1.本技术属于扭矩传感器技术领域,具体涉及一种扭矩传感器装置、关节、机器人及形变量测量方法。
背景技术:
2.机器人关节扭矩传感器在测量时会受到关节中谐波减速器运转过程中转矩波动的影响,以及关节内部不同部件安装位置的误差带来的干扰。这些干扰会导致扭矩传感器在测量扭矩时出现误差,并影响机器人控制精度。
3.公开号为cn 106514720 a的中国发明专利,公开了用于关节模块的内嵌扭矩传感器及传感装置,其包括:传感器支架法兰;弹性体,一端粘接于柔轮圆周外表面,另一端粘接于支架上,用于将关节所承受的负载力矩对柔轮的剪切应变和波发生器对柔轮的挤压形变通过自身放大转变为弹性应变后传递给应变片;其中,柔轮在波发生器挤压下变形为椭圆;应变片,粘贴在弹性体上,组成桥式电路与信号处理电路连接,用于将弹性应变的机械信号转变为电压信号,发送给信号处理电路;信号处理电路,接收关节模块中的光电编码器在测量到柔轮的椭圆短轴经过支架时的指示信号,将接收到指示信号时接收的电压信号对应的负载电压值转换为负载力矩值。
4.公开号为cn 106737773 a的中国发明专利,公开了一种高精度关节力矩传感器,所述传感器包括力矩输入盘、力矩输出盘、四个应变梁和八个应变片,应变梁的两端分别与力矩输入盘的外缘和力矩输出盘的内缘固连为一体,四个应变梁沿力矩输入盘的圆周方向均匀分布。应变梁的不与力矩输入盘的端面平行的两个表面为其两个侧面,在应变梁的两个侧面上分别设置有一个应变片。第一和第二应变梁上的应变片构成第一全桥测量电路,第三和第四应变梁上的应变片构成第二全桥测量电路,在所述传感器检测关节输出力矩时,应变片的受力方向与传感器的旋转方向相切。
5.但是现有技术涉及的对扭矩传感器的结构,相对比较复杂或者需要对传感器本身的结构进行大幅改进,使得其使用场景也受到了一定的限制。
技术实现要素:
6.针对上述现有技术的缺点或不足,本技术要解决的技术问题是提供一种扭矩传感器装置、关节、机器人及形变量测量方法,本技术可吸收外部对扭矩传感器的倾斜力矩影响,降低扭矩传感器在非测量轴上受到的变形,从而提高扭矩传感器的精度。
7.为解决上述技术问题,本技术通过以下技术方案来实现:
8.本技术提出了一种扭矩传感器装置,包括:扭矩传感器、轴承以及关节适配器,在所述扭矩传感器的上下两侧安装有所述关节适配器,所述轴承沿周向安装在所述关节适配器的外侧。
9.可选地,上述的扭矩传感器装置,其中,所述轴承的设置数量为两个,在每个所述关节适配器的外侧均安装有所述轴承。
10.可选地,上述的扭矩传感器装置,其中,在所述关节适配器之间设有供所述扭矩传感器安装的凹槽结构。
11.可选地,上述的扭矩传感器装置,其中,所述凹槽结构为环形结构。
12.可选地,上述的扭矩传感器装置,其中,在所述关节适配器上设有若干个第一安装孔,在所述扭矩传感器上设有第二安装孔,所述第二安装孔与所述第一安装孔对应设置,通过安装件并依次穿过所述第一安装孔和所述第二安装孔以将所述关节适配器和所述扭矩传感器安装在一起。
13.可选地,上述的扭矩传感器装置,其中,所述第一安装孔沿周向均匀布设。
14.可选地,上述的扭矩传感器装置,其中,沿周向设置的所述第一安装孔可形成至少一圈的环形安装孔组。
15.可选地,上述的扭矩传感器装置,其中,不同圈的所述环形安装孔组具有同心以及不同的半径尺寸。
16.可选地,上述的扭矩传感器装置,其中,还包括:膜片,所述膜片设置在所述扭矩传感器以及所述关节适配器之间。
17.可选地,上述的扭矩传感器装置,其中,所述关节适配器上设有槽口。
18.可选地,上述的扭矩传感器装置,其中,在所述膜片的边缘位置还设有多个凹陷部。
19.可选地,上述的扭矩传感器装置,其中,在所述轴承的游隙没有被消除之前,所述扭矩传感器和所述膜片的形变量之和等于所述轴承的游隙大小。
20.可选地,上述的扭矩传感器装置,其中,在所述轴承的游隙被完全消除之后,所述扭矩传感器和所述膜片的形变量之和等于所述轴承滚珠的挤压形变量。
21.可选地,上述的扭矩传感器装置,其中,所述膜片为环形结构。
22.可选地,上述的扭矩传感器装置,其中,所述膜片上设有多个第三安装孔。
23.可选地,上述的扭矩传感器装置,其中,在所述扭矩传感器的两侧均设置有所述膜片。
24.可选地,上述的扭矩传感器装置,其中,所述膜片与所述扭矩传感器分体式连接。
25.可选地,上述的扭矩传感器装置,其中,所述膜片与所述扭矩传感器通过螺钉、销钉、焊接、胶粘、过盈配合或抱箍等方式连接。
26.可选地,上述的扭矩传感器装置,其中,所述膜片与所述扭矩传感器一体成型设置。
27.可选地,上述的扭矩传感器装置,其中,所述膜片采用不锈钢、铝合金、钛合金、树脂或塑料等材料制成。
28.可选地,上述的扭矩传感器装置,其中,所述扭矩传感器包括:接触式或非接触式扭矩传感器。
29.本技术另一方面还提出了扭矩传感器装置的形变量测量方法,设置膜片前后,采用所述扭矩传感器以及与磁铁的相对位移来测量所述扭矩传感器的形变量。
30.可选地,上述的形变量测量方法,其中,包括:设置z轴方向的作用力fz、xy方向上的作用力fxy、xy方向上的扭矩mxy以及xy方向上的弯曲扭矩warping mxy;测量所述磁铁相对所述扭矩传感器不同位置时,所述扭矩传感器在x轴、y轴、z轴方向上的形变量。
31.本技术另一方面还提出了关节,包括:所述的扭矩传感器装置。
32.本技术另一方面还提出了机器人,包括:所述的扭矩传感器装置或所述的关节。
33.与现有技术相比,本技术具有如下技术效果:
34.本技术可吸收外部对扭矩传感器的倾斜力矩影响,降低扭矩传感器在非测量轴上受到的变形,从而提高扭矩传感器的精度;
35.本技术还设置有膜片,使扭矩传感器在测量扭矩时尽可能排除所受到的谐波减速器或关节零部件带来的倾斜力矩的干扰;在扭矩测量方向上,膜片有极高的刚度,以串联的方式将外部的扭矩传递到所述扭矩传感器上,外部扭矩完全转化为所述扭矩传感器在测量方向上的变形,通过胡克定律,监测到此变形后转化为相应的力矩;而在非扭矩测量方向,膜片的刚度很低,倾斜力矩的干扰会被转化成膜片的变形,因此倾斜力矩导致的扭矩传感器的变形会减小数十倍,从而达到排除倾斜力矩干扰的作用。
附图说明
36.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
37.图1:本技术一实施例扭矩传感器装置的立体一;
38.图2:如图1所示结构的俯视图;
39.图3:如图2所示结构沿a-a的剖视图;
40.图4:本技术另一实施例扭矩传感器装置的分解示意图;
41.图5:本技术又一实施例扭矩传感器的俯视图;
42.图6:如图5所示结构沿a-a的剖视图;
43.图7:如图5所示结构的分解示意图;
44.图8:本技术一实施例扭矩传感器的测试点结构示意图。
具体实施方式
45.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
46.实施例一
47.如图1至图3所示,在本实施例中,一种扭矩传感器装置,包括:扭矩传感器30、轴承10以及关节适配器20,在所述扭矩传感器30的上下两侧安装有所述关节适配器20,所述轴承10沿周向安装在所述关节适配器20的外侧。本实施例可吸收外部对扭矩传感器30的倾斜力矩影响,降低扭矩传感器30在非测量轴上受到的变形,从而提高扭矩传感器30的精度。
48.所述扭矩传感器30包括:接触式或非接触式扭矩传感器。进一步地,所述扭矩传感器30包括但不限于:应变片式、电容式、光电式、磁电式或相位差式等扭矩传感器。
49.其中,在本实施例中,通过所述轴承10的设置,所述轴承10约束减小倾斜力矩对传感器的影响。外部倾斜力矩施加在关节上时,轴承10刚度极高,减小了扭矩传感器30的挠度,使得扭矩传感器30在倾斜力矩作用下的变形减小。其中,所述轴承10可用于下文所述的
关节。
50.如图3所示,优选地,所述轴承10的设置数量为两个,在每个所述关节适配器20的外侧均安装有所述轴承10。其中,两个所述轴承10内径和外径尺寸的并不做限定,其内径尺寸以能够适配所述关节适配器20的安装即可,其外径尺寸可以根据需要适配安装的关节的尺寸而定,适配度较高。本实施例优选地,两个所述轴承10的外径尺寸不同。
51.进一步优选地,在本实施例中,在所述关节适配器20之间设有供所述扭矩传感器30安装的凹槽结构21。该凹槽结构21用于更好地安装在所述扭矩传感器30,提高其安装稳定性,并且,所述凹槽结构21还可以对所述扭矩传感器30起到一定的保护作用。
52.进一步地,所述凹槽结构21为环形结构。
53.为了实现所述关节适配器20与所述扭矩传感器30的连接,在本实施例中,在所述关节适配器20上设有若干个第一安装孔201,在所述扭矩传感器30上设有第二安装孔301,所述第二安装孔301与所述第一安装孔201对应设置,通过安装件并依次穿过所述第一安装孔201和所述第二安装孔301以将所述关节适配器20和所述扭矩传感器30安装在一起。
54.其中,所述第一安装孔201和所述第二安装孔301的设置数量并不做限定,进一步优选地,所述第一安装孔201和所述第二安装孔301的设置数量为至少三个。
55.进一步地,所述第一安装孔201沿周向均匀布设。通过周向均匀布设,可提高所述关节适配器20和所述扭矩传感器30之间的连接稳定性。
56.其中,所述第一安装孔201和所述第二安装孔301可以采用通孔或螺纹孔结构,于此适配的,安装件采用销轴或螺栓结构。
57.进一步优选地,其中,上文所述第一安装孔201的布设方式可参考下文如图4或如图7所示的结构,具体地,沿周向设置的所述第一安装孔201可形成至少一圈的环形安装孔组。本实施例仅示意了所述第一安装孔201形成有两圈的环形安装孔组。具体应用时,本领域技术人员可以根据实际需要对所述环形安装孔组的设置数量进行适当地增减设置。
58.在本实施例中,不同圈的所述环形安装孔组具有同心以及不同的半径尺寸。通过上述设置,便于批量化加工生产,并且也利于更加快捷地实现所述关节适配器20与所述扭矩传感器30之前的对准安装。
59.实施例二
60.如图4所示,本实施例在上述实施例一的基础上还设有膜片40。具体地,一种扭矩传感器装置,包括:扭矩传感器30、轴承10、关节适配器20以及膜片40,所述轴承10沿周向安装在所述关节适配器20的外侧,所述膜片40设置在所述扭矩传感器30的上下两侧,在所述膜片40的外侧还设有所述关节适配器20。
61.其中,在本实施例中,通过所述轴承10的设置,所述轴承10约束减小倾斜力矩对传感器的影响。外部倾斜力矩施加在关节上时,轴承10刚度极高,减小了扭矩传感器30的挠度,使得扭矩传感器30在倾斜力矩作用下的变形减小。
62.本实施例在实施例一的基础上,继续添加膜片40,使扭矩传感器30在测量扭矩时尽可能排除所受到的谐波减速器或关节零部件带来的倾斜力矩的干扰;在扭矩测量方向上,膜片40有极高的刚度,以串联的方式将外部的扭矩传递到所述扭矩传感器30上,外部扭矩完全转化为所述扭矩传感器30在测量方向上的变形,通过胡克定律,监测到此变形后转化为相应的力矩;而在非扭矩测量方向,膜片40的刚度很低,倾斜力矩的干扰会被转化成膜
片40的变形,因此倾斜力矩导致的扭矩传感器30的变形会减小数十倍,从而达到排除倾斜力矩干扰的作用。
63.所述扭矩传感器30包括:接触式或非接触式扭矩传感器。进一步地,所述扭矩传感器30包括但不限于:应变片式、电容式、光电式、磁电式或相位差式等扭矩传感器。
64.如图4所示,优选地,所述轴承10的设置数量为两个,在每个所述关节适配器20的外侧均安装有所述轴承10。其中,两个所述轴承10内径和外径尺寸的并不做限定,其内径尺寸以能够适配所述关节适配器20的安装即可,其外径尺寸可以根据需要适配安装的关节的尺寸而定,适配度较高。本实施例优选地,两个所述轴承10的外径尺寸不同。
65.进一步优选地,在本实施例中,在所述关节适配器20之间设有供所述扭矩传感器30安装的凹槽结构21。该凹槽结构21用于更好地安装在所述扭矩传感器30,提高其安装稳定性,并且,所述凹槽结构21还可以对所述扭矩传感器30起到一定的保护作用。
66.进一步地,所述凹槽结构21为环形结构。
67.为了实现所述关节适配器20与所述扭矩传感器30的连接,在本实施例中,在所述关节适配器20上设有若干个第一安装孔201,在所述扭矩传感器30上设有第二安装孔301,所述第二安装孔301与所述第一安装孔201对应设置,通过安装件并依次穿过所述第一安装孔201和所述第二安装孔301以将所述关节适配器20和所述扭矩传感器30安装在一起,见图4所示。
68.其中,所述第一安装孔201和所述第二安装孔301的设置数量并不做限定,进一步优选地,所述第一安装孔201和所述第二安装孔301的设置数量为至少三个。
69.进一步地,所述第一安装孔201沿周向均匀布设。通过周向均匀布设,可提高所述关节适配器20和所述扭矩传感器30之间的连接稳定性。
70.其中,所述第一安装孔201和所述第二安装孔301可以采用通孔或螺纹孔结构,于此适配的,安装件采用销轴或螺栓结构。
71.进一步优选地,其中,上文所述第一安装孔201的布设方式可参考如图4所示的结构,具体地,沿周向设置的所述第一安装孔201可形成至少一圈的环形安装孔组。本实施例仅示意了所述第一安装孔201形成有两圈的环形安装孔组。具体应用时,本领域技术人员可以根据实际需要对所述环形安装孔组的设置数量进行适当地增减设置。
72.在本实施例中,不同圈的所述环形安装孔组具有同心以及不同的半径尺寸。通过上述设置,便于批量化加工生产,并且也利于更加快捷地实现所述关节适配器20与所述扭矩传感器30之前的对准安装。
73.进一步地,如图4所示,所述关节适配器20上设有槽口22。本实施例所述的关节适配器20的厚度相对上述实施例一的所述关节适配器20的厚度较薄一些。
74.在所述膜片40的边缘位置还设有多个凹陷部41,通过所述凹陷部41的设置,可进一步降低倾斜方向上的扭矩对所述扭矩传感器30的影响。
75.进一步地,在本实施例中,在所述轴承10的游隙没有被消除之前,所述扭矩传感器30和所述膜片40的形变量之和等于所述轴承10的游隙大小。此时,所述膜片40的变形量越大,即所述扭矩传感器30的变形越小。
76.在所述轴承10的游隙被完全消除之后,所述扭矩传感器30和所述膜片40的形变量之和等于所述轴承10滚珠的挤压形变量。同样的,所述膜片40的变形量越大,所述扭矩传感
器30的变形越小。谐波减速器柔轮带来的倾斜力矩导致的变形,同理也等于膜片40的变形与所述扭矩传感器30变形之和。
77.如图4所示,所述膜片40为环形结构。
78.所述膜片40上设有多个第三安装孔401。所述第三安装孔401用于安装使用,其中,所述第三安装孔401的设置数量并不做限定。
79.进一步优选地,在所述扭矩传感器30的两侧均设置有所述膜片40,通过上述设置能够更大程度地降低外部倾斜力对所述扭矩传感器30的影响。
80.其中,所述膜片40与所述扭矩传感器30分体式连接,见图4所示。
81.所述膜片40与所述扭矩传感器30通过螺钉、销钉、焊接、胶粘、过盈配合或抱箍等方式连接。上述连接方式仅为举例说明,并不对本技术的保护范围进行限定。
82.进一步优选地,所述膜片40采用不锈钢、铝合金、钛合金、树脂或塑料等材料制成。
83.实施例三
84.如图5至图7所示,本实施例与上述实施例二的区别在于,在本实施例中,所述膜片40与所述扭矩传感器30一体成型设置。上述一体成型式设置便于批量化地加工生产,在一定程度也能降低装置的故障发生率。
85.具体地技术方案参考如下:
86.一种扭矩传感器装置,包括:扭矩传感器30、轴承10、关节适配器20以及膜片40,所述轴承10沿周向安装在所述关节适配器20的外侧,所述膜片40设置在所述扭矩传感器30的上下两侧,在所述膜片40的外侧还设有所述关节适配器20。其中,通过所述轴承10的设置,所述轴承10约束减小倾斜力矩对传感器的影响。外部倾斜力矩施加在关节上时,轴承10刚度极高,减小了扭矩传感器30的挠度,使得扭矩传感器30在倾斜力矩作用下的变形减小。
87.本实施例通过上述膜片40的设置,使扭矩传感器30在测量扭矩时尽可能排除所受到的谐波减速器或关节零部件带来的倾斜力矩的干扰。在扭矩测量方向上,膜片40有极高的刚度,以串联的方式将外部的扭矩传递到所述扭矩传感器30上,外部扭矩完全转化为所述扭矩传感器30在测量方向上的变形,通过胡克定律,监测到此变形后转化为相应的力矩。而在非扭矩测量方向,膜片40的刚度很低,倾斜力矩的干扰会被转化成膜片40的变形,因此倾斜力矩导致的扭矩传感器30的变形会减小数十倍,从而达到排除倾斜力矩干扰的作用。
88.进一步优选地,所述轴承10的设置数量为两个,在每个所述关节适配器20的外侧均安装有所述轴承10。其中,两个所述轴承10内径和外径尺寸的并不做限定,其内径尺寸以能够适配所述关节适配器20的安装即可,其外径尺寸可以根据需要适配安装的关节的尺寸而定,适配度较高。本实施例优选地,两个所述轴承10的外径尺寸不同。
89.进一步优选地,在本实施例中,在所述关节适配器20之间设有供所述扭矩传感器30安装的凹槽结构21。该凹槽结构21用于更好地安装在所述扭矩传感器30,提高其安装稳定性,并且,所述凹槽结构21还可以对所述扭矩传感器30起到一定的保护作用。
90.进一步地,所述凹槽结构21为环形结构。
91.为了实现所述关节适配器20与所述扭矩传感器30的连接,在本实施例中,在所述关节适配器20上设有若干个第一安装孔201,在所述扭矩传感器30上设有第二安装孔301,所述第二安装孔301与所述第一安装孔201对应设置,通过安装件并依次穿过所述第一安装孔201和所述第二安装孔301以将所述关节适配器20和所述扭矩传感器30安装在一起,如图
7所示。
92.其中,所述第一安装孔201和所述第二安装孔301的设置数量并不做限定,进一步优选地,所述第一安装孔201和所述第二安装孔301的设置数量为至少三个。
93.进一步地,所述第一安装孔201沿周向均匀布设。通过周向均匀布设,可提高所述关节适配器20和所述扭矩传感器30之间的连接稳定性。
94.其中,所述第一安装孔201和所述第二安装孔301可以采用通孔或螺纹孔结构,于此适配的,安装件采用销轴或螺栓结构。
95.上文所述第一安装孔201的布设方式可参考如图7所示的结构,具体地,沿周向设置的所述第一安装孔201可形成至少一圈的环形安装孔组。本实施例仅示意了所述第一安装孔201形成有两圈的环形安装孔组。具体应用时,本领域技术人员可以根据实际需要对所述环形安装孔组的设置数量进行适当地增减设置。
96.在本实施例中,不同圈的所述环形安装孔组具有同心以及不同的半径尺寸。通过上述设置,便于批量化加工生产,并且也利于更加快捷地实现所述关节适配器20与所述扭矩传感器30之前的对准安装。
97.进一步优选地,所述关节适配器20上设有槽口22。本实施例所述的关节适配器20的厚度相对上述实施例一的所述关节适配器20的厚度较薄一些。
98.在所述膜片40的边缘位置还设有多个凹陷部41,通过所述凹陷部41的设置,可进一步降低倾斜方向上的扭矩对所述扭矩传感器30的影响。
99.进一步地,在本实施例中,在所述轴承10的游隙没有被消除之前,所述扭矩传感器30和所述膜片40的形变量之和等于所述轴承10的游隙大小。此时,所述膜片40的变形量越大,即所述扭矩传感器30的变形越小。
100.在所述轴承10的游隙被完全消除之后,所述扭矩传感器30和所述膜片40的形变量之和等于所述轴承10滚珠的挤压形变量。同样的,所述膜片40的变形量越大,所述扭矩传感器30的变形越小。谐波减速器柔轮带来的倾斜力矩导致的变形,同理也等于膜片40的变形与所述扭矩传感器30变形之和。
101.如图4所示,所述膜片40为环形结构。
102.所述膜片40上设有多个第三安装孔401。所述第三安装孔401用于安装使用,其中,所述第三安装孔401的设置数量并不做限定。
103.进一步优选地,在所述扭矩传感器30的两侧均设置有所述膜片40,通过上述设置能够更大程度地降低外部倾斜力对所述扭矩传感器30的影响。
104.在本实施例中,所述膜片40采用不锈钢、铝合金、钛合金、树脂或塑料等材料制成。
105.本技术另一方面还提出了扭矩传感器装置的形变量测量方法,设置膜片40前后,采用所述扭矩传感器30以及与磁铁的相对位移来测量所述扭矩传感器30的形变量。
106.具体地,在本实施例中,通过solidworks simulation比较是否存在膜片40对扭矩传感器30的影响,通过如图8所示测量扭矩传感器30和磁铁的相对位移来比较膜片40对传感器的帮助。其中,所述扭矩传感器30采用霍尔传感器进行示意说明。其中,图中的编号1和编号2代表磁铁的不同放置位置。如图8所示的m表示芯片的安装位置。
107.具体地,上述形变量测量方法包括:设置z轴方向的作用力fz、xy方向上的作用力fxy、xy方向上的扭矩mxy以及xy方向上的弯曲扭矩warping mxy;测量所述磁铁相对所述扭
矩传感器30不同位置时,所述扭矩传感器30在x轴、y轴、z轴方向上的形变量。其中,上述的xy方向指的是沿x轴倾斜45
°
所示的方向。
108.其中,添加膜片40前后,所述扭矩传感器30的形变量的测量结果如下表1和表2所示,
109.表1不带膜片40的扭矩传感器30的形变量仿真结果
[0110][0111]
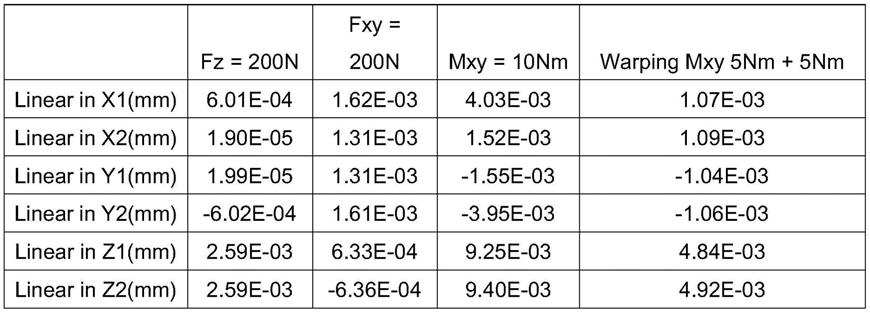
表2带有膜片40的扭矩传感器30的形变量仿真结果
[0112][0113][0114]
其中,上述的x1、y1、z1表示第一磁铁在如图8所示的位置时,所述扭矩传感器30在x、y、z轴方向上的形变量;上述的x2、y2、z2表示第二磁铁在如图8所示的位置时,所述扭矩传感器30在x、y、z轴方向上的形变量。并且,从上述表1和表2对比可知,添加膜片40之后,所述扭矩传感器30的形变量明显小于未添加膜片40的传感器装置。
[0115]
一般的扭矩传感器30在测量扭矩时会受到倾斜力矩的干扰而变形,随着变形的增大,扭矩读数误差会相应增大。因此,在本实施例中,在添加了膜片40之后,膜片40在倾斜力矩作用下的变形会是扭矩传感器30的几十倍,亦即原先倾斜力矩对传感器的干扰绝大部分会被膜片40吸收,从而扭矩传感器30的精度会得到提高。
[0116]
本技术另一方面还提出了关节,包括:所述的扭矩传感器装置。
[0117]
本实施例中的扭矩传感器装置可应用于关节使用,用于检测关节的扭矩力。其中,涉及的扭矩传感器装置的技术特征见上文描述,这里不再赘述。
[0118]
本技术另一方面还提出了机器人,包括:所述的扭矩传感器装置或所述的关节。
[0119]
本实施例扭矩传感器装置或者上述的关节可应用于机器人使用,其中,涉及的涉及的扭矩传感器装置的技术特征见上文描述,这里不再赘述。
[0120]
本技术可吸收外部对扭矩传感器30的倾斜力矩影响,降低扭矩传感器30在非测量轴上受到的变形,从而提高扭矩传感器30的精度;本技术还设置有膜片40,使扭矩传感器30在测量扭矩时尽可能排除所受到的谐波减速器或关节零部件带来的倾斜力矩的干扰;在扭矩测量方向上,膜片40有极高的刚度,以串联的方式将外部的扭矩传递到所述扭矩传感器30上,外部扭矩完全转化为所述扭矩传感器30在测量方向上的变形,通过胡克定律,监测到此变形后转化为相应的力矩;而在非扭矩测量方向,膜片40的刚度很低,倾斜力矩的干扰会被转化成膜片40的变形,因此倾斜力矩导致的扭矩传感器30的变形会减小数十倍,从而达到排除倾斜力矩干扰的作用。因此,本技术具有良好的市场应用前景。
[0121]
在本技术的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
[0122]
在本技术中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0123]
在本实施例的描述中,术语“上”、“下”、“左”、“右”、等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
[0124]
以上实施例仅用以说明本技术的技术方案而非限定,参照较佳实施例对本技术进行了详细说明。本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或等同替换,而不脱离本技术技术方案的精神和范围,均应涵盖在本技术的权利要求范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
