆炸图;图7为本发明的局部结构示意图。
20.图中标号说明:1、数据服务器;2、预警系统服务器;201、数据接收模块;202、摄像机水平角计算模块;203、摄像机仰角计算模块;204、摄像机镜头变倍计算模块;205、数据输出模块;3、交换机;4、光纤预警系统;5、视频监控系统;501、联动摄像机ptz控制模块;502、摄像机;6、垂直转动支架;7、水平转动支架;8、水平支杆;9、固定支座;10、安装扣环;11、垂直伺服电机;12、水平伺服电机;13、第一固定翼;14、螺纹圈;15、支撑螺栓;16、限位扣环;17、连接支臂;18、第二固定翼。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.实施例:请参阅图1-7,一种应用于光纤预警系统与摄像机的分布式联动系统,包括数据服务器1、预警系统服务器2、交换机3以及光纤预警系统4,光纤预警系统4、视频监控系统5和数据服务器1均通过交换机3与预警系统服务器2通信连接,光纤预警系统4用于监控光纤的实时状态,且在异常状态下进行告警,视频监控系统5用于对光纤预警系统4的周边情况进行监控。
23.参阅图1-4,其中,通过在光纤预警系统4在光纤分布区内均匀设置有多个告警点,可均匀的对光纤的各个区域进行监控,且告警点均在视频监控系统5的监控辐射范围内,可及时通过视频监控系统5对告警点进行监控。
24.参阅图3-7,视频监控系统包括联动摄像机ptz控制模块501以及摄像机502,联动摄像机ptz控制模块501用于控制摄像机502,摄像机502通过设置有固定机构安装于监控立杆顶端,同时一组控制摄像机502设置有两个,对称设置于监控立杆两侧,使得视频监控系统可360
°
对周边进行监控,避免出现视频监控死角。
25.参阅图5-7,固定机构包括两个对称设置的安装扣环10,安装扣环10侧面中心固定焊接有固定支座9,固定支座9远离安装扣环10一侧可拆卸安装有水平支杆8,水平支杆8端部安装有水平伺服电机12,水平伺服电机12动力输出端固定安装有水平转动支架7,水平转动支架7内部安装有垂直伺服电机11,垂直伺服电机11动力输出端固定安装有垂直转动支架6,垂直转动支架6转动连接于水平转动支架7端部,摄像机502安装于垂直转动支架6顶面,可利用垂直伺服电机11调节摄像机502垂直向的转动角,同时水平伺服电机12调节水平向的旋转角,进而可准确对准告警点位置。
26.参阅图5-7,其中,安装扣环10两端对称弯折形成有第一固定翼13,同时第一固定翼13中部设置有螺纹圈14,并且两个相对的螺纹圈14之间螺纹连接有支撑螺栓15,通过在支撑螺栓15顶端螺纹连接有连接支臂17,并在连接支臂17远离支撑螺栓15一端固定焊接有限位扣环16,且限位扣环16两端弯折形成有第二固定翼18,形成另一个与监控立杆相固定的结构。
27.参阅图5-7,其中,通过将第二固定翼18与第一固定翼13相互垂直交叉设置,同时
第一固定翼13在螺纹圈14两侧对称设置有用于相互连接的螺钉孔,可使得螺纹圈14与支撑螺栓15连接更加紧密,可使得安装扣环10与限位扣环16垂直交叉固定安装于监控立杆的顶部,使得摄像机502的位置固定更加准确,不会在外界环境的影响下轻易改变位置,使得位置数据记录更加准确。
28.参阅图1-4,数据库服务器用于储存光纤预警系统4告警点的位置信息数据和摄像机502的位置信息数据,其中,位置信息数据包括告警位置经纬度、摄像机502位置经纬度、摄像机502安装高度以及摄像机502镜头指北偏差,可通过这些数据来计算出摄像机502相对于告警点的方位角、俯仰角、倍率的变化量。
29.参阅图1-4,预警系统服务器2包括数据接收模块201、摄像机水平角计算模块202、摄像机仰角计算模块203、摄像机镜头变倍计算模块204以及数据输出模块205,数据接收模块201用于接收报警位置的光纤预警系统4和摄像机502的所有位置信息并分别传输至摄像机水平角计算模块202、摄像机仰角计算模块203和摄像机镜头变倍计算模块204,摄像机水平角计算模块202、摄像机仰角计算模块203和摄像机镜头变倍计算模块204分别用于根据已知数据计算出摄像机502所需要改变的水平角度,垂直角度、以及镜头变倍数,数据输出模块205用于整合数据计算结果并传输至联动摄像机ptz控制模块501。
30.参阅图2-7,其中,联动摄像机ptz控制模块501用于控制垂直伺服电机11、水平伺服电机12以及摄像机502的镜头焦距变化倍数,联动摄像机ptz控制模块501可根据计算得出的方位角、俯仰角、倍率的变化量来调节垂直伺服电机11、水平伺服电机12以及摄像机502的镜头焦距变化倍数。
31.工作原理:在光纤预警系统4内的告警点发出警报时,可及时通过交换机3将信号传输至预警系统服务器2,同时预警系统服务器2通过数据服务器1获取该告警位置内的摄像机502的位置信息以及告警点的位置;其次,可通过将告警点和摄像机502的位置经纬度信息转化为平面坐标,利用告警点与摄像机502安装位置的平面坐标计算告警点相对摄像机502的方位角和水平距离;通过摄像机502安装高度、摄像机502、告警点经纬度对应的海拔差、上一步算出的水平相对距离来计算摄像机502镜头的俯仰角、告警点到摄像机的三维距离;通过上一步算出的三维距离决定摄像机502的变焦放大倍率;确认摄像机502云台当前相较正北方向的水平转动角、俯仰角、放大倍率,或者初始化上述参数至预设值,如水平转动角恢复至0度正北方向;计算得出摄像机502方位角、俯仰角、倍率的变化量;最后,将计算得出的方位角、俯仰角、倍率的变化量传输至视频监控系统5,通过联动摄像机ptz控制模块501控制水平伺服电机12和垂直伺服电机11进行转动,使摄像机502的镜头对准告警点,进而对告警点周围画面进行拍摄,获取告警点有效的视频画面数据,同时向管理者及时呈现告警现场反馈情况。
32.以上所述,仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
