1.本发明涉及汽车技术领域,特别涉及一种能量回收控制方法、系统、可读存储介质及车辆。
背景技术:
2.随着社会的不断发展,汽车进入千家万户,新能源汽车因为绿色环保的特性越来越受到人们的青睐,因此纯电动汽车的保有量越来越高。
3.纯电动汽车是指以车载电源为动力,用电机驱动车轮行驶,符合道路交通、安全法规各项要求的车辆。目前,为了增加纯电动汽车的续航能力,在纯电动汽车制动或者滑行阶段都会进行能量的回收,纯电动汽车的电机通过回收制动或滑行阶段的能量,反向给动力电池充电。
4.现有技术中,新能源的纯电动车辆中大多使用车身电子稳定系统(electronic stability program,简称:esp)中的制动回收系统(regeneration brake system,简称:rbs)对电机进行滑行及制动过程中的能量回收控制。但由于esp无法实时监测车辆的当前参数,例如电机效率、电池包的允许充电功率,因此在车辆滑行、制动过程中rbs需求回收扭矩仅仅考虑减速度要求,无法最大程度上发挥出电机的最优能力,经济性较差。
技术实现要素:
5.有鉴于此,本发明的目的在于提供一种能量回收控制方法、系统、可读存储介质及车辆,旨在解决现有技术中车辆在进行能量回收时经济性差的问题。
6.本发明实施例是这样实现的:一种能量回收控制方法,应用于车辆的混合动力整车控制器当中,所述方法包括:
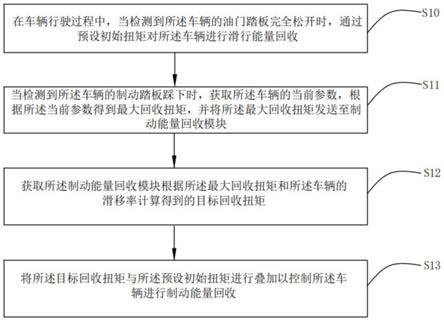
7.在车辆行驶过程中,当检测到所述车辆的油门踏板完全松开时,通过预设初始扭矩对所述车辆进行滑行能量回收;
8.当检测到所述车辆的制动踏板踩下时,获取所述车辆的当前参数,根据所述当前参数得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块;
9.获取所述制动能量回收模块根据所述最大回收扭矩和所述车辆的滑移率计算得到的目标回收扭矩;
10.将所述目标回收扭矩与所述预设初始扭矩进行叠加以控制所述车辆进行制动能量回收。
11.进一步地,上述能量回收控制方法,其中,所述在车辆行驶过程中,当检测到所述车辆的油门踏板完全松开时,通过预设初始扭矩对所述车辆进行滑行能量回收的步骤包括:
12.根据所述车辆的当前车速从预设映射表中获取与所述当前车速对应的预设初始扭矩。
13.进一步地,上述能量回收控制方法,其中,所述当前参数包括电池包允许充电功
率,所述当检测到所述车辆的制动踏板踩下时,获取所述车辆的当前参数,根据所述当前参数得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块的步骤包括:
14.当检测到所述车辆的制动踏板踩下时,获取所述车辆中的电池包允许充电功率,根据所述电池包允许充电功率得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块。
15.进一步地,上述能量回收控制方法,其中,所述当前参数包括电机效率,所述当检测到所述车辆的制动踏板踩下时,获取所述车辆的当前参数,根据所述当前参数得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块的步骤包括:
16.当检测到所述车辆的制动踏板踩下时,获取所述车辆中的电机效率,根据所述电机效率得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块。
17.进一步地,上述能量回收控制方法,其中,所述方法还包括:
18.获取所述车辆的电池包的当前剩余电量;
19.判断所述当前剩余电量是否高于电量阈值;
20.若是,则控制所述车辆停止能量回收。
21.进一步地,上述能量回收控制方法,其中,所述方法还包括:
22.实时获取所述车辆的当前状态参数,根据所述车辆的当前状态参数对车辆滑行能量回收过程中和车辆制动能量回收过程中的回收扭矩进行动态调整,以使所述车辆能量回收效率满足预设能量回收效率阈值。
23.本发明的另一个目的是提供一种能量回收控制系统,应用于车辆的混合动力整车控制器当中,所述系统包括:
24.滑行能量回收模块,用于在车辆行驶过程中,当检测到所述车辆的油门踏板完全松开时,通过预设初始扭矩对所述车辆进行滑行能量回收;
25.发送模块,用于当检测到所述车辆的制动踏板踩下时,获取所述车辆的当前参数,根据所述当前参数得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块;
26.计算模块,用于获取所述制动能量回收模块根据所述最大回收扭矩和所述车辆的滑移率计算得到的目标回收扭矩;
27.制动能量回收模块,用于将所述目标回收扭矩与所述预设初始扭矩进行叠加以控制所述车辆进行制动能量回收。
28.进一步地,上述能量回收控制系统,其中,所述滑行能量回收模块包括:
29.预设初始扭矩获取单元,用于根据所述车辆的当前车速从预设映射表中获取与所述当前车速对应的预设初始扭矩。
30.进一步地,上述能量回收控制系统,其中,所述当前参数包括电池包允许充电功率,所述发送模块包括:
31.第一发送单元,用于当检测到所述车辆的制动踏板踩下时,获取所述车辆中的电池包允许充电功率,根据所述电池包允许充电功率得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块。
32.进一步地,上述能量回收控制系统,其中,所述当前参数包括电机效率,所述发送模块包括:
33.第二发送单元,用于当检测到所述车辆的制动踏板踩下时,获取所述车辆中的电
机效率,根据所述电机效率得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块。
34.进一步地,上述能量回收控制系统,其中,所述系统还包括:
35.电量获取模块,用于获取所述车辆的电池包的当前剩余电量;
36.判断所述当前剩余电量是否高于电量阈值;
37.若是,则控制所述车辆停止能量回收。
38.进一步地,上述能量回收控制系统,其中,所述系统还包括:
39.调整模块,用于实时获取所述车辆的当前状态参数,根据所述车辆的当前状态参数对车辆滑行能量回收过程中和车辆制动能量回收过程中的回收扭矩进行动态调整,以使所述车辆能量回收效率满足预设能量回收效率阈值。
40.本发明实施例的另一个目的是提供一种可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现上述的方法的步骤。
41.本发明实施例的另一个目的是提供一种车辆,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述的方法的步骤。
42.本发明通过在车辆进行制动能量回收时,获取车辆的当前参数,通过车辆当前参数得到车辆的最大回收扭矩,并通过整车控制器实施对滑行能量回收与制动能量回收的集中控制,得到目标回收扭矩,使车轮制动扭矩与滑行能量回收、制动能量回收之间相互协调,发挥电机的最大可充电能力,回收能力运用优化,提高了能量回收的经济性,解决了现有技术中能量回收时的经济性低的问题。
附图说明
43.图1为本发明第一实施例中提供的能量回收控制方法的流程图;
44.图2为本发明第二实施例中提供的能量回收控制方法的流程图;
45.图3为本发明第三实施例中提供的能量回收控制系统的结构框图。
46.如下具体实施方式将结合上述附图进一步说明本发明。
具体实施方式
47.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的若干实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
48.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
49.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列类型的任意的和所有的组合。
50.随着社会的不断发展,汽车进入千家万户,新能源汽车因为绿色环保的特性越来越受到人们的青睐,因此纯电动汽车的保有量越来越高。
51.纯电动汽车是指以车载电源为动力,用电机驱动车轮行驶,符合道路交通、安全法规各项要求的车辆。目前,为了增加纯电动汽车的续航能力,在纯电动汽车制动或者滑行阶段都会进行能量的回收,纯电动汽车的电机通过回收制动或滑行阶段的能量,反向给动力电池充电。
52.现有技术中,新能源的纯电动车辆中大多使用车身电子稳定系统(electronic stability program,简称:esp)中的制动回收系统(regeneration brake system,简称:rbs)对电机进行滑行及制动过程中的能量回收控制。但由于esp无法实时监测车辆的当前参数,例如电机效率、电池包的允许充电功率,因此在车辆滑行、制动过程中rbs需求回收扭矩仅仅考虑减速度要求,无法最大程度上发挥出电机的最优能力,经济性较差。
53.以下将结合具体实施例和附图来详细说明如何提升车辆在进行能量回收控制时的经济性。
54.实施例一
55.请参阅图1,所示为本发明第一实施例中的能量回收控制方法,应用于车辆的混合动力整车控制器当中,所述方法包括步骤s10~s13。
56.步骤s10,在车辆行驶过程中,当检测到所述车辆的油门踏板完全松开时,通过预设初始扭矩对所述车辆进行滑行能量回收。
57.其中,通过接收油门踏板的开度信号来获取油门踏板的开度的程度以及油门踏板是否完全松开,例如,当油门踏板开度信号值为零时,表示当前油门踏板完全松开,当油门踏板完全松开,则表示车辆进入滑行阶段,通过预设初始扭矩对车辆进行滑行阶段的能量回收,混合动力整车控制器请求电机通过该初始扭矩对车辆进行能量回收。
58.具体的,根据所述车辆的当前车速从预设映射表中获取与所述当前车速对应的预设初始扭矩,其中,预设初始扭矩的设定可以根据当前车速进行设定,当在车速较高时,预设初始扭矩设定大一些,当在车速较低时,预设初始扭矩设定较小一些,示例而非限定,在具体实施时,车速与预设初始扭矩的映射表可以如表1所示:
59.表1、
[0060][0061]
步骤s11,当检测到所述车辆的制动踏板踩下时,获取所述车辆的当前参数,根据所述当前参数得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块。
[0062]
在检测到车辆的制动踏板踩下时,表示当前车辆由滑行状态变成制动状态,此时,车辆的制动能量回收模块进行介入,与之前的滑行能量回收共同作用实现车辆的能量回收,为了提升车辆在进行能量回收时的经济性,获取车辆的当前参数,根据当前参数得到能量回收的最大回收扭矩,即在车辆的行驶过程中,某些状态参数会影响车辆的能量回收效果,通过获取车辆的当前参数,可以提前知悉车辆的最大回收扭矩,例如,当车辆在制动时有200n*m可以进行能量回收,而当前车辆可接收的回收扭矩为160n*m,此时便可以160n*m的扭矩作为标准进行能量回收。
[0063]
步骤s12,获取所述制动能量回收模块根据所述最大回收扭矩和所述车辆的滑移率计算得到的目标回收扭矩。
[0064]
具体的,制动能量回收模块根据当前工况下的车辆滑移率,计算出制动能量回收模块的目标回收扭矩后反馈给整车控制器。
[0065]
步骤s13,将所述目标回收扭矩与所述预设初始扭矩进行叠加以控制所述车辆进行制动能量回收。
[0066]
具体的,整车控制器在接收到反馈的目标回收扭矩后与滑行时的预设初始扭矩进行叠加作用于轮边提供制动减速度以控制车辆进行制动能量回收。
[0067]
综上,本发明上述实施例中的能量回收控制方法,在车辆进行制动能量回收时,获取车辆的当前参数,通过车辆当前参数得到车辆的最大回收扭矩,并通过整车控制器实施对滑行能量回收与制动能量回收的集中控制,得到目标回收扭矩,使车轮制动扭矩与滑行能量回收、制动能量回收之间相互协调,发挥电机的最大可充电能力,回收能力运用优化,提高了能量回收的经济性,解决了现有技术中能量回收时的经济性低的问题。
[0068]
实施例二
[0069]
请参阅图2,所示为本发明第二实施例中的能量回收控制方法,应用于车辆的混合动力整车控制器当中,所述方法包括步骤s20~s24。
[0070]
步骤s20,在车辆行驶过程中,当检测到所述车辆的油门踏板完全松开时,通过预设初始扭矩对所述车辆进行滑行能量回收。
[0071]
步骤s21,当检测到所述车辆的制动踏板踩下时,获取所述车辆中的电池包允许充电功率,根据所述电池包允许充电功率得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块。
[0072]
其中,当前参数包括电池包允许充电功率,当获取到电池包允许的充电功率即可确定能量回收的最大功率,通过能量回收的最大功率便可知道车辆的能量回收的最大扭矩,从而保证能量回收过程中提供的扭矩不会进行富余,避免能量回收的扭矩溢出。
[0073]
在实际中,影响车辆能量回收效率的不仅仅是电池包的允许充电功率,电机的充电效率也会影响车辆能量回收效率。
[0074]
有鉴于此,在本发明一些可选的实施例当中,当检测到所述车辆的制动踏板踩下时,获取所述车辆中的电机效率,根据所述电机效率得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块。
[0075]
可以理解的,电机的充电效率会随着外界的因素进行改变,例如,温度的变化,当温度较低时,电机充电效率较低,而当温度较高时,电机的充电效率相对较高,根据电机效率可以进一步了解当前车辆能量的最大回收效率,通过能量回收的最大功率便可知道车辆的能量回收的最大扭矩,避免能量回收的溢出。
[0076]
另外,为了进一步的提升能量回收时的安全性,在本发明一些可选的实施例当中,所述方法还包括:
[0077]
获取所述车辆的电池包的当前剩余电量;
[0078]
判断所述当前剩余电量是否高于电量阈值;
[0079]
若是,则控制所述车辆停止能量回收。
[0080]
可以理解的,通过获取车辆的电池包的当前剩余电量,判断当前剩余电量是否高于电量阈值,其中,电量阈值可以根据实际情况进行设定。例如90%、95%这里不予限定,当判断到当前剩余电量高于电量阈值后,控制车辆停止能量回收,避免车辆电池包过程。
[0081]
进一步的,在车辆进行能量回收时,还可以获取在某一预设时间段内的能量回收累计时长,判断能量回收累计时长是否高于预设时长,当能量回收累计时长高于预设时长时,控制车辆停止能量回收,例如,在一天内,的能量回收累计时长为2小时,预设时长为1.5小时,此时能量回收累计时长高于预设时长时,控制车辆停止能量回收。
[0082]
步骤s22,获取所述制动能量回收模块根据所述最大回收扭矩和所述车辆的滑移率计算得到的目标回收扭矩。
[0083]
步骤s23,将所述目标回收扭矩与所述预设初始扭矩进行叠加以控制所述车辆进行制动能量回收。
[0084]
步骤s24,实时获取所述车辆的当前状态参数,根据所述车辆的当前状态参数对车辆滑行能量回收过程中和车辆制动能量回收过程中的回收扭矩进行动态调整,以使所述车辆能量回收效率满足预设能量回收效率阈值。
[0085]
其中,通过实时获取所述车辆的当前状态参数,可以获取车辆的可接受的能量回收扭矩,从而在车辆滑行能量回收过程中和车辆制动能量回收过程中的回收扭矩进行动态调整,以使车辆能量回收效率满足预设能量回收效率阈值。
[0086]
综上,本发明上述实施例中的能量回收控制方法,在车辆进行制动能量回收时,获取车辆的当前参数,通过车辆当前参数得到车辆的最大回收扭矩,并通过整车控制器实施对滑行能量回收与制动能量回收的集中控制,得到目标回收扭矩,使车轮制动扭矩与滑行能量回收、制动能量回收之间相互协调,发挥电机的最大可充电能力,回收能力运用优化,提高了能量回收的经济性,解决了现有技术中能量回收时的经济性低的问题。并且在车辆满足停止能量回收条件时,控制车辆停止能量回收,提升了车辆在进行能量回收时的安全性。
[0087]
实施例三
[0088]
请参阅图3,所示为本发明第三实施例当中提出的能量回收控制吸引,应用于车辆的混合动力整车控制器当中,所述系统包括:
[0089]
滑行能量回收模块100,用于在车辆行驶过程中,当检测到所述车辆的油门踏板完全松开时,通过预设初始扭矩对所述车辆进行滑行能量回收;
[0090]
发送模块200,用于当检测到所述车辆的制动踏板踩下时,获取所述车辆的当前参数,根据所述当前参数得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块;
[0091]
计算模块300,用于获取所述制动能量回收模块根据所述最大回收扭矩和所述车辆的滑移率计算得到的目标回收扭矩;
[0092]
制动能量回收模块400,用于将所述目标回收扭矩与所述预设初始扭矩进行叠加以控制所述车辆进行制动能量回收。
[0093]
进一步地,上述能量回收控制系统,其中,所述滑行能量回收模块包括:
[0094]
预设初始扭矩获取单元,用于根据所述车辆的当前车速从预设映射表中获取与所述当前车速对应的预设初始扭矩。
[0095]
进一步地,上述能量回收控制系统,其中,所述当前参数包括电池包允许充电功率,所述发送模块包括:
[0096]
第一发送单元,用于当检测到所述车辆的制动踏板踩下时,获取所述车辆中的电池包允许充电功率,根据所述电池包允许充电功率得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块。
[0097]
进一步地,上述能量回收控制系统,其中,所述当前参数包括电机效率,所述发送模块包括:
[0098]
第二发送单元,用于当检测到所述车辆的制动踏板踩下时,获取所述车辆中的电机效率,根据所述电机效率得到最大回收扭矩,并将所述最大回收扭矩发送至制动能量回收模块。
[0099]
进一步地,上述能量回收控制系统,其中,所述系统还包括:
[0100]
电量获取模块,用于获取所述车辆的电池包的当前剩余电量;
[0101]
判断所述当前剩余电量是否高于电量阈值;
[0102]
若是,则控制所述车辆停止能量回收。
[0103]
进一步地,上述能量回收控制系统,其中,所述系统还包括:
[0104]
调整模块,用于实时获取所述车辆的当前状态参数,根据所述车辆的当前状态参数对车辆滑行能量回收过程中和车辆制动能量回收过程中的回收扭矩进行动态调整,以使
所述车辆能量回收效率满足预设能量回收效率阈值。
[0105]
上述各模块被执行时所实现的功能或操作步骤与上述方法实施例大体相同,在此不再赘述。
[0106]
综上,本发明上述实施例通过在车辆进行制动能量回收时,获取车辆的当前参数,通过车辆当前参数得到车辆的最大回收扭矩,并通过整车控制器实施对滑行能量回收与制动能量回收的集中控制,得到目标回收扭矩,使车轮制动扭矩与滑行能量回收、制动能量回收之间相互协调,发挥电机的最大可充电能力,回收能力运用优化,提高了能量回收的经济性,解决了现有技术中能量回收时的经济性低的问题。
[0107]
实施例四
[0108]
本发明另一方面还提供一种可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现上述实施例一至二中任意一个所述的方法的步骤。
[0109]
实施例五
[0110]
本发明另一方面还提供一种车辆,所述车辆包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述实施例一至二中任意一个所述的方法的步骤。
[0111]
以上各个实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0112]
本领域技术人员可以理解,在流程图中表示或在此以其他方式描述的逻辑和/或步骤,例如,可以被认为是用于实现逻辑功能的可执行指令的定序列表,可以具体实现在任何计算机可读介质中,以供指令执行系统、装置或设备(如基于计算机的系统、包括处理器的系统或其他可以从指令执行系统、装置或设备取指令并执行指令的系统)使用,或结合这些指令执行系统、装置或设备而使用。就本说明书而言,“计算机可读介质”可以是任何可以包含、存储、通信、传播或传输程序以供指令执行系统、装置或设备或结合这些指令执行系统、装置或设备而使用的装置。
[0113]
计算机可读介质的更具体的示例(非穷尽性列表)包括以下:具有一个或多个布线的电连接部(电子装置),便携式计算机盘盒(磁装置),随机存取存储器(ram),只读存储器(rom),可擦除可编辑只读存储器(eprom或闪速存储器),光纤装置,以及便携式光盘只读存储器(cdrom)。另外,计算机可读介质甚至可以是可在其上打印所述程序的纸或其他合适的介质,因为可以例如通过对纸或其他介质进行光学扫描,接着进行编辑、解译或必要时以其他合适方式进行处理来以电子方式获得所述程序,然后将其存储在计算机存储器中。
[0114]
应当理解,本发明的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或它们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(pga),现场可编程门阵列(fpga)等。
[0115]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特
点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0116]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
