技术特征:
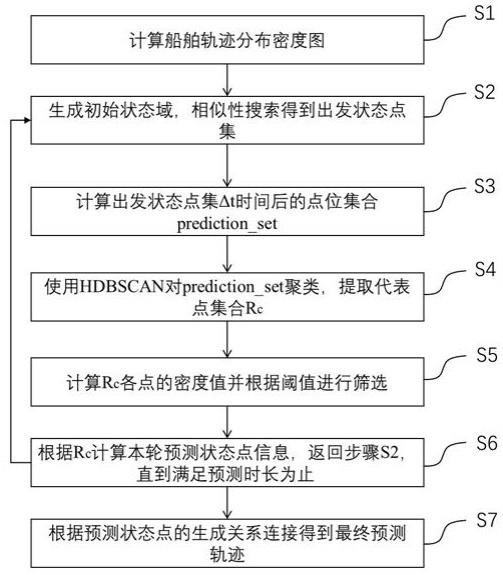
1.一种长期船舶轨迹预测方法,其特征在于,包括如下步骤:s1、将预测水域空间按照规则网格进行划分,在网格化基础上计算船舶轨迹分布密度图;s2、由待预测船舶初始状态点生成初始状态域,在初始状态域内利用相似性搜索得到出发状态点集;s3、计算出发状态点集δt时间后的点位集合prediction_set;s4、使用密度聚类算法对prediction_set聚类,提取聚类结果主要集群并计算代表点,得到代表点集合r
c
;s5、计算r
c
各点在船舶轨迹分布密度图对应的密度值,如果低于设定的密度阈值,则将该点从r
c
中去除;s6、根据r
c
计算本轮预测状态点信息,再将其作为输入返回步骤s2,重复s2~s6,直到满足预测时长为止;s7、从最后一轮计算得到的预测状态点逐轮向上,根据预测状态点的生成关系连接得到最终预测轨迹。2.根据权利要求1所述一种长期轨迹预测方法,其特征在于,所述步骤s1包括:s11、确定待预测水域空间范围,将其按照经纬网进行网格划分,网格边长取5
×
10-5
度;s12、使用线密度估计方法计算轨迹密度分布:将历史ais轨迹线集合叠加至网格,计算落入每个网格中的轨迹线数量n及其相交长度l
i
,得到网格值;s13、对网格值进行全局归一化处理,使其值域控制在[0, 1]区间内,形成最终船舶轨迹分布密度图。3.根据权利要求1所述一种长期轨迹预测方法,其特征在于,所述步骤s2包括:s21、确定待预测船舶的初始状态点,所述初始状态点包含海上移动业务识别码、瞬时位置、对地航速、对地航向和时间戳;s22、由待预测船舶初始状态点生成出发线,所述出发线的中点为初始状态点的位置坐标,所述出发线的角度与初始状态点对地航向保持垂直;s23、计算初始状态域,所述初始状态域由出发线生成的缓冲区构成,缓冲区计算方法为单线定距缓冲;s24、对初始状态域内历史ais轨迹点进行相似性搜索得到出发状态点集;s24、如果出发状态点集中存在多个具有相同mmsi值的元素,则保留其中与出发线垂直距离最近的一个元素。4.根据权利要求3所述一种长期轨迹预测方法,其特征在于,所述步骤s2中初始状态域由出发线生成的缓冲区构成;所述出发线由待预测船舶初始状态点生成,出发线中点为初始状态点的位置坐标,出发线角度与初始状态点对地航向保持垂直;所述缓冲区由出发线单线定距缓冲生成。5.根据权利要求3所述一种长期轨迹预测方法,其特征在于,所述步骤s24中相似性搜索采用下式计算:
其中,sog
s
表示初始状态点航速,sog
i
为搜索点航速,γ为航速阈值,cog
s
表示初始状态点航向,cog
i
为搜索点航向,λ为航向阈值,t
s
表示初始状态点时间戳,t
i
为搜索点时间戳,τ为时间阈值。6.根据权利要求5所述一种长期轨迹预测方法,其特征在于,所述出发线长度为100米,缓冲值取值为50米,γ取值为1节,λ取值为30度,τ取值为10天。7.根据权利要求1所述一种长期轨迹预测方法,其特征在于,所述步骤s3中δt时间后的位置由出发状态点所在的实际ais轨迹以线性内插方式计算得到,如果在某一时刻无法定位到前、后采样,则判定该时刻已超过实际ais轨迹时间范围,直接舍弃该点。8.根据权利要求1所述一种长期轨迹预测方法,其特征在于,所述步骤s4中主要集群是指聚类结果中除了离群点外,元素数量占总数量超出预设比值的集群;所述代表点是指主要集群中距离中心点坐标最近的元素,所述中心点由主要集群中所有元素平均坐标计算得到。9. 根据权利要求1所述一种长期轨迹预测方法,其特征在于,所述步骤s5中密度阈值的选择区间设定如下: 对于单条常见航行规律的轨迹预测,密度阈值区间为[0.2,0.5];对于存在支汊航道航行的轨迹预测,密度阈值区间为[0.1,0.2];对于更多行为模式的轨迹预测,密度阈值区间为[0.05, 0.1]。10. 根据权利要求1所述一种长期轨迹预测方法,其特征在于,所述步骤s6中预测状态点信息包括位置坐标、航向及航速信息;其中预测状态点位置坐标为r
c
中各点的坐标,预测状态点航向为r
c
中各点与上一轮预测状态点坐标形成的向量角度,极坐标轴正方向为正北,值域范围在[0
°
, 360
°
];预测状态点航速由r
c
中各点与上一轮预测状态点之间的距离d/δt计算得到,其中d为两点间的haversine距离。
技术总结
本发明公开了一种长期船舶轨迹预测方法,包括:S1、将预测水域空间按照规则网格进行划分,计算船舶轨迹分布密度图;S2、由待预测船舶初始状态点生成初始状态域,在初始状态域内利用相似性搜索得到出发状态点集;S3、计算出发状态点集Δt时间后的点位集合;S4、使用密度聚类算法对点位集合聚类,提取聚类结果主要集群并计算代表点,得到代表点集合Rc;S5、计算Rc各点在船舶轨迹分布密度图对应的密度值;S6、根据Rc计算本轮预测状态点信息。本发明改进了已有船舶轨迹预测方法精度不够高且仅能实现单轨迹预测的缺陷,通过灵活调节阈值的方式实现多航行模式的轨迹预测,兼顾不同时刻航速及航向等重要信息预测。向等重要信息预测。向等重要信息预测。
技术研发人员:夏辉宇
受保护的技术使用者:上海迈利船舶科技有限公司
技术研发日:2022.03.08
技术公布日:2022/6/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。