1.本发明涉及半导体技术领域,尤其涉及一种晶圆处理工序、校准装置和对准方法。
背景技术:
2.半导体制造工艺中,很多工艺需要预先将晶圆准确放置和定位,然后进入下一工序进行处理,且在很多工艺中需要将晶圆加热到所需的处理温度,在工艺过程进行前,将晶圆加热到所需的处理温度需要一定的加热时间,加热期间无法进行工艺处理,占用了一定的晶圆加工时间和晶圆处理工序效率。如在晶圆预处理工序中,首先进行晶圆镀膜,需要在晶圆表面涂上光阻薄膜,光阻薄膜充当刻蚀或者离子注入的掩膜;然后对晶圆光刻显影、蚀刻,使用紫外光通过光罩和凸透镜后照射到晶圆涂膜上,使其软化,然后使用溶剂将其溶解冲走,使薄膜下的硅暴露出来;最后进行离子注入,使用刻蚀机在裸露出的硅上刻蚀出n阱和p阱,并注入离子,形成pn结(逻辑闸门),然后通过化学和物理气象沉淀做出上层金属连接电路。现有技术中针对晶圆处理工序,先将涂膜后的晶圆在对准室内进行校准定位,然后再将晶圆移动到工艺处理室内进行加热去除光阻,在对晶圆进行刻蚀灰化工艺时,晶圆温度要达到200℃~250℃,每片晶圆都会需要花费15~20秒的加热时间。
技术实现要素:
3.鉴于上述的分析,本发明实施例旨在提供一种晶圆处理工序、校准装置和对准方法,用以解决现有晶圆处理工序中对准室仅能校准定位而造成的晶圆处理工序效率低的问题。
4.一方面,本发明提供了一种晶圆处理工序,步骤包括:
5.s1:晶圆在对准室内校准定位的同时加热到温度t1;
6.s2:将加热到t1温度的晶圆送入工艺处理室继续加热到温度t2;
7.s3:对加热到t2温度的晶圆进行后续处理,完成晶圆处理工序;
8.其中,t1《t2。
9.进一步地,所述步骤s1中,所述温度t1为50℃~150℃。
10.进一步地,所述步骤s2中,所述温度t2为200℃~600℃。
11.另一方面,本发明提供了一种晶圆校准装置,用于上述的晶圆处理工艺,包括卡盘、移动组件、旋转组件和加热单元,移动组件用于晶圆在竖直和水平方向上的移动,旋转组件用于带动卡盘旋转,加热单元用于加热晶圆。
12.进一步地,所述晶圆设在卡盘的上方,所述移动组件设在卡盘的侧面,所述旋转组件与卡盘的下端连接,所述加热单元设在卡盘上。
13.进一步地,所述加热单元为金属插入类、外套类、热线类和热电素子中的一种或多种。
14.进一步地,所述卡盘为圆盘形结构,所述卡盘内设有空腔,所述加热单元设在空腔内。
15.进一步地,所述加热单元套设在卡盘的圆柱面和底面上。
16.进一步地,所述卡盘的顶面设有多个感应部件,多个感应部件沿所述晶圆的边缘均布,且多个感应部件所在内切圆的直径等于所述晶圆的直径。
17.进一步地,所述卡盘的空腔内设有冷却管,冷却管内流过冷却介质用于冷却晶圆。
18.进一步地,所述卡盘的上表面开设有凹槽,凹槽内设有温度传感器。
19.进一步地,所述移动组件包括第一移动部、第二移动部和第三移动部,第一移动部用于夹持所述晶圆,第二移动部用于带动第一移动部在水平方向上移动,第三移动部用于带动第二移动部沿竖直方向移动。
20.进一步地,晶圆校准装置还包括检测单元和控制单元,检测单元用于摄取所述晶圆的图像,并传递给控制单元,控制单元用于比对检测单元获得的图像中对准标记位置与要求的对准标记位置圆心角差值,并控制所述移动组件和旋转组件的运行。
21.另一方面,本发明提供了一种晶圆对准方法,使用上述的晶圆校准装置,步骤包括:
22.s101:将晶圆放置在卡盘上;
23.s102:旋转组件转动的同时,加热单元开启,对准并加热晶圆。
24.与现有技术相比,本发明至少可实现如下有益效果之一:
25.(1)晶圆在对准室内加热至50℃~150℃,再移动至工艺处理室继续加热至200℃~600℃,使晶圆在工艺处理室内的加热时间由15~20s减少至5~10s,提高了晶圆处理工序效率;
26.(2)对准室的卡盘上安装加热单元,进行晶圆校准定位的同时进行晶圆加热,使得晶圆在移动工艺处理室前先加热到一定的温度,节省了在工艺处理室内的加热时间;
27.(3)感应部件嵌设于卡盘的顶面,多个感应部件沿晶圆的边缘均布,且多个感应部件所在内切圆的直径等于晶圆的直径,使得晶圆在放正的情况下刚好覆盖所有感应部件,感应部件用于感应晶圆数据,避免晶圆放置到卡盘上发生偏置。
28.本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
29.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
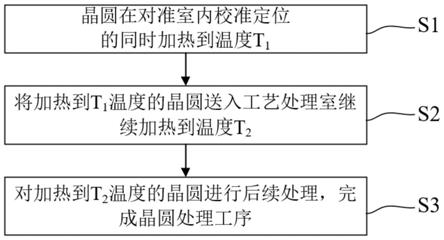
30.图1为具体实施例1的晶圆处理工序流程图;
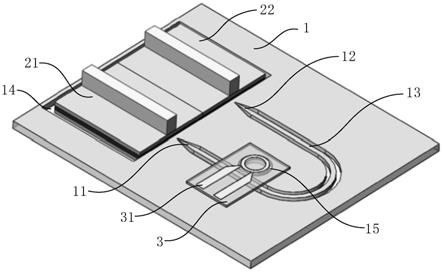
31.图2为具体实施例2的晶圆校准装置示意图;
32.图3为具体实施例3的晶圆对准方法流程图。
33.附图标记:
34.1-晶圆;2-卡盘;3-移动组件;4-旋转组件;5-加热单元;6-检测单元;7-控制单元。
具体实施方式
35.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本发明一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
36.在本发明实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
37.全文中描述使用的术语“顶部”、“底部”、“在
……
上方”、“下”和“在
……
上”是相对于装置的部件的相对位置,例如装置内部的顶部和底部衬底的相对位置。可以理解的是装置是多功能的,与它们在空间中的方位无关。
38.实施例1
39.本发明的一个具体实施例,公开了一种晶圆处理工序,如图1所示,步骤包括:
40.s1:晶圆在对准室内校准定位的同时加热到温度t1;
41.s2:将加热到t1温度的晶圆送入工艺处理室继续加热到温度t2;
42.s3:对加热到t2温度的晶圆进行后续处理,完成晶圆处理工序。
43.实施时,先将晶圆在对准室内加热到温度t1,再将晶圆送入工艺处理室内加热到温度t2,最后再进行后续工艺处理,在对准室内晶圆校准定位和加热同时进行,能够节省时间,提高了晶圆处理工序的效率,有利于企业的生成提速。
44.与现有技术相比,本实施例提供的晶圆处理工序在晶圆移动到工艺处理室前先在对准室内对晶圆校准定位的同时进行加热,然后移动到工艺处理室内继续加热到要求温度,减少了晶圆在工艺处理室内加热的时间,提高了晶圆工艺处理效率。
45.s1:晶圆在对准室内校准定位的同时加热到温度t1。
46.首先将晶圆从装载模块如晶圆传送盒上移动到对准室内,然后进行校准定位和加热操作,将晶圆加热到50℃~150℃,即温度t1,此步骤中在对准室内校准定位晶圆的同时并对晶圆进行加热,使得晶圆在移动到工艺处理室前就加热到了一定的温度,相对于在对准室内只进行校准定位操作,晶圆移动到工艺处理室内再进行加热的传动处理工艺,将晶圆加热分为两步进行,利用了晶圆在对准室内校准定位的时间,避免了仅在工艺处理室内加热的时间浪费,使得晶圆处理工序更加紧凑,有益于企业的生产提速。
47.s2:将加热到t1的晶圆送入工艺处理室继续加热到温度t2。
48.将加热到50℃~150℃的晶圆移动到工艺处理室内,继续进行加热至工艺处理温度,如200~600℃,即温度t2,达到温度要求,根据具体的工艺要求确定工艺处理温度,由于在步骤s1中已将晶圆加热到50℃~150℃,晶圆送到工艺处理室内无需从晶圆原始温度进行升温,节省了加热至t1温度所用的时间,使晶圆在工艺处理室内的加热时间由15~20s减少至5~10s,提高了晶圆处理工序效率。
49.s3:对加热到t2温度的晶圆进行后续处理,完成晶圆处理工序。
50.此步骤中对晶圆的后续处理为一系列常规操作,如离子注入、化学和物理气相沉积等操作。
51.实施例2
52.本发明的另一个具体实施例,公开了一种晶圆校准装置,晶圆校准装置设置在对
准室内,如图2所示,用于实施例1中的晶圆处理工序中,包括卡盘2、移动组件3、旋转组件4和加热单元5,晶圆1放置在卡盘2的上方,移动组件3设在卡盘2的侧面,旋转组件4与卡盘2的下端连接,加热单元5设在卡盘2上,移动组件3用于晶圆1在竖直和水平方向上的移动,旋转组件4用于带动卡盘2在水平方向上的旋转,加热单元5用于加热晶圆1。
53.与现有技术相比,本实施例提出的晶圆校准装置在卡盘上设有加热单元,加热单元用于晶圆的加热,晶圆校准装置既能够进行晶圆的校准定位,又能够进行晶圆的加热,且校准定位和加热能够同时进行,克服了校准装置仅进行校准定位的偏见,由于晶圆在校准定位的同时能够进行加热,利用了校准定位的时间,提高了时间利用率,同时节省了后续晶圆的加热的时间,提高了晶圆的处理效率。
54.考虑到晶圆1的对准过程中需要参照基准,因此晶圆1上设有对准标记,对准标记设在晶圆1的边缘,即在晶圆1的圆周上开槽,本实施例中,在晶圆1的边缘上开设“v”形槽或者“丨”形槽,作为晶圆1上对准时的参照基准。
55.考虑到晶圆1放到卡盘2上可能出现偏置的情况,卡盘2的顶面边缘设有感应部件,感应部件与控制单元7连接,并将感应的数据传输给控制单元7,控制单元7将感应部件传输的数据与晶圆1放正状态下的数据对比,若晶圆1发生偏置,则向移动组件3发出命令对晶圆1的位置进行调整。
56.具体而言,感应部件嵌设于卡盘2的顶面,避免划伤晶圆1的表面,感应部件用于感应晶圆1放置于卡盘2上的瞬间的数据。在一种可能的实施方式中,感应部件为压力传感器。通过晶圆1放置于卡盘2上的瞬间压力传感器的测量值变化来反映晶圆是否偏置。感应部件的数量为多个,并沿晶圆1的边缘均布,且多个感应部件所在内切圆的直径等于晶圆1的直径,即晶圆1在放正的情况下刚好覆盖所有感应部件。示例性地,感应部件为四个。
57.值得注意的是,当感应部件为压力传感器时,压力传感器与物体接触才能测得数据,为了避免晶圆1的表面被压力传感器损坏,因此,压力传感器的顶部低于晶圆1的上表面,在压力传感器的顶部设有与卡盘2材料一致的垫块,垫块放置到压力传感器的顶部后,垫块的顶面与卡盘2的顶面齐平。
58.当将晶圆1放于卡盘2上时,如果所有的压力传感器感应到的压力与晶圆1放正状态下的压力值一致,则表明晶圆1未偏置;如果一个或者多个温度传感器感应到的压力出现变化(与要求值不一致),则表明晶圆1偏置,需要调整晶圆1的位置。
59.卡盘2为圆盘形结构,卡盘2内设有空腔,加热单元5设在空腔内,加热单元5能够加热卡盘2进而加热卡盘2上表面放置的晶圆1,使得晶圆1的温度能够达到50℃~150℃。
60.在一种可能的实施方式中,加热单元5的形式可以为金属插入类、外套类、热线类和热电素子中的一种或多种,当加热单元5为金属插入类、热线类和热电素子时,加热单元5设在卡盘2的空腔内,当加热单元5为外套类时,加热单元5包裹卡盘2的圆柱面和底面。
61.本实施例中,晶圆1在卡盘2内的加热单元5的作用下能够预先获得一个温度t1,为后续在工艺处理室内继续加热晶圆1预设了温度基础,使得后续加热晶圆1不在从晶圆1的原始温度加热,节省了后续加热时间,使得整个晶圆处理工序紧凑高效,有利于企业的生产提速。
62.为了避免晶圆1在加热过程中超过适当温度范围200℃~600℃,如晶圆进行刻蚀灰化工艺前的对准准备,温度范围为200℃~250,即温度t2,卡盘2的空腔内设有冷却管,冷
却管内流过冷却介质,以防止晶圆1过热超出要求的适当温度范围。流过冷却管的冷却介质能够冷却卡盘2,使得卡盘2保持在适当的温度范围。因此,能够保持晶圆1在卡盘2上具有合适的温度范围(本实施例的50℃~150℃)。
63.考虑到要确保卡盘2上的晶圆1要加热到合适的温度范围,因而卡盘2上设有温度传感器,具体地,温度传感器设在卡盘2的上表面,为了避免温度传感器损坏晶圆1,卡盘2的上表面开设有凹槽,温度传感器设在凹槽内。
64.为了进一步控制卡盘2的加热温度,进而更精确控制卡盘2上的晶圆1的加热温度在合适的范围,卡盘2的凹槽设有多个,多个凹槽均匀间隔开设在卡盘2的上表面,多个温度传感器对应设有凹槽内。
65.本实施例中,在卡盘2的上表面开设多个均布的凹槽,凹槽内设有温度传感器,既能够测量卡盘2的温度,进而控制晶圆1的加热温度,又能避免对晶圆1的损伤;同时,卡盘2内设有的冷却管能够对卡盘2降温,避免晶圆1过热而破坏晶圆1的结构。
66.移动组件3能够带动晶圆1在竖直和水平方向上移动,以便调整晶圆1的位置和转移晶圆1。移动组件3包括第一移动部、第二移动部和第三移动部,第一移动部用于夹持晶圆1,第二移动部用于带动第一移动部在水平方向上移动,第三移动部用于带动第二移动部沿竖直方向移动,进而能够实现晶圆1在水平和竖直方向上的移动。
67.具体而言,第一移动部包括气缸和夹持爪,气缸的一端与第二移动部的第一滑块连接,夹持爪的一端与气缸的活塞杆连接,夹持爪的另一端开设有圆弧槽,圆弧槽与晶圆1配合,当需要对晶圆1夹持时,对气缸供气,夹持爪在活塞杆的带动架夹持晶圆1。
68.需要说明的是,移动组件3设有一对,对称布设在晶圆的两侧,以便对晶圆1进行夹持。
69.考虑到气缸的动作可能会损坏晶圆1,在圆环槽的内壁上间隔设有弹性条,利用弹性条的缓冲作用减缓气缸供气时对晶圆1的边缘造成的影响。
70.第二移动部包括第一电机、第一导轨、第一丝杠和第一滑块,第一导轨水平设置,第一导轨的底面与第三移动部的第二滑块连接,第一电机与第一丝杠连接,第一丝杠通过轴承与第一导轨连接,且第一丝杠的一端连接到第一电机上,第一滑块在于第一丝杠连接,在第一电机的带动下,第一滑块沿第一滑轨直线移动。需要说明的是,为了使第一滑块在第一导轨上稳定滑动,第一滑块的下底面设有第一t形部,第一t形部与第一导轨上开设的第一t形槽配合。
71.需要说明的是,第一移动部在第二移动部上的移动方向与气缸的活塞杆的移动方向垂直。
72.第三移动部包括第二电机、第二导轨、第二丝杠和第二滑块,第二导轨竖直设置,第二电机设置第二导轨的上端,第二电机与第二丝杠连接,第二丝杠通过轴承与第二导轨连接,且第二丝杠的二端连接到第二电机上,第二滑块在于第二丝杠连接,在第二电机的带动下,第二滑块沿第二滑轨直线移动。需要说明的是,为了使第二滑块在第二导轨上稳定滑动,第二滑块的下底面设有第二t形部,第二t形部与第二导轨上开设的第二t形槽配合。
73.本实施例中,通过第一移动部、第二移动部和第三移动部的配合能够实现晶圆1在水平和竖直方向上的移动,可以将晶圆1从装载模块移动到卡盘2的上方,并放到卡盘2上,当晶圆1对正后,再通过移动组件3将晶圆1从卡盘2上移走。
74.由于对晶圆1的工艺处理时,需要晶圆1保持一个特定的位置,因而需要对晶圆1进行对准,使用旋转组件4转动卡盘2,进而带动晶圆1转动,使晶圆1上的对准标记位于要求位置。
75.旋转组件4包括第三电机、连接轴和支撑座,连接轴的一端与卡盘2的底面连接,连接轴的另一端与第三电机的输出轴连接,通过轴承将连接轴设在支撑座内,且支撑座的顶面不与卡盘2的底面接触,第三电机设在支撑座的底部内,第三电机旋转带动卡盘2旋转。
76.为了检测对准标注的位置,晶圆校准装置还包括检测单元6和控制单元7,检测单元6位于卡盘2的侧方,检测单元6用于摄取晶圆1的图像,并传递给控制单元7,控制单元7比对检测单元6获得的图像中对准标记位置与要求的对准标记位置圆心角差值,控制第三电机转动,使得对准标注转动到要求位置。
77.需要说明的是,控制单元7还控制第一电机、第二电机的启动与停止,气缸的运动以及加热单元5、与冷却管供应冷却物质的储冷罐的开启和关闭,同时与温度传感器电连接。
78.实施例3
79.本发明的另一个具体实施例,公开了一种晶圆对准方法,如图3所示,使用实施例2的晶圆校准装置,步骤包括:
80.s101:将晶圆1放置在卡盘2上。
81.第一移动组件的气缸供气夹持晶圆1,第二电机转动带动晶圆1沿竖直方向运动,第二电机停止,第一电机转动带动晶圆1沿水平方向运动到卡盘2的上方,第一电机停转,第二电机反转带动晶圆1放置到卡盘2上,同时气缸停止供气,夹持爪远离晶圆1。
82.s102:旋转组件4转动的同时,加热单元5开启,对准并加热晶圆1。
83.启动加热单元5的同时,检测单元6用于摄取晶圆1的图像,并传递给控制单元7,控制单元7比对检测单元6获得的图像中对准标记位置与要求的对准标记位置圆心角差值,控制第三电机转动,使得对准标注转动到要求位置。
84.需要说明的是,在加热单元5对晶圆1进行加热的过程中,控制单元7获取温度传感器测得的卡盘2的温度,用于检测晶圆1的温度值,使其加热至合适的温度范围。
85.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。